

Курсач Афоня-Мудак (Определение позиционных характеристик понтона)
.docx
 Федеральное
агентство морского и речного транспорта
Федеральное
государственное
бюджетное
образовательное учреждение высшего
образования
Федеральное
агентство морского и речного транспорта
Федеральное
государственное
бюджетное
образовательное учреждение высшего
образования
ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ МОРСКОГО И РЕЧНОГО ФЛОТА
имени адмирала С. О. МАКАРОВА
ИНСТИТУТ ВОДНОГО ТРАНСПОРТА
Кафедра судостроения и энергетических установок
Курсовой проект
«Определение позиционных характеристик понтона»
по дисциплине «Вычислительный эксперимент в проектировании объектов морской (речной) техники»
Выполнил: студент группы М-11
Авцин. В.М.
Проверил: Афанасьев М.П.
Санкт-Петербург 2024
Оглавление
Введение 3
Создание геометрии. 4
Расчеты 5
0 градусов 5
10 градусов 9
20 градусов 10
30 градусов 11
45 градусов 12
90 градусов 13
Построение графиков зависимости позиционных характеристик от угла 𝜷 14
Вывод 16
Введение
При движении судна на корпусе возникают усилия, которые в безразмерном виде приведены к коэффициентам 𝐶𝑥, 𝐶𝑦, 𝐶𝑀𝑧 (позиционным характеристикам).
Цель работы: спроектировать прямоугольный понтон и исследовать его позиционные характеристики в диапазоне углов от 0 до 90 градусов с помощью платформы для инженерного анализа SimScale.
Исходные данные:
Прямоугольный понтон с главными размерениями:
L=1,885 м
B=0,6 м
T=0,067 Fn=0,15
Создание геометрии.
Для того чтобы исследовать позиционные характеристики прямоугольного понтона, необходимо создать его модель.
