

2545
.pdfРис. 5.5
При этом стержни изогнутся и в стержнях появятся усилия (рис.5.5,а,б), а в жесткой заделке (лишней связи) – реакция r11 (рис.5.6).
От внешней нагрузки в дополнительной связи возникнут усилия (рис.5.7, а, б)
R1P m2P m3P.
Рис. 5.7
При повороте узла на действительный угол поворота возникнет реакция r11 Z1.
Рис. 5.6
Z1 в заделке
Но в заданной системе дополнительной связи (заделки) нет. Следовательно, реакция в дополнительной связи от поворота узла и от нагрузки должна быть равно нулю:
r11Z1 R1P 0. |
(5.3) |
|
Это уравнение метода перемещений. Решив его, найдем: |
|
|
Z R1P , |
(5.4) |
|
1 |
r11 |
|
|
|
|
|
111 |
|
или
Z |
m2P m3P |
. |
|
|
|
|
|||
1 |
m1 m2 |
m3 |
|
|
|
|
|||
Теперь исправим единичную эпюру и сложим ее с грузовой: |
|
|||
Mок M1 Z1 |
M P. |
(5.5) |
||
Для построения единичных и грузовой эпюр метода перемещений необходимо знать значения узловых усилий от единичных перемещений и от нагрузки для отдельных балок. Для их расчета используют метод сил.
5.3. Канонические уравнения метода перемещений
Рассмотрим n раз кинематически неопределимую систему. Для расчета этой системы методом перемещений наложим на нее n связей. От единич-
ного перемещения j -й связи Z j 1 в i -й связи появляется реакция rij . От перемещения Z j – реакция rij Z j . От внешней нагрузки в i -й связи возникнет реакция RiP . Сумма реакций от всех узловых перемещений и от
нагрузки в i -й связи |
|
ri1Z1 ri2Z2 ....riiZi ....rinZn RiP 0 |
(5.6) |
должна быть равна нулю, т.к. в заданной системе этой связи нет.
Таким образом, условия равенства нулю реакций в дополнительных связях позволяют записать канонические уравнения метода перемещений:
r11Z1 r12Z2 .... |
r1nZn R1P 0; |
|
|
||||||||
r Z |
r Z |
2 |
.... |
r |
Z |
n |
R |
0; |
|
|
|
21 1 |
22 |
|
|
2n |
|
2P |
|
|
(5.7) |
||
........................................................ |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
r Z |
r |
Z |
2 |
.... |
r Z |
n |
R |
0. |
|
|
|
n1 1 |
n2 |
|
|
nn |
|
nP |
|
|
|
||
В данной системе имеет место равенство |
|
|
|
||||||||
|
|
|
|
rik rki , |
|
|
|
|
|
(5.8) |
|
вследствие чего матрица коэффициентов при неизвестных симметрична. Канонические уравнения метода перемещений, записанные в матрич-
ной форме, имеют вид:
где K – |
KZ R 0, |
(5.9) |
матрица единичных коэффициентов, или матрица внешней |
||
R – |
жесткости системы; |
|
вектор грузовых членов, характеризующий реакции от внешних |
||
|
воздействий в дополнительных связях. |
|
Реакции rik и RiP определяют или из условий равновесия или путем перемножения эпюр.
112
5.4. Составление таблицы реакций метода перемещений
Произведем расчет отдельных статически неопределимых балок на кинематические и грузовые воздействия. Для расчета используем метод сил.
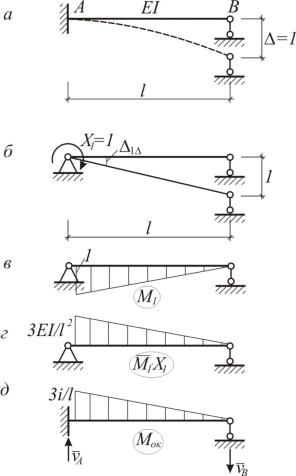
1. Определим концевые реакции в балке (рис. 5.8,а), вызванные взаимным смещением опор на 1.
Рис. 5.8
Данная система 1 раз статически неопределима. Основная система показана на рис.5.8,б. Единичная эпюра приведена на рис.5.8,в. Уравнение метода сил:
11X1 1 1 ;
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
l |
|
||
здесь 1 0; 1 1/ l; 11 |
|
M |
M |
1 |
dx |
|
1 |
|
l |
2 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
|
. |
||||||
|
|
|
EI |
|
|
2 |
3 |
3EI |
||||||||||||||
Тогда |
|
|
|
|
|
|
|
EI |
|
|
|
|
|
|||||||||
|
l |
|
|
X1 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
0. |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
3EJ |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
X1 |
1 3EI |
|
3EI . |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
l l |
|
|
l2 |
|
|
|
|
|
|
|
|
|||
113

