10.4. Пример расчета фермы МКЭ
Пример . Произведем расчет фермы МКЭ (рис. 10.4)
Рис. 10.4
Вектор перемещений данной системы имеет вид:
|
|
|
|
|
и и и |
2 |
и и |
4 |
и и |
6 |
и |
7 |
и |
T . |
|
|
|
|
|
|
|
|
|
1 |
3 |
|
|
5 |
|
|
8 |
|
|
|
|
|
|
|
Примем EFi |
/ li 2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Матрицы жесткости отдельных элементов можно записать в виде |
следующих таблиц: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
II |
|
|
|
|
|
|
|
|
|
III |
|
|
|
1 |
2 |
3 |
4 |
|
|
|
|
|
3 |
4 |
|
|
5 |
|
6 |
|
|
|
3 |
4 |
7 |
8 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
0 |
-2 0 |
|
|
3 |
|
|
2 |
0 |
|
|
-2 0 |
|
|
3 |
0 |
0 |
0 |
0 |
2 |
0 |
0 |
0 |
0 |
4 |
|
|
0 |
0 |
|
|
0 |
|
0 |
|
4 |
0 |
2 |
0 |
-2 |
3 |
-2 0 |
2 |
0 |
5 |
|
|
-2 0 |
|
|
2 |
|
0 |
|
7 |
0 |
0 |
0 |
0 |
4 |
0 |
0 |
0 |
0 |
6 |
|
|
0 |
0 |
|
|
0 |
|
0 |
|
8 |
0 |
-2 0 2 |
|
|
IV |
|
|
|
|
|
V |
|
|
|
1 |
2 |
7 |
8 |
|
|
5 |
6 |
7 |
8 |
|
|
|
1 |
1 |
1 |
-1 -1 |
|
5 |
1 |
-1 -1 |
1 |
2 |
1 |
1 |
-1 -1 |
6 |
-1 |
1 |
1 |
-1 |
7 |
-1 -1 |
1 |
1 |
7 |
-1 |
1 |
1 |
-1 |
8 |
-1 -1 |
1 |
1 |
8 |
1 |
-1 -1 |
1 |
Матрица жесткости фермы представляет собой сумму матриц жесткостей её элементов:
|
|
1 |
2 |
3 |
|
4 |
5 |
6 |
7 |
8 |
1 |
3 |
1 |
-2 0 |
|
0 |
0 |
-1 -1 |
2 |
1 |
1 |
0 |
0 |
|
0 |
0 |
-1 -1 |
3 |
-2 0 |
4 |
0 |
|
-2 0 |
0 |
0 |
K= 4 |
0 |
0 |
0 |
2 |
|
0 |
0 |
0 |
-2 |
5 |
0 |
0 |
-2 0 |
|
3 |
-1 -1 1 |
6 |
0 |
0 |
0 |
0 |
|
-1 1 |
1 |
-1 |
7 |
-1 -1 0 |
0 |
-1 1 |
2 |
0 |
8 |
|
-1 -1 |
0 |
-2 |
1 |
-1 |
0 |
4 |
Рис. 10.5
Уравнения равновесия можно записать в виде:
Р1 3и1 1и2 2и3 0и4 0и5 0и6 1и7 1и8;
Р3 1и1 1и2 0и3 0и4 0и5 0и6 1и7 1u8;
Р3 2и1 0и2 4и3 0и4 2и5 0и6 0и7 0и8; Р4 0и1 0и2 0и3 2и4 0и5 0и6 0и7 2и8;
Р5 0и1 0и2 2u3 0и4 3и5 1и6 1и7 1и8;
Р6 0и1 0и2 0и3 0и4 1и5 1и6 1и7 1и8; Р7 1и1 1и2 0и3 0и4 1и5 1и6 2и7 0и8; Р8 1и1 1и2 0и3 2и4 1и5 1и6 0и7 4и8.
При этом вектор |
|
|
|
|
P1 |
|
|
0 R1 |
|
P2 |
|
100 R |
|
|
|
|
2 |
|
P3 |
|
|
0 |
|
|
|
|
100 |
|
P4 |
|
|
|
P P |
|
|
0 |
. |
5 |
|
|
|
|
P |
|
|
100 R |
|
6 |
|
|
6 |
|
P7 |
|
|
0 |
|
P |
|
|
0 |
|
8 |
|
|
|
|
Для вычисления перемещений и3, и4, и7, и8 систему уравнений перепишем в виде:
Р3 2и1 0и2 4и3 0и4 2и5 0и6 0и7 0и8;Р4 0и1 0и2 0и3 2и4 0и5 0и6 0и7 2и8;Р7 1и1 1и2 0и3 0и4 1и5 1и6 2и7 0и8;
Р8 1и1 1и2 0и3 2и4 1и5 1и6 0и7 4и8.