 Это
было выполнено
в ПО
«FreeCAD»
Это
было выполнено
в ПО
«FreeCAD»
Рисунок 1 - Модель прямоугольного понтона
Далее в SimScale был добавлен Flow Region (вода) вокруг понтона таким образом, чтобы:
Слева и сверху от понтона было пространство, приблизительно равное одной длине понтона;
Справа от понтона было пространство, приблизительно равное 3- 4 длин понтона;
Снизу – 2 длины;
 Глубина
Flow
Region
=6T.
Глубина
Flow
Region
=6T.
Рисунок 2 -Flow Region
0 градусов
Расчеты
Первый расчет задан таким образом, что поток набегает под углом 0 градусов к оси х

Рисунок 3 - Расположение осей
Материалом Flow Region выбрана вода
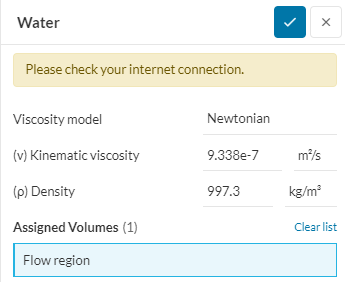
Рисунок 4 - Характеристики Flow Region
Заданы следующие начальные условия:
𝑈𝑥 = 0,63
Граничные условия:
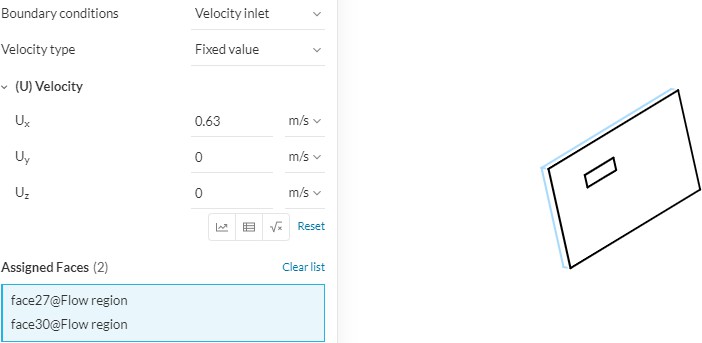
Рисунок 5 - Граничные условия (скорость)
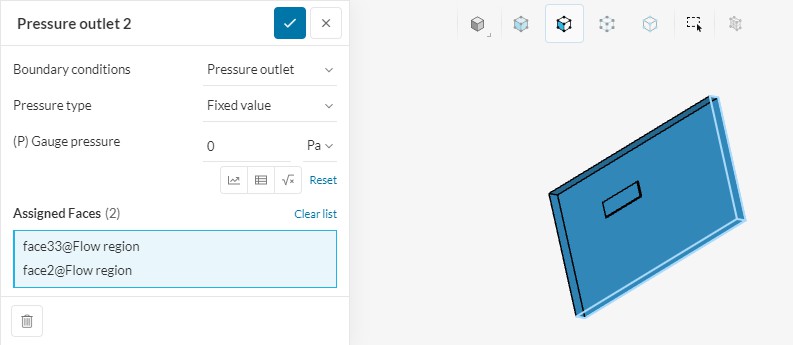
Рисунок 6 - Граничные условия (давление)
По ватерлинии была задана плоскость симметрии:
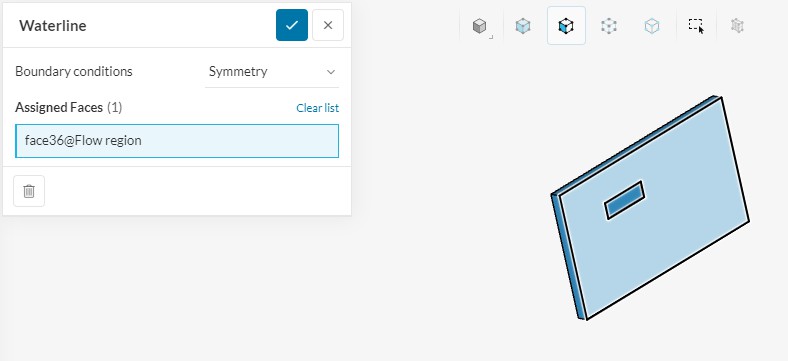
Рисунок 7 - Граничные условия (симметрия)
С помощью граничного условия «Wall => Slip» была задана имитация дна.
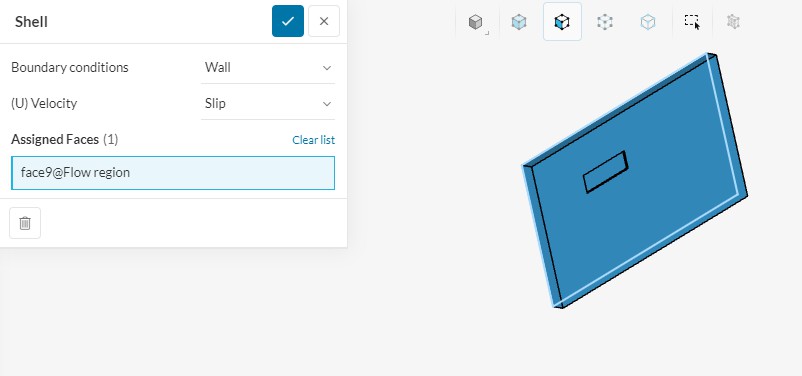
Рисунок 8 - граничные условия (стена)
Также с помощью граничного условия «Wall», но в данном случае «No-Slip» был сымитирован корпус понтона
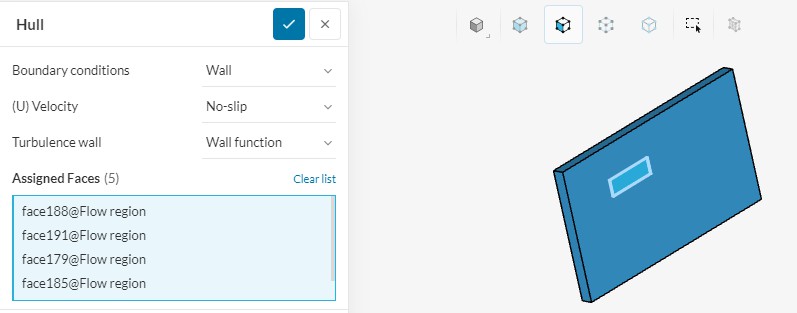
Рисунок 9 - Граничные условия (стена)
Для расчета необходимо сгенерировать сетку. А для того чтобы получить более точные значения возле корпуса понтона, должны присутствовать пограничные слои. В данном случае их три.

