2 |
|
|
H |
а |
a |
|
|
|
2 |
а |
2 |
|
H |
H |
|
|
|
|
|
|
|
Рис. 13.8 |
Изгибающий момент равен объему эпюры сжимающих напряжений,
умноженному на плечо |
= |
H |
a |
пары внутренних сил. Равнодейству- |
|
|
2 |
|
|
|
|
|
|
ющая эпюры этих напряжений равна b |
H |
a |
|
. В таком случае момент |
|
|
|
|
|
|
|
|
Т |
|
|
|
|
|
2 |
|
|
|
M, возникающий в сечении, находится по формуле |
|
|
M b |
H |
a |
H |
a |
|
b |
|
H 2 |
a2 |
|
. |
|
|
|
|
|
|
Т |
|
4 |
|
|
Т |
|
2 |
|
2 |
|
|
|
|
|
|
|
Подставив величину продольной силы N, определяемую по формуле (13.3), в последнее выражение, находят соотношение между продольной силой и изгибающим моментом в предельном состоянии поперечного сечения стержня
|
|
M |
bH 2 |
|
|
|
N 2 |
. |
|
(13.4,а) |
|
|
|
4 |
4b 2 |
|
|
|
|
|
|
|
|
Т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
|
|
Обозначив предельные значения изгибающих моментов и продольных |
сил |
|
|
bH 2 |
|
|
|
|
|
|
|
|
|
|
|
|
M |
Т |
|
, |
|
|
N |
Т |
bH 2 |
Т |
, |
|
|
|
|
|
|
4 |
|
|
Т |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
полученное соотношение можно переписать в виде* |
|
|
|
|
|
M |
|
|
|
N |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1. |
|
(13.4,б) |
|
|
|
|
|
|
|
NТ |
|
|
|
|
|
|
MТ |
|
|
|
|
|
|
|
Если к тому же ввести обозначения для безразмерных величин
продольных сил n |
N |
и изгибающих моментов |
m |
M |
, то условие |
|
|
|
NТ |
|
MТ |
пластичности сечения запишется более компактно |
|
|
|
|
|
m n2 1. |
|
|
(13.4,в) |
* Величина WT= bH2/4 называется пластическим моментом сопротивления сечения. Для стержня прямоугольного сечения она в 1,5 раза больше, чем упругий момент сопротивления WT= bH2/6, т.е.
WT=1,5W.
201

Условие предельного состояния сечения графически изображается в видедвухпарабола, симметричныхотносительнооси n (рис. 13.9). Нижняя парабола служит условием текучести сечения на участках стержня с отрицательными моментами. Поэтому в общем случае условие текучести
можно представить в виде m n2 1, где m обозначает модуль изгибающего момента.
в
1
Рис. 13.9
Для стержней, поперечное сечение которых отличается от прямоугольного, условия текучести будут отличаться от (13.4). Например, для сечений, близких к двутавровым (у которых стенка сильно ослаблена), т. н. идеальных двутавров (рис. 13.9,в), условие текучести принимает вид
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
N |
|
1, |
(13.5,а) |
|
|
MТ |
NТ |
|
|
|
|
|
|
|
|
или |
|
|
|
|
|
|
|
|
|
m |
|
|
|
n |
|
1. |
(13.5,б) |
|
|
|
|
|
|
Графически оно может быть проиллюстрировано квадратом «в», вписанным в параболу (см. рис. 13.9). Для других сечений, таких, как круглые, двутавры из сортаментов и др., условия текучести будут представлены в виде многоугольников, расположенных между параболой и квадратом. В частности, условие текучести трехслойного прямоугольного сечения аппроксимируется восьмиугольником «б». Перечисленные условия

пластичности часто используются в расчётах несущей способности сжатоизогнутых стоек и арок [8].
Доказано, что для криволинейных стержней, радиус кривизны которых в 8-10 раз превышает высоту сечения, распределение напряжений в упругопластической стадии и в состоянии полной пластичности сечения стержня практически не отличается от того, которое имеет место в сечении прямого бруса при тех же внутренних силовых факторах, и, следовательно, при анализе предельного равновесия сжато-изогнутых стержней или арок, как стержней малой кривизны, возможно применение условия предельного состояния сечения, полученного для прямолинейного стержня.
