

2545
.pdfКонечный элемент на рисунке показан до и после деформации. Учитывая, что углы поворота в начальной i и конечной j точках стержня не меняются при преобразовании координат, получим:
ui ui cos vi sin ; vi ui sin vi cos; i i . (10.50) u j u j cos vj sin ; vj u j sin vj cos; j j .
В матричной форме эти зависимости можно записать в виде:
U TU ,
где
U ui vi i u j |
vj |
j T , |
|
||||
U ui |
vi i u j vj |
j T , |
|
||||
c |
s |
0 |
0 |
0 |
0 |
|
|
s |
c |
0 |
0 |
0 |
0 |
|
|
|
0 |
0 |
1 |
0 |
0 |
|
|
|
0 |
, |
|||||
T |
0 |
0 |
0 |
c |
s |
|
|
|
0 |
|
|||||
|
0 |
0 |
0 |
s |
c |
0 |
|
|
0 |
0 |
0 |
0 |
0 |
|
|
|
1 |
|
|||||
Т– матрица преобразования координат. Из соотношения (10.51) находим:
U T 1U .
(10.51)
(10.52)
(10.53)
(10.54)
Матрица преобразования координат является ортогональной матрицей,
т.е.
T 1 TT . |
(10.55) |
Следовательно, |
|
U TT U . |
(10.56) |
Значение энергии не зависит от выбранной системы координат, т.е.
|
1 T |
1 |
T |
|
|
|
2U K U |
2U |
|
KU , |
(10.57) |
где K – |
матрица жесткости в локальной системе координат; |
|
|||
K – |
матрица жесткости в глобальной или общей системе координат. |
||||
Но |
(U )T (TU )T (U TTT ). |
|
|||
|
(10.58) |
||||
С учетом (10.58) соотношение (10.57) можно переписать в виде |
|
||||
|
1U TTT K TU |
1U T KU. |
(10.59) |
||
|
2 |
2 |
|
|
|
271
Сравнивая левую и правую части уравнения (10.59), находим правило преобразования матрицы жесткости при изменении системы координат:
K TT K T. |
(10.60) |
Перед выполнением операции суммирования векторов перемещений и узловых нагрузок они преобразовываются к общей системе координат. Для i-го элемента эти преобразования имеют вид:
T |
|
|
|
|
Ui Ti |
Ui , |
(10.61) |
||
P T T P. |
|
|||
|
||||
i i |
i |
|
|
|
|
|
|||
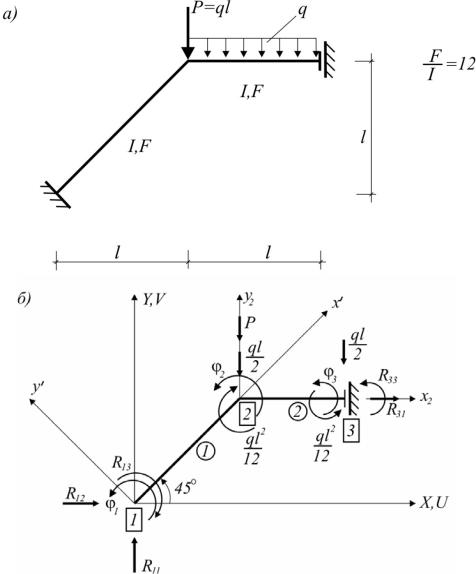
Пример № 3. Произвести расчет рамы, изображенной на рис. 10.10,а.
Рис. 10.10
272
Вектор угловых перемещений 1-го элемента: U1T u1v1 1 u2v2 2 . Для второгоэлемента: U2T u2v2 2 u3v3 3 . Векторперемещенийрамнойсистемы:
U T u1v1 1 u2v2 2 u3v3 3 .