Здесь и1 = и2 = и6 =0, и5=1.
Подставив Pi и иi , получим следующий вид системы уравнений:
2 4и3 0и4 0и7 0и8;100 0и3 2и4 0и7 2и8;1 0и3 0и4 2и7 0и8;
1 0и3 2и4 0и7 4и8.
Откуда
и3=0,5; и7 =0,5; и8=-50,5; и4=-100,5.
Определение усилий в элементах производится по формуле
N EFl l EFl [(u2 u1)c (v2 v1)s].
Например, для стержня IV получим:
N 2[(u7 u1)0,707 (u8 u2 )0,707]
2 0,5 0,707 ( 50,5) 0,707 70,7.
10.5. Расчет МКЭ конструкций из изгибаемых элементов стержневого типа
Перемещения изгибаемой балки определяются перемещениями w1 и w2 и углами поворота 1 и 2 оси балки на концах (рис. 10.6).
Рис. 10.6
Сгруппируем их в вектор обобщенных перемещений:
w1
U 1 . (10.39)w
22
Прогиб оси балки в точке А, лежащей на расстоянии x от конца балки, описывается полиномом третьей степени
Этот полином является точной формулой прогиба балки, если принять, что силы и моменты действуют только на ее концах. Коэффициенты а, в, с,
d полинома определяются из граничных условий |
|
w(0) w1; w (0) 1; w(l) w2; w (l) 2 . |
(10.41) |
Подставив граничные условия в уравнение (10.30), получим систему |
уравнений: |
|
|
|
|
w1 a; |
|
|
|
|
1 в; |
|
|
|
|
|
|
|
(10.42) |
w a bl cl2 dl3 |
; |
2 |
|
|
|
|
2 b 2cl 3dl |
2 |
. |
|
|
|
|
|
Решение этой системы имеет вид:
|
|
|
|
|
a w1; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b 1; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(10.43) |
|
|
|
|
|
с ( 3w |
|
2 l 3w |
2 |
l) / l |
2; |
|
|
|
|
|
|
|
|
1 |
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d (2w |
l |
2w |
|
2 |
l) / l3. |
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
Кривизна изогнутой оси стержня определяется выражением |
|
|
|
|
|
|
w 2c 6dx 2(c 3dx). |
|
|
|
(10.44) |
Ее вызывает изгибающий момент |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M g EJ 2EJ (c 3dx). |
|
|
|
|
(10.45) |
Упругая энергия изгиба балки при статическом нагружении запи- |
сывается в виде: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V 1 l |
M g |
dx |
1 l 4EJ (c 3dx)2 dx |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(10.46,а) |
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2EJ (c2 |
6c d x 9d 2 x2 )dx 2EJ (c2l 3cdl2 3d 2l3 ). |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
После подстановки значений c и d из (10.33) и преобразований |
получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
2EJ |
3w12 3 lw1 1 6w1w2 |
3 lw1 2 l2 12 |
|
(10.46,б) |
|
l3 |
|
3 |
l w l2 3w2 |
3 lw l |
2 2 |
. |
|
|
|
|
|
|
|
|
|
1 |
2 |
|
1 |
2 |
|
2 |
|
|
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
Это выражение можно записать в матричной форме |
|
|
|
|
|
|
|
|
|
V |
1U T |
k U , |
|
|
|
|
|
|
|
|
|
(10.47) |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где k – матрица жесткости балки, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
3l |
6 |
|
|
|
3l |
|
|
|
|
|
|
|
|
|
|
|
2EJ |
|
3l |
|
2l |
2 |
3l |
|
|
|
l |
2 |
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
. |
|
|
(10.48) |
|
|
|
|
|
l3 |
6 |
|
3l |
6 3l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3l |
|
l2 |
3l |
|
|
2l2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Формирование матрицы жесткости всей системы и решение системы уравнений МКЭ производятся по тем же правилам, что были использованы при расчете ферм.