Если при исследовании несущей способности учитывать ещё и поперечные силы Q в сжато-изогнутых стержней, то условия текучести усложняются. Например, для стержня двутаврового сечения с тонкой стенкой (идеального двутавра) условие текучести графически изображается в виде поверхности шара, симметричносрезаннойплоскостямисчетырехсторон(рис. 13.10).
 q
q
 n
n
m
Рис. 13.10
На рис. 13.10 показана только четверть этой поверхности, уравнение которойимеетвид
|
|
М |
|
N |
2 |
|
|
M |
|
N |
2 |
|
Q |
, |
(13.6,а) |
|
1 |
|
|
|
1 |
|
|
2 |
|
М |
|
N |
|
M |
|
N |
|
Q |
|
|
Т |
|
Т |
|
|
Т |
|
Т |
|
|
|
|
|
|
|
|
|
|
|
|
Т |
|
|
где QТ – предельное значение усилия Q в сечении. В безразмерных параметрах условие (13.6,а) записывается короче, а именно:
1 m n 2 |
|
1 m n 2 |
2q . |
(13.6,б) |

Здесь m, n обозначают параметры величин внутренних усилий M и N, а
q Q – характеризуетбезразмерныйпараметрпоперечнойсилывсечении
QТ
стержня.
В работах [9], [10] автора на основе приведенных условий пластичности был выполнен подробный анализ пластического состояния арок кругового очертания. При этом было исправлено бытовавшее прежде ошибочное представление о характере разрушения пологих арок.
13.3. Ассоциированный закон течения
иего геометрическое представление
Втеории пластичности известны различные модели пластического деформирования твёрдых тел. Наибольшее распространение получили теория пластического потенциала или пластического течения и деформационная теория [8]. Автор придерживается первой из них, и потому дальнейшее изложение раздела основано на теории пластического потенциала.
Воснову теории пластического течения положен ассоциированный закон течения, который устанавливает связь между приращениями скоростей
|
|
|
|
|
деформаций d ij |
и напряжениями ij при пластическом деформировании |
в виде |
|
|
|
|
|
d • ij d |
g |
0 . |
(13.7) |
|
ij |
|
|
|
|
В выражении (13.7) d является |
неопределённым |
множителем, а |
функцияg ij представляет собой в общем случае функцию нагружения*
или пластический потенциал. Таковым, например, в случае пластичности сечения идеального двутавра служит условие текучести вида (13.5). Очевидно, точкам поверхности нагружения или кривой пластичности в случае плоского напряжённого состояния соответствует пластическое течение, а упругому состоянию – точки, лежащие внутри поверхности или кривой.
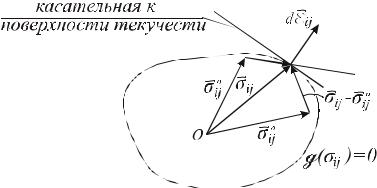
Законутеченияможнодатьпростоегеометрическоеистолкование. Если условие текучести g( ij) представить в виде некоторой поверхности в
(шестимерном) пространстве компонент тензора напряжений ij , а тензору
напряжений сопоставить вектор ij, то тогда согласно определению (13.7) векторпластическихдеформаций ij следуетнаправитьпонормаликданной поверхности (рис. 13.11). При этом напряжённое состояние некоторой
* Более подробно со свойствами функций нагружения можно ознакомиться в [8].

частицы тела, соответствующее пластическому, изображается в виде вектора, касающегося границы поверхности g ij . Изображающим
точкам, лежащим внутри поверхности, соответствуют векторы упругих напряжений ij0 .
Рис. 13.11
Ассоциированный закон течения (13.7) является следствием принципа максимума работы пластической деформации, поскольку условием относительного максимума приращения пластической работы ijd ij по
методу Лагранжа служит уравнение
|
|
( ijd ij d g) 0 ; |
(13.8) |
|
ij |
|
|
|
d называют чаще множителем Лагранжа.
Принцип максимума работы пластической деформации, представ-
ленный в форме скалярного неравенства |
|
|
|
( |
0 ) d |
ij |
0 |
, |
(13.9) |
ij |
ij |
|
|
|
указывает на то, что угол между векторами приращения напряжений ( ij – ij0 ) и деформаций ij в процессе пластического деформирования
должен сохраняться острым (см. рис. 13.11). Отсюда вытекает свойство выпуклости поверхности нагружения или текучести.
При наличии угловых точек или рёбер у поверхности текучести вектор пластических деформаций заключён в пределах пространственного угла, образованного нормалями гладких участков поверхности, примыкающих к углу или ребру. Математическим выражением указанного случая будет более общая форма ассоциированного закона течения в виде
|
n |
gk |
|
|
|
d ij d k |
, |
(13.10) |
|
|
|
1 |
ij |
|
где n – число гладких участков поверхности вблизи угла.