Матрица жесткости 1-го элемента получается как комбинация двух ранее полученных матриц жесткости (10.19) при 0 и (10.49):
|
EF |
|
|
|
0 |
|
|
0 |
|
|
EF |
|
|
0 |
|
|||
|
|
l |
|
|
|
|
|
|
|
l |
|
|
|
|||||
|
|
1 |
|
|
|
|
12EI |
|
6EI |
|
|
1 |
|
12EI |
||||
|
|
0 |
|
|
|
|
|
|
|
0 |
|
|||||||
|
|
|
|
|
|
3 |
|
2 |
|
|
|
|
3 |
|||||
|
|
|
|
|
|
|
|
l1 |
|
l1 |
|
|
|
|
|
l1 |
||
|
|
|
|
|
|
|
|
|
|
|
4EI |
|
|
0 |
|
6EI |
||
|
|
|
|
|
|
|
|
|
|
|
l 3 |
|
|
l |
2 |
|||
|
k1' |
|
|
|
|
|
|
|
|
|
1 |
|
EF |
|
|
1 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
симметрично |
|
|
|
|
12EI |
||||||||
|
|
|
|
|
|
|
|
|
|
|
l 3 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Учитывая, что l |
|
l / |
|
2 |
l 2, |
F 12, получаем: |
||||||||||||
|
|
|
||||||||||||||||
|
|
|
1 |
|
|
2 |
|
|
I |
|
|
|
|
|
|
|
||
|
6 2l2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
0 |
|
|
|
0 |
|
6 2l2 |
|
|
0 |
|
|||||
|
|
|
|
3 2 |
|
|
|
3l |
|
|
|
0 |
3 |
2 |
||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
2 2l2 |
|
|
|
0 |
|
3l |
||
k' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
6 |
2l2 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
симметрично |
|
|
|
3 |
2 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
0 |
|
0 |
12l |
2 |
|
|
0 |
|
|
|
|
12l |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
12 |
|
6l |
0 |
|
|
12 |
||
|
|
|
|
|
|
|
|
|
|
|
|
4l |
2 |
0 |
|
|
6l |
|
|
k2' k2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
12l2 |
|
|
|
0 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
симметрично |
|
|
|
|
|
12 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
6EI |
|
|
|
||
|
2 |
|
|
l1 |
|
2EI |
|
|
|
l1 |
|
|
. |
|
|
0 |
|
|
|
|
|
6EI |
|
l 2 |
|
|
|
1 |
|
4EI |
|
|
|
l1 |
|
|
|
|
0 |
|
|
|
3l |
|
|
|
|
|
|
|
2l2 |
EI |
; |
|
0 |
|
l3 |
|
|
|
|
|
3l |
|
|
|
2 2l2 |
|
|
|
|
|
|
|
|
|
|
|
0
6l
2l2 EI .
0 l3 6l
4l2
273
Матрица преобразования координат для первого стержня имеет вид:
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
0 |
0 |
|
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|||||||
с |
s |
0 |
0 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
0 |
|
|
|
0 |
|
|
0 |
|
|
0 |
0 |
||||
|
|
|
|
2 |
|
|
2 |
|
|
|||||||||||
s с 0 0 |
0 |
|
|
|
1 |
|
|
0 |
|
|
0 |
|
||||||||
|
0 |
0 |
1 |
0 |
0 |
0 |
|
0 |
|
|
0 |
|
|
|
|
0 |
||||
T |
0 |
0 |
0 |
с |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
2 |
. |
|
|
s 0 |
|
0 |
|
|
0 |
0 |
|
|
|
|
0 |
||||||||
0 |
0 |
0 |
s |
|
|
|
|
2 |
|
|
2 |
|||||||||
|
с |
0 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
0 |
0 |
0 |
0 |
0 |
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
||
|
1 |
|
0 |
|
|
0 |
0 |
|
|
0 |
||||||||||
|
|
|
|
|
|
|
2 |
|
|
2 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
0 |
|
|
0 |
0 |
|
|
0 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
||||||
Тогда матрица жесткости первого стержня в глобальной системе координат примет вид:
|
|
|
3 2 |
l2 |
|
1 |
3 2 |
l2 |
1 |
3 2 l |
3 2 |
l2 |
1 |
3 2 l2 |
|
1 |
3 2 l |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
3 2 |
|
2 |
|
1 |
|
3 2 |
l |
3 2 |
|
|
2 |
|
1 |
|
|
|
|
2 |
|
1 |
3 2 |
l |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
l |
|
2 |
|
2 |
l |
|
|
|
|
3 2 l |
|
|
|
|
|
2 |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 2 l |
|
|
|
|
|
3 2 l |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
k1 T |
T |
' |
|
|
|
|
|
|
|
|
|
|
|
2 2l2 |
|
|
|
|
|
|
|
|
|
2l2 |
|
EI |
||||||||||||||||
|
k1T |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
l |
3 . |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
3 |
2 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
симметрично |
|
|
2 |
|
3 |
2 |
2 |
|
l |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
3 2 l |
|
|
2 |
|
l |
|
|
2 |
|
|
2 |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
2 |
|
2 |
|
1 |
|
|
3 |
2 |
l |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
2 |
|
|
2 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
2l |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Поскольку локальная система координат элемента 2 совпадает с универсальной системой, то матрицу жесткости элемента 2 не следует тран-
сформировать (k2 k2' ) .