Матрица жесткости для элемента с тремя степенями свободы
[сначала (предположим, слева) – жесткий узел, справа – шарнирный узел] будет иметь вид:
3EI |
|
3EI |
|
|
|
l2 |
|
|
l3 |
|
|
|
3EI |
|
|
|
|
|
|
|
3EI |
. |
(10.49,а) |
|
l |
|
|
l2 |
|
|
|
|
|
|
|
|
3EI |
3EI |
|
|
|
|
|
|
|
l |
2 |
|
l |
3 |
|
|
|
|
|
|
|
|
|
|
Если слева – шарнир, а справа – жесткий узел, то матрица жесткости такого конечного элемента имеет вид:
|
|
3EI |
|
3EI |
3EI |
|
|
|
|
|
|
l3 |
l3 |
|
l2 |
|
|
|
|
|
|
3EI |
3EI |
|
|
|
|
|
k |
|
|
|
3EI |
. |
(10.49,б) |
|
|
l3 |
|
l3 |
|
l2 |
|
|
|
|
|
|
|
|
|
|
|
3EI |
|
3EI |
3EI |
|
|
|
|
|
|
|
3 |
|
2 |
|
|
|
|
|
|
|
|
l |
|
|
l |
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
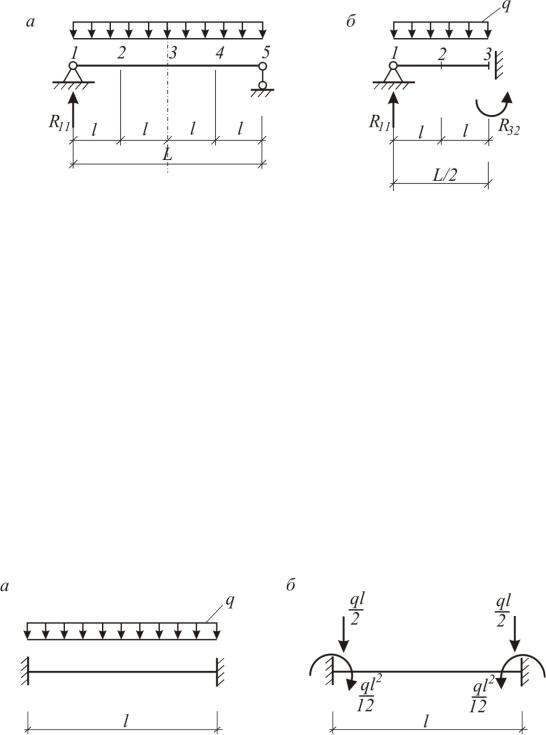
10.6. Пример расчета балки МКЭ
Вычислимперемещениябалки, изображеннойнарис.10.7. Разобьембалкуна четыре конечных элемента одинаковой длины. Поскольку балка и нагрузка на нее симметричны, рассмотрим только половину, т.е. два конечных элемента из
четырех. Матрицыжесткости(безкоэффициента 2lE3I ) приведеныниже:
|
|
w1 |
w1 |
|
6 |
|
|
3l |
1 |
|
|
k1 w |
6 |
2 |
|
3l |
2 |
|
|
|
w2 |
|
|
w2 |
6 |
k2 2 |
3l |
w3 |
|
6 |
3 |
|
3l |
|
|
|
|
|
1 |
w2 |
2 |
|
|
|
3l |
6 |
3l |
|
|
|
2l2 |
3l |
l2 |
|
; |
|
3l |
6 |
3l |
|
|
|
|
l2 |
3l |
2l2 |
|
|
|
|
|
|
2 |
w3 |
3 |
|
|
|
|
|
|
3l |
6 |
3l |
|
|
|
2l2 |
3l |
l2 |
. |
|
3l |
6 |
3l |
|
|
l2 |
3l |
2l2 |
|
|
|
|
|
|
|
|
|
|
|
Рис. 10.7
Матрица жесткости балки (половины) будет иметь вид:
|
|
|
6 |
3l |
6 |
3l |
0 |
0 |
|
|
|
3l |
2l2 |
3l |
l2 |
0 |
0 |
K |
2EI |
6 |
3l |
12 |
0 |
6 |
3l |
|
l3 |
|
3l |
l2 |
0 4l2 |
3l |
l2 |
|
|
|
|
|
|
|
0 |
0 |
6 |
3l |
6 |
3l |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
3l |
l2 |
3l |
2l2 . |
Уравнения равновесия в матричной форме записаны в виде:
KU P .