13.4. Теоремы теории предельного равновесия
Теорияпредельногоравновесия(ТПР) феноменологически** основывается на том подтвержденном обширными экспериментальными исследованиями и натурныминаблюдениямифакте, чтодлямногихвидовконструкций, изготовленныхизматериалов, обладающихдостаточновыраженнымипластическими свойствами, исчерпание несущей способности проявляется как развитие значительных деформаций и перемещений при практически неизменной нагрузке. График равновесных состояний (называемый также графиком деформирования) припостепенновозрастающемпараметренагрузкирдлятаких конструкций показан на рис. 13.1, где – характерноеперемещение.
Основной задачей ТПР является определение предельного значения параметра нагрузки рТ (по иной терминологии рТ – предельная, или разрушающая, нагрузка, несущаяспособность) безисследованияпроцессадеформирования. Предельное состояние можно рассматривать как состояние, предшествующееразрушению. Поэтому предельное состояние иногда называют состоянием пластического разрушения или потерей несущей способности сооружения.
ВрезультатерешениязадачиТПРвыявляетсясхемаразрушения, нопри этом значения деформаций и перемещений остаются неопределенными. При р=рТ в результате развития зон пластичности в наиболее напряжённых сечениях конструкция утрачивает геометрическую неизменяемость и превращается в своеобразный механизм – механическую систему, обладающую кинематической подвижностью.
С формальной точки зрения ТПР является прикладной областью теории идеальной пластичности, основанной на использовании простейшей аппроксимации свойств реальных пластически деформируемых материалов – модели жесткопластического тела, характеризуемого диаграммой, приведенной на рис. 13.2,a.
Основные теоремы теории предельного равновесия впервые сформулированы А.А. Гвоздевым в 1936 году. Для их доказательства вводятся понятиястатическивозможныхполейнапряженийикинематическидопустимых полей скоростей перемещений.
Определение 1.
Статическивозможнымназываетсяраспределение(поле) напряжений или внутренних усилий ij0 , удовлетворяющее:
а) уравнениям равновесия
ij0 0 ;xi
** Феномен – философское понятие, обозначающее явление, данное нам в опыте, чувственном познании (в противоположность ноумену, постигаемом разумом и составляющем основу, сущность феномена).
б) статическим граничным условиям
ij0 ni X nj
(здесь индексы отличаются от обозначений, принятых в работе [8]) при заданных воздействиях Xnj на поверхности деформируемого твёрдого
тела;
в) и условию g ij 0 .
З а м е ч а н и е . Принцип максимума работы пластической деформации с использованием определения 1 формулируется следующим образом: приращение работы пластической деформации ij d ij имеет максимальное значение для действительного
напряжённого состояния по сравнению с любым статически возможным.
Статическая теорема ТПР:
Нагрузка, соответствующая статически возможному состоянию, меньше, чем предельная.
В соответствии с принципом возможных перемещений для действительного напряжённого состояния произвольного объёма тела (рис. 13.12) можно записать
Хni ids ij ijdV . S V
Рис. 13.12
Аналогично, для любого статически возможного состояния того же объёма справедливо равенство
Хni0 ids 0ni ijdV . S V
Вычитая из первого равенства второе
(Хni Хni0 ) ids ( ij 0ni ) ijdV S V
и принимая во внимание неравенство (13.11), легко установить, что
(Хni Хni0 ) ids 0 S
или
Хni0 ids Хni ids , S S
т.е. мощность нагрузки, отвечающей статически возможному состоянию, на действительных скоростях перемещений меньше мощности действительной нагрузки на тех же скоростях.
Еслинагрузкиявляютсясосредоточеннымисилами Хni Pi , тосогласно полученному неравенству
При действии единственной нагрузки Р должно соблюдаться неравенство
P0 P .
При определении предельной величины нагрузки необходимо рассмотреть различные статически возможные состояния тела или сооружения в целом и вычислить нагрузки, вызывающие эти состояния. Наибольшее значениеоднойизнихбудетближевсего соответствоватьпредельному состоянию или исчерпанию несущей способности сооружения. В общем случае достаточно рассмотреть какое-либо одно статически возможное состояние сооружения и максимизировать значение нагрузки, отвечающей этому состоянию, например, с помощью методов линейного программирования [8].