Рисунок 10 - Сетка и ее параметры
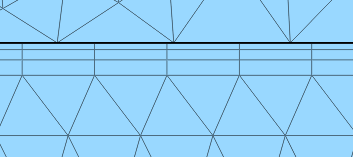
Рисунок 11 - Пограничные слои
В результате получилось следующее:
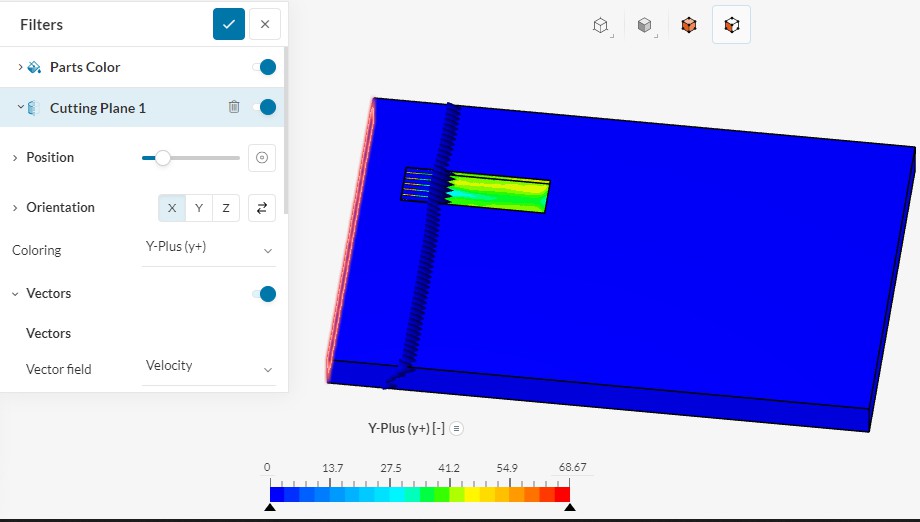
Рисунок 12 - направление векторов скорости
𝑋 = 𝑋𝑝 + 𝑋𝑣 = 9,67 + 0,43 = 10,1 Н
𝑌 = 𝑌𝑝 + 𝑌𝑣 = 0,04 − 0,02 = 0,02 Н
𝑀𝑧 = 𝑀𝑧𝑝 + 𝑀𝑧𝑣 = 0,026 − 0,003 = 0,023 Нм
10 градусов
Поток набегает под углом 10 градусов к оси х
В этой и последующих симуляциях меняются только граничные условия, связанные со скоростями.

Рисунок 13 - Граничные условия (скорость; 10 градусов)

Рисунок 14 - Направление векторов скорости
𝑋 = 𝑋𝑝 + 𝑋𝑣 = 10,82 + 0,79 = 11,61 Н
𝑌 = 𝑌𝑝 + 𝑌𝑣 = −3,14 − 0,23 = −3,37 Н
𝑀𝑧 = 𝑀𝑧𝑝 + 𝑀𝑧𝑣 = 0,498 − 0,026 = 0,472 Нм
20 градусов
Поток набегает под углом 20 градусов к оси х
В этой и последующих симуляциях меняются только граничные условия, связанные со скоростями.