Mок M1 X1. M A 3lEI2 3li .
VA VB Ml A l32i .
2. Определим концевые реакции для стержня, защемленного с двух сторон и загруженного равномерно распределенной нагрузкой (рис. 5.9,а).
Рис. 5.9
Данная система два раза статически неопределима. Основную систему выберем, используя группировку неизвестных (рис. 5.9,б). Единичные эпюры показаны на рис. 5.9,в,г. Эпюра M p изображена на рис. 5.9,д.
Система уравнений метода сил
11X1 12 X2 1p 0,21X1 22 X2 2 p 0.
114

распадается на два независимых уравнения:
11X1 1p 0,22 X2 2 p 0.
Т.к. 12 21 0. Но 1p также равняется нулю. Значит, x1 0.
|
1 |
1 l 1 ; 2 p |
1 |
|
2ql |
2 |
|
22 |
|
|
l 1 . |
||||
EI |
|
38 |
|||||
|
|
EI |
|
||||
X2 |
2 p |
|
ql3 EJ |
|
ql2 |
. |
|
22 |
12EI l |
12 |
|||||
|
|
|
|
Mок M2 X2 M p , ( рис. 5 . 9 е) .
Определим концевые реакции для стержня (рис.5.10,а), загруженного сосредоточенной силой в середине пролета.
Рис. 5.10
На рис. 5.10,б,в,г показаны основная система, единичная и грузовая эпюры. Уравнение метода сил
|
|
11X1 1p |
0. |
||||||
Вычисляем: |
|
|
|
|
|
|
|
l3 |
|
|
|
1 |
1 l l |
2 l |
|
|
. |
||
|
|
|
|||||||
11 |
|
EI |
|
3 |
|
|
3EI |
||
|
|
2 |
|
|
|
||||
115

|
1 1 Pl |
|
l |
|
|
l |
|
2 l |
|
|
|
Pl3 |
6 |
|
|||||
1p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6EI |
. |
||
|
|
|
2 |
|
|
3 2 |
|||||||||||||
|
EI 2 2 |
|
|
2 |
|
|
|
|
|
||||||||||
X |
1 |
|
1p |
|
5Pl3 3EJ |
|
5P |
. |
|
|
|
||||||||
|
|
|
48EI l3 |
16 |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
11 |
|
|
|
|
|
|
|
|
|
Mок М1 X1 M p , пред- |
|||||
Окончательная эпюра |
|
моментов, |
равная |
||||||||||||||||
ставлена на рис. 5.10, д.
Аналогично строятся эпюры моментов и определяются концевые реакции для других случаев загружения или перемещения одного из узлов балки. Найденные решения приведены в таблице метода перемещений
(табл. 5.1).
Таблица 5 . 1
|
Таблица метода перемещений |
|
|
|
|
|
|
|
|
||||
№ |
Схемы балок и эпюры изгибающих моментов |
Формулы моментов |
||||
п/п |
и реакций |
|||||
1 |
2 |
|
|
3 |
|
|
1 |
|
i |
EI |
|
|
|
|
|
|
|
l |
3i |
|
|
|
M A |
||||
|
|
|
|
|
l |
3i |
|
|
V |
A |
V |
|
|
|
Рис. 5.11 |
|
B |
l2 |
||
|
|
|
|
|
||
|
|
|
|
|
|
|
2 |
|
M A 3i |
|
|||
|
|
V |
A |
V |
|
3i |
|
|
|
B |
l |
||
|
|
|
|
|
|
|
|
Рис. 5.12 |
|
|
|
3 |
M A ql |
2 |
||
|
|
|||
|
|
|
8 |
|
|
VA |
5 ql |
||
|
|
|
8 |
|
|
V |
3 ql |
||
|
B |
|
8 |
|
|
|
|
|
|
|
Рис. 5.13 |
|
|
|
116