Метод определения предельной нагрузки путём рассмотрения статически возможных состояний сооружений называется статическим. С его помощью определяется нижняя граница значения предельной нагрузки.
Определение 2.
Кинематически допустимым называется распределение (поле) скоростей перемещений ui i 1,2,3 или деформаций, удовлетворяющее:
1) условиям непрерывности
|
* |
|
1 |
|
u |
|
|
u j |
|
|
|
|
|
|
|
i |
|
|
|
, |
|
2 |
|
x |
|
ij |
|
|
x |
j |
|
|
|
|
|
|
|
|
|
|
i |
|
|
2) заданным условиям совместности деформаций и кинематическим граничным условиям на поверхности тела.
Кинематическая теорема ТПР:
Нагрузка, соответствующая кинематически допустимому полю скоростей, больше, чем предельная.
Рассматривая работу напряжений действительного состояния произвольного объёма тела на кинематически допустимых перемещениях (рис. 13.13) в соответствии с принципом возможных перемещений, можно утверждать, что
Хni *i ds ij *ijdV . S V
Рис 13.13
Правую часть данного равенства легко преобразовать, воспользовавшись определениемкинематическивозможногонапряжённого состояния тела
Хni *i ds *ij *ijdV ( *ij ij ) *ijdV . S V V
Здесь *ij - напряжения, соответствующие кинематически допустимым
перемещениям, которые могут и не удовлетворять условиям равновесия тела.
Так как в соответствии с принципом максимума работы пластической деформации справедливо неравенство (13.11), то
( *ij ij ) *ij 0 .
С учётом данного обстоятельства преобразованное равенство принимает форму неравенства вида
*ij *ijdV Хni *i ds , V S
где *ij *ijdV представляетсобоймощностьвнутреннихнапряженийвкине-
V
матически допустимом состоянии тела.
Конечно, всегда можно подобрать нагрузку таким образом, что её мощность на кинематически допустимом поле перемещений будет равна мощности соответствующих напряжений, т.е.
Хni* *i ds *ij *ijdV . S V
Тогда с учётом предыдущего неравенства будет сохраняться неравенство следующего вида:
Хni* *i ds Хni *i ds ,
SS
всоответствии с которыммощность нагрузки, отвечающей кинематически
допустимомому состоянию тела на кинематически допустимом поле скоростей перемещений, всегда больше мощности действительной нагрузки на тех же скоростях.
При действии только сосредоточенных сил, очевидно,
n |
n |
*i . |
Pi* *i |
Pi |
1 |
1 |
|
|
209 |
|

При действии единственной силы Р должно соблюдаться неравенство
P* P .
Метод вычисления предельной нагрузки с помощью полученной формулы называется кинематическим.
Как и в случае применения статического метода, здесь на основе какойлибо одной вероятной схемы механизма разрушения, т.е. кинематически допустимого поля скоростей перемещений сооружения, путём минимизации значения нагрузки, отвечающей этому полю, например, методом линейного программирования можно найти точную её величину [2, 13].
Если при определении несущей способности сооружения использовать оба метода, то можно дать двустороннюю оценку величины предельной нагрузки
P0 P Р* .
В следующих подразделах подробно излагается методика определения предельной нагрузки для сферических оболочек на основе теорем теории предельного равновесия.
13.5. Уравнения состояния сферических оболочек
Напряженно-деформированное состояние упругих тонких оболочек в общем случае характеризуется совокупностью трёх групп уравнений, в целом составляющих 17 уравнений, среди которых:
I. Пять уравнений равновесия:
Х 0, N1В N2 В 1А SA2 Q1k1AB ABp1 0 ,
Y 0 , N2 A N1 A B1 SB2 Q2k2 AB ABp2 0,
|
|
|
|
1 |
|
|
|
|
|
|
|
|
Z 0 , k1N1 |
k2 N2 |
|
|
|
|
Q1В |
|
Q2 A |
p3 |
0 , |
|
|
|
|
|
|
|
AB |
|
|
|
|
M x 0 , B1 HB2 M2 A M1 A Q2 AB 0,
M y 0, 1A HA2 M1B M2 B Q1AB 0.
II. Шесть геометрических зависимостей между перемещениями и деформациями:
|
|
1 u |
|
|
1 A |
|
|
w |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
AB |
R |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
1 |
|
|
1 |
B u |
|
w |
, |
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
AB |
|
|
R2 |
|
|