Матрица жесткости K образуется внесением на соответствующие позиции элементов матриц k1 и k2 , их суммированием Ki j ki j , когда в
каждой ячейке появятся элементы обеих матриц:
274
3 2 |
l2 |
|
1 |
3 2 |
l2 |
1 |
3 2 l |
3 2 |
l2 |
1 |
|
3 2 |
l2 |
1 |
|
3 2 l |
0 |
|
|
0 |
0 |
|
|
|||||||||||||||||||||||
|
|
|
2 |
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
2 |
|
1 |
|
3 2 |
|
|
|
|
|
|
2 |
|
|
1 |
|
|
|
|
|
|
2 |
|
|
1 |
|
|
3 2 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
3 2 |
|
l |
3 2 |
|
|
|
3 2 |
|
|
|
|
l |
0 |
|
|
0 |
0 |
|
|
||||||||||||||||||||||
|
|
|
|
l |
|
2 |
|
2 |
l |
|
2 |
|
|
l |
|
|
|
|
|
2 |
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
2 2l2 |
|
3 2 l |
|
|
|
|
|
3 2 l |
|
|
|
2 l2 |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
0 |
0 |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
1 |
|
|
|
|
2 |
|
|
2 |
|
|
1 |
|
|
3 2 |
|
|
|
2 |
|
|
|
EI |
|||||||
K |
|
|
|
|
|
|
|
|
|
|
|
|
3 2 l |
|
|
2 |
|
12l |
|
3 2 |
l |
|
|
|
|
|
|
|
2 |
|
l |
12l |
|
0 |
0 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
l |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
3 2 |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
симметрично |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
12 |
|
l |
6l |
0 |
|
|
12 |
6l |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 2 l |
|
|
|
|
2 |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 2l2 4l2 |
0 |
|
|
6l |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2l2 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12l |
2 |
0 |
0 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 6l |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4l |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Узловые силы рамной системы складываются из внешних нагрузок и реакций:
|
|
|
0 R11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
0 R12 |
|
|
|
|
|
0 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
0 R13 |
|
|
|
|
|
0 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
2 |
ql P |
|
1,5 |
|
||||||||||||||
|
|
|
|
|
|
|||||||||||||||
P |
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
ql |
R |
. |
|||
|
|
|
ql2 |
|
|
|
|
|
|
|
|
l |
||||||||
|
|
12 |
|
|||||||||||||||||
|
|
|
||||||||||||||||||
|
|
|
12 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
0 R31 |
|
|
|
|
0 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
1 ql |
|
|
|
0,5 |
|
||||||||||
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
l |
|
|
|||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
ql2 R |
|
|
12 |
|
|
|
|
|
|||||||||||
|
|
|
|
|
||||||||||||||||
12 |
|
|
|
|