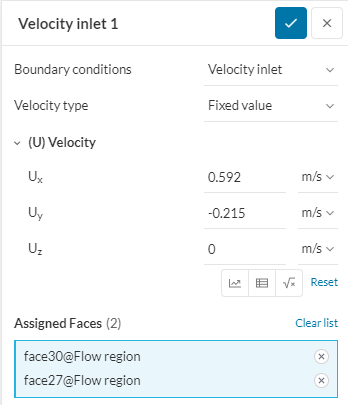
Рисунок 15 - Граничные условия (скорость; 10 градусов)
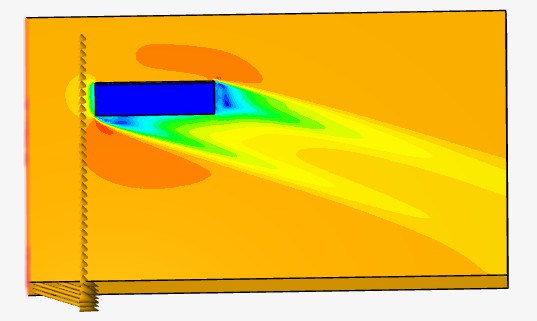
Рисунок 16 - Направление векторов скорости
𝑋 = 𝑋𝑝 + 𝑋𝑣 = 10,49 + 0,99 = 11,48 Н
𝑌 = 𝑌𝑝 + 𝑌𝑣 = −8,16 − 0,42 = −8,58 Н
𝑀𝑧 = 𝑀𝑧𝑝 + 𝑀𝑧𝑣 = 1,08 + 0,01 = 1,09 Нм
30 градусов
Поток набегает под углом 30 градусов к оси х
В этой и последующих симуляциях меняются только граничные условия, связанные со скоростями.
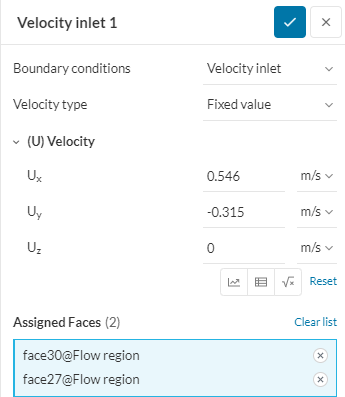
Рисунок 17 - Граничные условия (скорость; 10 градусов)
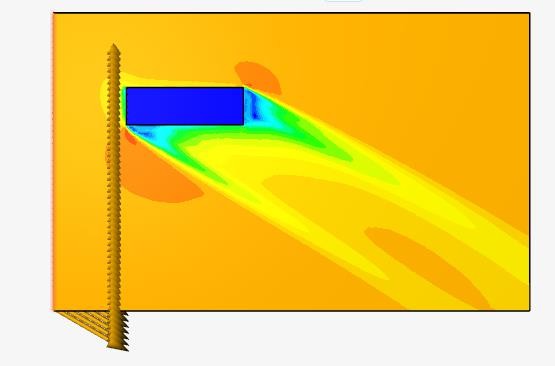
Рисунок 18 - Направление векторов скорости
𝑋 = 𝑋𝑝 + 𝑋𝑣 = 9,33 + 1,01 = 10,34 Н
𝑌 = 𝑌𝑝 + 𝑌𝑣 = −13,79 − 0,52 = −14,31 Н
𝑀𝑧 = 𝑀𝑧𝑝 + 𝑀𝑧𝑣 = 1,66 + 0,06 = 1,72 Нм
45 градусов
Поток набегает под углом 45 градусов к оси х
В этой и последующих симуляциях меняются только граничные условия, связанные со скоростями.

