

Экспериментальная часть
Исходные данные для выполнения лабораторной работы представлены в таблице 1.
Таблица 1 – Исходные данные
Моделирование линейных систем на ЭВМ |
Вариант 13 |
Исходные данные |
Т1 = 6 Т2 = 9 Т3 = 12 Т4 = 6 Коб = 1,2 Ков = 1,2 |
По результатам расчета строится график переходной характеристики, по которому находится значения параметров аппроксимирующей модели Коб, Тоб, об. График переходной характеристики представлен на рисунке 7.
 Рисунок
7 – График переходной функции
Рисунок
7 – График переходной функции
Из графика переходной характеристики объекта находим Коб = 1,2; Тоб = 35,2 с; об = 6,6 с.
По найденным значениям Коб, Тоб, об находим параметры настройки регуляторов, используя следующие соотношения:
- для пропорционального регулятора:

- для интегрального регулятора:

- для пропорционально-интегрального регулятора:

Длительность процесса интегрирования ориентировочно можно оценить по величине постоянных объекта:

Шаг
интегрирования h
выбирается достаточно малым, однако
величина шага должна удовлетворять
условно

Периодичность вывода на экран М задается произвольно и представляет собой целое число. Пусть М = 10.
Используя исходные данные и рассчитанные параметры для настройки регуляторов, значения длительности процесса интегрирования и его шаг, произвели расчет АСР на ЭВМ. АСР с П-, И- и ПИ-регуляторов представлены на рисунках 8, 9 и 10 соответственно.
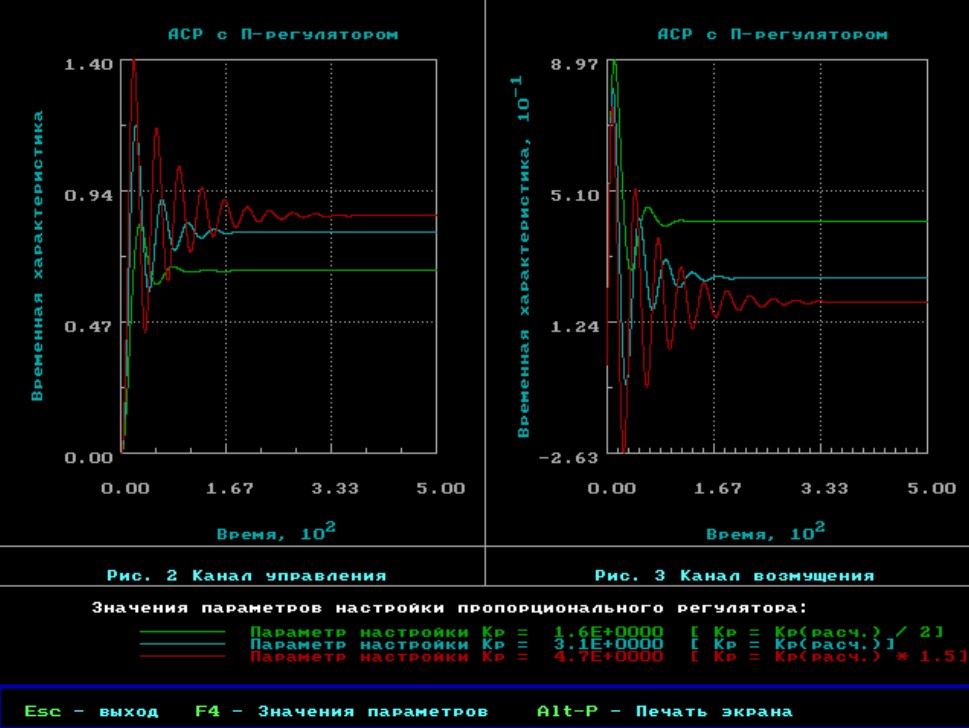 Рисунок
8 – АСР с П-регулятором
(время
интегрирования увеличено до 500 с)
Рисунок
8 – АСР с П-регулятором
(время
интегрирования увеличено до 500 с)
 Рисунок
9 – АСР с И-регулятором
Рисунок
9 – АСР с И-регулятором
 Рисунок
10 – АСР с ПИ-регулятором
(время
интегрирования увеличено до 333 секунд)
Рисунок
10 – АСР с ПИ-регулятором
(время
интегрирования увеличено до 333 секунд)
Для оценки качества переходного процесса необходимо, чтобы параметры переходных процессов были оптимальными:
Адин min;
зад;
рmin;
стmin.
Таким образом, результаты исследования линейной АСР с различными типами регуляторов представлены в таблице 2.
Таблица 2 – Сравнительный анализ качества процессов регулирования
Регулятор |
Параметры настройки |
Оценки качества переходного процесса |
|||||||
Канал управления |
Канал возмущения |
||||||||
Ад |
Ψ |
τр |
∆ст |
Ад |
Ψ |
τр |
∆ст |
||
П |
Кр=1,6 |
0,17 |
0,95 |
168 |
0,35 |
0,49 |
0,89 |
125 |
0,59 |
Кр= 3,1 |
0,35 |
0,77 |
171 |
0,18 |
0,55 |
0,60 |
200 |
0,75 |
|