33 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Заменяя в матрице K и векторе P длину l на 4 и разделяя систему уравнений KU P согласно неизвестным, а также известным величинам в векторе параметров перемещений, получаем следующую систему уравнений:
275
|
262,004 |
65,761 |
8, 485 |
0 |
| |
70,004 |
65,761 |
8,845 |
192 |
|
|
|
65,761 |
82,004 |
15,515 |
12 |
| |
65,761 |
70,004 |
8, 485 |
0 |
|
|
8, 485 |
15,515 |
109, 255 |
24 |
| |
8, 485 |
8, 485 |
22,627 |
0 |
|
|
|||||||||
|
|
0 |
12 |
24 |
12 |
| |
0 |
0 |
0 |
0 |
|
|
|||||||||
EI |
| |
|
||||||||
l3 |
|
|
65,761 |
8, 485 |
0 |
| |
70,004 |
65,761 |
8, 485 |
0 |
70,004 |
||||||||||
|
|
65,761 |
70,004 |
8, 485 |
0 |
| |
65,761 |
70,004 |
8, 485 |
0 |
|
|
8, 485 |
8, 485 |
22,627 |
0 |
| |
8, 485 |
8, 485 |
45, 255 |
0 |
|
|
|||||||||
|
|
192 |
0 |
0 |
0 |
| |
0 |
0 |
0 |
192 |
|
|
|||||||||
|
0 |
24 |
32 |
24 | |
0 |
0 |
0 |
0 |
||
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
1,5 |
|
|
0 |
|
|
|
|
|
||
0,33 |
|
0 |
|
||
|
0,5 |
|
|
0 |
|
|
|
|
|
||
|
|
|
|
|
|
|
ql |
. |
|||
|
0 |
|
R11 |
|
|
|
0 |
|
R |
|
|
|
|
|
|
11 |
|
|
0 |
|
R13 |
|
|
|
0 |
|
R |
|
|
|
0,33 |
|
|
31 |
|
|
|
R |
|
||
|
|
|
|
33 |
|
0 |
u2 |
|
|
|
24 |
v |
|
|
|
|
|
2 |
|
|
32 |
|
2 |
|
|
24 |
|
|
|
|
v3 |
|
|
||
|
|
|||
0 |
|
|
|
|
u1 |
|
|
||
0 |
|
v |
|
|
|
|
1 |
|
|
0 |
|
1 |
|
|
0 |
u |
|
|
|
64 |
|
3 |
|
|
|
|
|
|
|
|
|
3 |
|
|
Решая систему из четырех линейных алгебраических уравнений с четырьмя неизвестными
262,004 |
65,761 |
8,485 |
0 |
|
u2 |
|
|
0 |
|
|
82,004 |
15,515 |
12 |
v |
|
|
1,5 |
|
|
EI |
|
109,255 |
|
|
2 |
|
|
|
ql , |
l3 |
|
24 |
2 |
|
0,333 |
||||
|
|
|
12 |
|
v |
|
|
0,5 |
|
|
|
|
|
|
3 |
|
|
|
|
получаем значения неизвестных параметров перемещений в узлах системы:
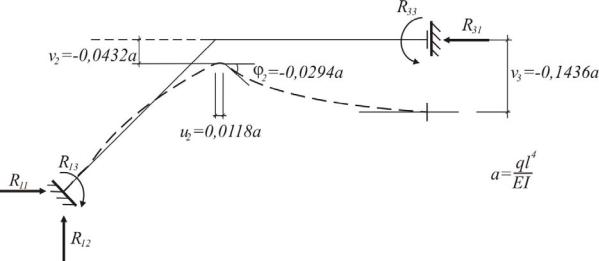
u2 |
|
|
|
0,0118 |
|
|
|
v |
|
|
0,0432 |
|
4 |
||
2 |
|
|
|
|
ql |
|
|
2 |
|
0,0294 |
EI . |
||||
v |
|
|
|
0,1436 |
|
|
|
3 |
|
|
|
|
|
|
|
276
Затем определяем реакции опор:
R11 |
|
70,004 |
65,761 |
8,485 |
|
R |
|
|
65,761 |
70,004 |
8,485 |
12 |
|
|
8,485 |
8,485 |
22,627 |
R13 |
|
|
|||
R |
|
|
192 |
0 |
0 |
31 |
|
|
|
|
|
R |
|
|
0 |
24 |
32 |
33 |
|
|
|
|
|
0 |
|
|
0,0118 |
|
|
0 |
|
0 |
|
|
0 |
|
|||
|
|
|
|
|
|
||
0 |
|
0,0432 ql |
0 |
ql; |
|||
0 |
|
0,0294 |
|
0 |
|
||
|
|
0,1436 |
|
|
|
||
|
|
|
|
|
|
|
|
24 |
|
|
|
0,333 |
|||
Рис. 10.11. Схема перемещений рамы
Реакции, соответственно, равны:
R11 |
|
|
2,264 |
|
R |
|
|
2,000 |
|
12 |
|
|
|
|
R13 |
|
|
0,198 ql. |
|
R |
|
|
2,265 |
|
31 |
|
|
|
|
R |
|
|
1,136 |
|
33 |
|
|
|
|
Полученные значения параметров перемещения, реакции опоры, диаграммы перемещений и момента изгиба показаны на рис.10.11.
277
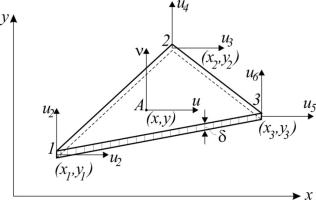
10.8. Решение плоской задачи теории упругости МКЭ. Треугольный элемент
Рассмотрим элемент в виде произвольного треугольника (рис.10.12).