Здесь вектор Р формируется из приведенных к узлам сил и моментов от равномерно распределенной нагрузки (рис.10.8,а,б):
Рис. 10.8
|
|
1/ 2 |
|
|
|
1/ 2 |
|
|
|
(1/12)l |
P |
|
(1/12)l |
P |
|
ql . |
|
|
ql . |
1 |
|
1/ 2 |
|
2 |
1/ 2 |
|
|
|
|
|
|
(1/12)l |
|
|
|
(1/12)l |
|
|
|
|
|
267 |
|
|
|
Вектор узловых сил для рассчитываемой балки:
|
|
|
|
|
|
|
|
|
|
1/ 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1/12)l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
1 |
|
|
ql R, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/ 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1/12)l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где R – вектор реакций, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R11 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
; R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
0 |
|
|
|
|
2 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
32 |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
0 |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R32 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Итак, уравнение KU P будет иметь вид: |
|
|
|
|
|
|
|
|
|
|
|
|
6 |
3l |
6 |
3l |
|
0 |
|
|
0 |
|
w1 |
|
|
01/ 2 |
|
R11 |
|
|
3l |
2l |
2 |
3l |
l |
2 |
|
0 |
|
|
0 |
|
|
1 |
|
|
(1/12)l |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2EI |
6 |
3l |
12 |
0 6 3l |
|
w2 |
|
|
1 |
|
|
|
|
0 |
|
|
3l |
l2 |
0 |
4l2 |
3l |
|
|
l2 |
|
2 |
|
|
|
0 |
|
|
ql |
0 |
|
l3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
6 |
3l |
|
6 |
|
3l |
|
w |
|
1/ 2 |
|
|
0 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(1/12)l |
|
0 |
0 |
3l |
l |
2 |
3l |
|
2l |
2 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
32 |
|
Исключив уравнения, содержащие реакции, получим: |
|
|
|
|
|
|
|
2l2 |
3l |
|
|
l2 |
|
0 |
|
|
1 |
|
|
(1/12)l |
|
|
|
|
|
|
|
|
|
|
|
3l 12 |
|
|
0 |
|
6 |
|
w |
|
|
|
|
|
1 |
|
|
ql |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
l2 |
0 4l2 |
|
3l |
|
|
2 |
|
|
|
0 |
|
|
2EI |
|
|
|
|
|
|
|
0 |
6 |
|
3l |
|
6 |
|
|
w3 |
|
|
|
1/ 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отсюда
|
|
|
|
|
16 |
|
|
|
|
|
1 |
|
|
|
|
383 |
l |
|
ql |
3 |
|
|
w |
|
|
|
|
|
|
|
2 |
|
|
8 |
|
|
|
. |
|
2 |
|
|
226 |
|
2EI |
w |
|
|
|
|
20 l |
|
|
|
|
|
3 |
|
|
|
|
3 |
|
|
|
|
|
Затем можно определить реакции:
|
|
|
|
|
|
|
|
|
|
163 |
|
|
|
|
|
R |
|
3l |
6 |
3l |
0 |
|
|
38 l |
|
|
1/ 2 |
ql |
11 |
|
0 |
3l |
l3 |
|
|
8 |
q |
|
R32 |
|
|
3 |
|
226 |
|
(1/12)l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
203 l |
|
|
|
|
|
|
|
|
|
R11 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
R |
|
2l |
ql. |
|
|
|
|
|
|
|
|
|
|
32 |
|
|
|
|
|
|
|
|
В случае, когда определять угол поворота балки над левой опорой не надо, можно воспользоваться матрицей жесткости (10.49,б). Тогда вектор
перемещений U v1 v2 |
2 v3 |
3 T . |
|
|
|
|
|
|
Вектор узловых сил |
P |
3ql |
|
9ql |
ql2 |
ql |
ql2 |
T . |
|
|
8 |
|
8 |
24 |
2 |
12 |
|
|
|
|
1.5 |
1.5 |
1.5l |
|
k |
2EI 1.5 |
1.5 |
1.5l |
. |
1 |
l3 |
|
|
|
|
|
|
|
|
|
1.5 |
1.5l |
1.5l |
2 |
|
|
|
|
|
|
Складываем матрицы k1 и k2 . Поскольку перемещения v1 и 3 извест-
ны, определяем перемещения v2 2 v3 . Система уравнений решается в
Mathcad:
Given |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15 w2 |
|
|
3 |
|
|
|
|
12 |
|
|
|
|
|
EI |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
w3 |
|
|
|
|
|
|
9 q |
|
l2 |
|
|
|
l |
|
|
|
|
l2 |
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l2 |
|
|
3 |
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
EI |
|
|
|
|
|
|
|
|
|
w2 7 |
2 |
|
w3 |
|
|
|
|
|
q |
|
|
|
|
|
l |
l |
|
l |
|
|
24 |
|
|
( |
|
|
|
12 |
|
|
|
|
6 |
|
|
|
|
|
12 |
|
|
|
|
|
|
EI |
|
|
|
|
|
|
2 |
|
w2 |
l |
2 |
|
2 |
w3 |
|
|
|
l |
|
q |
|
|
|
l |
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
19 l4 |
|
q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 EI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 l3 |
|
|
|
|
|
|
|
|
|
|
Find(w2 2 w3) |
|
|
|
|
|
q |
|
|
|
|
|
|
|
|
|
|
|
6 EI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 l4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
Результаты решения те же. |
|
|
|
|
|
|
|
|
EI |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10.7. Преобразование координат
Для некоторых конечных элементов матрицы жесткости выводятся в местной системе координат, оси которой ориентированы отлично от общей системы. Поэтому при формировании общей матрицы жесткости, общего вектора перемещений и общего вектора узловых сил необходимо сделать переход от местной к общей системе координат.
Например, для сжато-изогнутого стержня, входящего в состав плоской стержневойсистемы(рис. 10.9), каждыйузелимееттристепенисвободы: u,v, .
Рис. 10.9