Кр=4,7 |
0,55 |
0,42 |
360 |
0,15 |
0,56 |
0,43 |
333 |
0,81 |
|
И |
Ер=0,07 |
Незатухающие колебания |
|||||||
Ер=0,14 |
Незатухающие колебания (расходящийся процесс) |
||||||||
Ер=0,21 |
Незатухающие колебания (расходящийся процесс) |
||||||||
ПИ |
Кр = 0,063 Ти = 24,64 |
0,26 |
0,92 |
165 |
0 |
0,72 |
0,84 |
165 |
0 |
Кр = 0,130 Ти = 24,64 |
0,72 |
0,59 |
333 |
0 |
0,66 |
0,60 |
333 |
0 |
|
Кр = 0,19 Ти = 24,64 |
Слабозатухающий переходный процесс |
||||||||
Вывод: в ходе выполнения лабораторной работы проведено знакомство с методикой составления математической модели линейной АСР по структурной схеме, а также приобретены навыки использования ЭВМ для исследования линейных АСР. По полученным данным, можно сделать выводы:
У П-регулятора при Кр = 1,6 большая статическая ошибка по каналу управления 0,35, а по каналу возмущения 0,59, но небольшое время регулирования по каналу управления и возмущения, 168 и 125 с соответственно, самые низкие показания динамической ошибки (0,17 и 0,49 соответственно) и высокие значения степени затухания переходного процесса (0,95 и 0,89 соответственно). Он может использоваться, если статическая ошибка находится в пределах технологического допуска.
Для И-регулятора невозможно провести оценку переходных процессов, так как во всех случаях наблюдаются незатухающие колебания;
Для ПИ-регулятора при Кр = 0,063 и Ти = 24,64 статическая ошибка по каналам управления и возмущения равна. Здесь же наблюдается наименьшее время регулирования по обоим каналам, равное 165 с. Динамическая ошибка АСР с ПИ-регулятором больше, чем для АСР с П-регулятором. Но преимущества по статической характеристике делают его предпочтительней.
Проанализировав данные из таблицы 2, можно сделать выводы:
Выбор П-регулятора по оптимальным параметрам переходных процессов, однако, значения статической ошибки далеки от идеала.
В случае же с ПИ-регулятором, оптимальными значениями не обладают такие параметры, как динамическая ошибка и статическая ошибка по каналу возмущения.
Если сравнить в совокупности все параметры переходных процессов для П- и ПИ- регуляторов, то выбор складывается в пользу ПИ-регулятора.
Министерство науки и высшего образования Российской Федерации
Федеральное государственное автономное образовательное учреждение
высшего профессионального образования
«НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ
ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Инженерная школа природных ресурсов