Рисунок 19 - Граничные условия (скорость; 10 градусов)
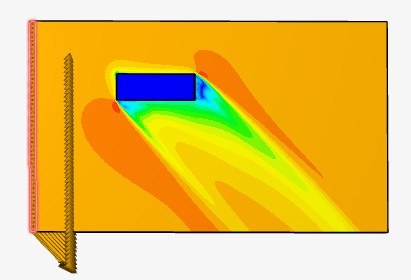
Рисунок 20 - Направление векторов скорости
𝑋 = 𝑋𝑝 + 𝑋𝑣 = 6,80 + 0,91 = 7,71 Н
𝑌 = 𝑌𝑝 + 𝑌𝑣 = −22,42 − 0,48 = −22,9 Н
𝑀𝑧 = 𝑀𝑧𝑝 + 𝑀𝑧𝑣 = 2,55 + 0,13 = 2,68 Нм
90 градусов
Поток набегает под углом 90 градусов к оси х
В этой и последующих симуляциях меняются только граничные условия, связанные со скоростями.
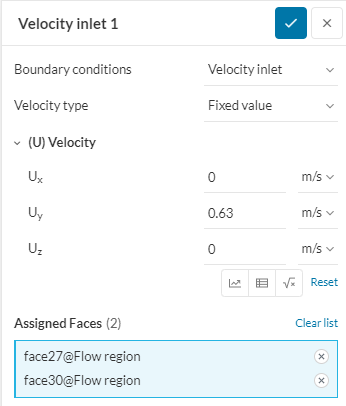
Рисунок 21 - Граничные условия (скорость; 10 градусов)
Рисунок 22 - Направление векторов скорости
𝑋 = 𝑋𝑝 + 𝑋𝑣 = −2,25 − 0,25 = −2,5 Н
𝑌 = 𝑌𝑝 + 𝑌𝑣 = 29,56 + 0,21 = 29,77 Н
𝑀𝑧 = 𝑀𝑧𝑝 + 𝑀𝑧𝑣 = 2,596 + 0,105 = 2,701 Нм
Построение графиков зависимости позиционных характеристик от угла 𝜷.
Таблица 1 - Исходные данные для построения графиков
-
β
X
𝑪𝒙
Y
𝑪𝒚
𝑴𝒛
𝑪𝑴𝒛
0
10,1
402,98
0,02
0,80
0,023
0,49
10
11,61
463,23
-3,37
-134,46
0,472
9,99
20
11,48
458,04
-8,58
-342,33
1,09
23,07
30
10,34
412,56
-14,31
-570,96
1,72
36,41
45
7,71
307,62
-22,9
-913,69
2,68
56,73
60
4,61
183,93
-30,71
-1225,30
3,13
66,25
75
2,29
91,37
-33,13
-1321,86
2,37
50,16
90
-0,061
-2,43
-33,34
-1330,23
-0,475
-10,05
В этой таблице:
2𝑋
 𝐶𝑥
=
𝜌𝑣2𝐿𝑇
𝐶𝑥
=
𝜌𝑣2𝐿𝑇
2𝑌
𝐶𝑦 = 𝜌𝑣2𝐿𝑇
2𝑀𝑧
 𝐶𝑀𝑧
=
𝜌𝑣2𝐿2𝑇
𝐶𝑀𝑧
=
𝜌𝑣2𝐿2𝑇
 500,00
500,00
400,00
300,00
Сх
100,00
0,00
-100,00
Название оси
Рисунок 23 - Зависимость Сх от 𝜷
 200,00
200,00
0,00
-200,00
-400,00
Су
-800,00
-1000,00
-1200,00
-1400,00
-1600,00
Название оси
Рисунок 24 - Зависимость Сy от β
80,00
70,00
60,00
50,00
CMz
30,00
20,00
10,00
0,00
-10,00
-20,00
0 20 40 60 80 100
 β
β
Рисунок 25 - Зависимость СMz от β
Вывод
В ходе работы над курсовым проектом была сделана модель прямоугольного понтона с заданными главными размерениями. С помощью этой модели и доступными ПО были найдены позиционные характеристики (безразмерные гидродинамические коэффициенты), которые пригодятся для дальнейшего исследования гидродинамических характеристик понтона.