|
Продолжение табл. 5 . 1 |
|||||||||||||||||||
1 |
2 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
||
4 |
|
M A |
Fl v(1 v2 ) |
|||||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VA |
|
|
Fv |
(3 v2 ) |
||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
Fu |
2 |
|
(3 u) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
B |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Рис. 5.14 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
5 |
|
M A |
m(l |
2 |
|
3b |
2 |
) |
|
|||||||||||
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
2l2 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
VA |
|
3m(l2 b2 ) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
2l3 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
V |
|
|
3m(l2 b2 ) |
|||||||||||||||
|
Рис. 5.15 |
B |
|
|
|
|
|
|
|
|
2l3 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
M A |
|
Pab |
2 |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
l2 |
|
|
|
|
|
|
|
|
|
|
||
|
|
M B |
|
Pa2b |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
l2 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
RA |
Pb2 |
|
|
2a |
||||||||||||||
|
|
|
|
l |
2 |
|
1 |
l |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Рис. 5.16 |
R Pa2 |
1 |
2b |
||||||||||||||||
|
В |
|
|
|
l |
2 |
|
|
|
|
l |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
7 |
|
M A |
mb |
(2l 3b) |
||||||||||||||||
|
|
|
|
|
|
|
l2 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
M B |
ma |
(2l 3a) |
||||||||||||||||
|
|
|
|
|
|
|
l2 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
RA 6ab m |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
l3 |
|
|
|
|
|
|
||||
|
|
R |
|
|
|
|
6ab |
m |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
B |
|
|
|
|
|
l3 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Рис. 5.17 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
117

|
Окончание табл. 5 . 1 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
3 |
|
|
|
|
8 |
|
M A M B |
6i |
|
|||||||
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
V |
A |
|
V |
12i |
|
||||
|
|
|
|
|
B |
|
|
l2 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5.18 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
9 |
|
M A 4i |
|
|
|||||||
|
|
M B 2i |
|
|
|||||||
|
|
V |
A |
V |
|
6i |
|
||||
|
|
|
|
|
B |
|
l |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5.19 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
M A M B ql |
2 |
||||||||
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
V |
A |
V |
ql |
|
|||||
|
|
|
|
|
B |
|
|
2 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5.20 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
118

5.5. Примеры расчета рам методом перемещений
Пример №1. Построить эпюру усилий для рамы (рис.5.21,а).
Рис. 5.21
119

ic EJ6 i;
ic 2EJ4 EJ2 3EJ6 3i. r11 9i 4i 13i. R1p 40.
r11Z1 R1p 0.
Z1 R1p 40 . r11 13i
Строим исправленную эпюру М1Z1 (рис. 5.21,г) и складываем ее с грузовой.
Mок M P M1Z1.
Окончательная эпюра моментов показана на рис. 5.21,д. Далее строим эпюру Q (рис.5.21,е) и эпюру N (рис. 5.22,б).
Рис. 5.22
Статическая проверка (рис. 5.22,в):
Fky q 4 56013 48013 80 80 0.
Пример №2. Рама с линейным смещением узлов (рис. 5.23,а). Здесь неизвестно линейное смещение верхних узлов Z1. Основная
система показана на рис.5.23,б.
r11 363 i 3624 i 3627 i 34 i; R1p 165 P;
120