Рис. 10.12
Поле перемещений точек A(x, y) треугольника зададим в виде
полиномов, число неизвестных коэффициентов которых (шесть) равно числу степеней свободы элемента.
u (x, y) a bx cy; |
(10.62) |
|||||||
v(x, y) d ex |
fy. |
|||||||
|
||||||||
Вектор узловых перемещений имеет вид: |
|
|
|
|||||
U u u |
2 |
u u |
4 |
u u |
T . |
(10.63) |
||
1 |
3 |
5 |
6 |
|
|
|||
Выразим поле перемещений через перемещения узловых точек треугольника. Получим 6 уравнений:
u1 a bx1 cy1; |
|
|
u3 a bx2 cy2; |
|
|
u5 a bx3 cy3; |
(10.64) |
|
u2 d ex1 fy1; |
||
|
||
u4 d ex2 fy2; |
|
|
u6 d ex3 fy3. |
|
Сделаем следующие обозначения. Площадь треугольника обозначим F. Выразив ее через координаты вершин треугольника, получим:
F |
1[(x |
x )( y |
y ) ( y |
2 |
y )(x |
x )]. |
(10.65) |
|||
|
2 |
2 |
1 |
3 |
1 |
1 |
3 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
278

Разности координат отдельных вершин обозначим следующим
образом: |
|
|
c1 s2 y3 y2; |
|
|
c2 s1 x2 x3; |
|
|
c3 s4 y1 y3; |
(10.66) |
|
c4 s3 x3 x1; |
||
|
||
c5 s6 y2 y1; |
|
|
c6 s5 x1 x2. |
|
Решив систему уравнений для узловых перемещений (10.64) относительно коэффициентов b,c,e и f , получим:
b (c1u1 c3u3 c5u5 ) / (2F); |
|
|
c (s1u1 s3u3 s5u5 ) / (2F); |
(10.67) |
|
e (s2u2 s4u4 s6u6 ) / (2F); |
||
|
||
f (c2u2 c4u4 c6u6 ) / (2F). |
|
Используя уравнения для поля перемещений (10.62), построим поле деформаций. Относительные удлинения и относительный сдвиг можно записать в виде:
x u b;x
y v f ; (10.68)y
xy u v c e.y x
Эти деформации вызывают растягивающие напряжения x , y в направлении осей x и y, а также касательное напряжение xy . Зависимость между этими напряжениями и деформациями описывается законом Гука:
|
x |
2G |
( x y ) |
|
1 |
||
|
|
|
|
|
y |
2G |
( y x ) |
|
1 |
||
|
|
|
|
|
xy G xy G(c e), |
||
где G – |
модуль сдвига; |
|
|
– |
коэффициент Пуассона. |
||
2G (b f );
1
2G ( f b); (10.69)
1
279
Модуль сдвига связан с модулем упругости Е соотношением
|
G |
|
E |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
(10.70) |
||
|
2(1 ) |
|
|
|
|
|
|
|
|
|
|
|
||||||||
В единице объема элемента заключена упругая энергия, равная |
|
|||||||||||||||||||
1 ( x x |
y y xy xy ), |
|
|
|
|
|
(10.71) |
|||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а поскольку элемент имеет толщину |
и объем |
F , то потенциальная |
||||||||||||||||||
энергия всего элемента n будет равна: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
V |
1 F( |
|
x |
|
y |
|
y |
|
xy |
|
xy |
) |
|
|
|
|||||
п |
2 |
x |
|
|
|
|
|
|
|
|
|
|
|
. (10.72) |
||||||
GF |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
||||
|
|
|
|
|
b) |
(c e) |
|
|||||||||||||
b(b f ) f ( f |
|
|
2 |
|
|
. |
|
|||||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Подставляя выражения b,c,e и f , получаем:
|
|
|
6 |
6 |
|
|
|
|
|
Vn |
1 kijuiu j , |
|
(10.73) |
||
|
|
|
2 i 1 |
j 1 |
|
|
|
или в матричной форме |
|
|
|
|
|
|
|
|
|
V 1U T k U. |
|
|
(10.74) |
||
|
|
n |
2 |
n |
|
|
|
|
|
|
|
|
|
|
|
Можно проверить, что коэффициенты kij , |
представляющие собой эле- |
||||||
менты матрицы жесткости kn , описываются уравнением |
|
||||||
k |
G 1 ( 1)i k c c |
s s |
. |
(10.75) |
|||
ij |
|
|
|
i k |
i |
k |
|
|
4F 1 |
|
|
|
|
|
|
Потенциальная энергия деформации всей конструкции равна сумме упругих энергий ее элементов
N |
N |
1 |
U |
T |
kn U |
1 |
U |
T N |
|
1 |
U |
T |
KU , |
(10.76) |
V Vn |
2 |
|
2 |
kn U |
2 |
|
||||||||
n 1 |
n 1 |
|
|
|
|
n 1 |
|
|
|
|
|
|||
где K матрица жесткости всей конструкции, представляющая собой сумму матриц жесткости ее элементов,
N |
|
K kn . |
(10.77) |
n 1
280