

2488
.pdfПродолжение табл. I I . 2 . 1
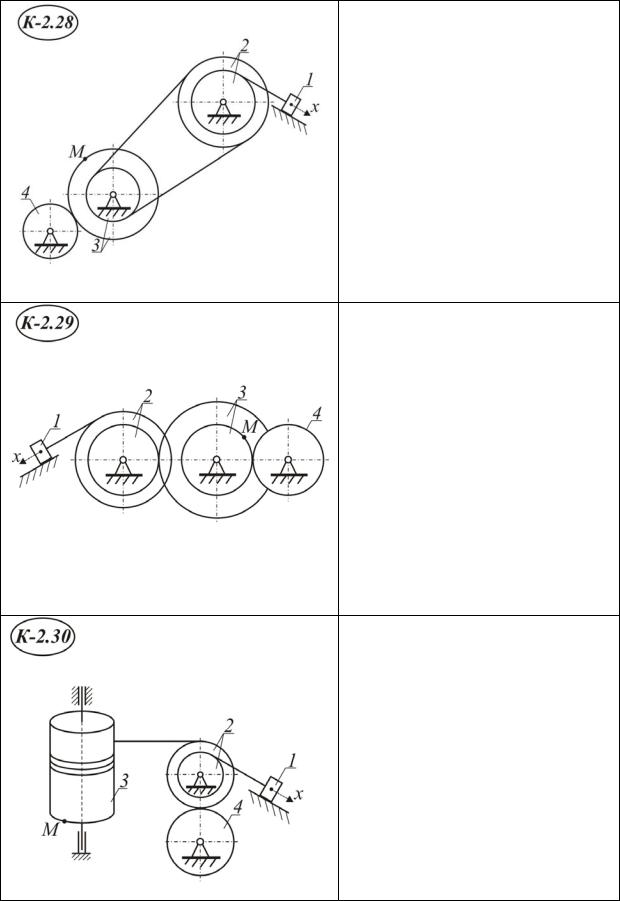
Радиусы:
R2=50 см r2=20 см R3=60 см R4=10 см
При t=0 x0=8 см, v0 =4 см/с При t=t2: x2=119 см
Расчётные моменты времени:
t2=3с, t1=2с.
Закон движения груза 1:
х аt2 v0t x0
2
Радиусы:
R2=32 см r2=16 см R3=32 см r3=16см R4=10 см
При t=0 x0=6 см, v0 =14 см/с
При t=t2 x2=862 см
Расчётные моменты времени:
t2=4 с, t1=2 с.
Закон движения груза 1:
х аt2
2
Радиусы:
R2=40 см r2=18 см R3=40 см r3=18см R4=10 см
При t=0 x0=5 см, v0 =10 см/с
При t=t2 x2=193 см
Расчётные моменты времени:
t2=2 с, t1=1 с.
Закон движения груза 1:
х аt2 v0t x0
2
71
Окончание табл. I I . 2 . 1
Радиусы:
R2=40 см r2=20 см R3=40 см r3=15см R4=20 см
При t=0 x0=8 см, v0 =5 см/с При t=t2 x2=347 см
Расчётные моменты времени:
t2=3 с, t1=2 с.
Закон движения груза 1:
х аt2 v0t x0
2
Радиусы:
R2=25 см r2=20 см R3=50 см r3=25см R4=20 см
При t=0 x0=4 см, v0 =6 см/с При t=t2 x2=32 см
Расчётные моменты времени:
t2=2 с, t1=1 с.
Закон движения груза 1:
х аt2 v0t x0
2
Радиусы:
R2=30 см r2=15 см R3=20 см
R4 25 см.
При t=0 x0=10 см, v0 =7 см/с
При t=t2 x2=128 см
Расчётные моменты времени:
t2=2 с, t1=1 с.
Закон движения груза 1:
х аt2 v0t x0
2
72
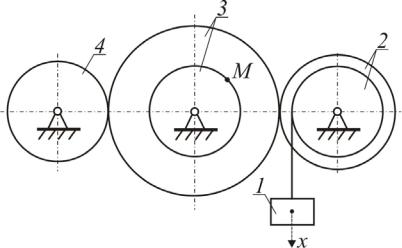
Пример выполнения задания К-2
Дано: схема механизма (рис. II.2.1). |
|
|
||
R2 16 см, |
r2 8 см, |
R3 14 см, r3 10 см, |
||
R4 8 см, |
x0 2 см, |
v0 |
4 см/c, |
x2 320 см, |
t2 5 c .
Закон движения груза
x at2 V0t x0. 2
Определить в момент времени t1 2 c скорость и ускорение груза,
скорость и ускорение точки М одного из колес механизма, угловые скорости и ускорения всех колес механизма.
Рис. II.2.1 Заданная схема механизма
Решение:
1. По закону движения груза найдем ускорение груза а. При t2 5 c
320 |
a 52 |
4 5 2 |
|
a 23,84 см/с |
2 |
2 |
|
||||
|
|
|
|
|
Скорость груза
v dxdt x.
Так как
x at2 v0t x0 11.92t2 4t 2, 2
то v 23,84t 4.
73

При t1 2 c |
|
v 23,84 2 4 51,68 см / с; |
a const 23,84 см / с2 . |
2. Определяем угловые скорости и ускорения всех колес.
2 v 23,84t 4 2,98t 0,5 . r2 8
При t1 2 c
ω2 6,46 рад/с .
Для определения угловой скорости третьего колеса запишем уравнение, связывающее искомую величину с известной угловой скоростью второго колеса:
R2ω2 R3ω3,
следовательно,
ω3 R2ω2 16(2,98t 0,5) 3,4t 0,57. R3 14
При t1 2 c
ω3 7,37 рад / с.
Угловую скорость четвертого колеса найдём, зная, что при зацеплении колёс угловые скорости обратно пропорциональны радиусам R:
ω4 R3 14 1,75, ω4 1,75(3,4t 0,57) 5,95t 1.
ω3 R4 8
При t1 2 c
ω4 12,9 рад/с.
Так как значение углового ускорения тела в данный момент времени равно первой производной от угловой скорости, то
ε2 ω2 2,98 рад/ с2;
ε3 ω3 3,4 рад/с2;
ε4 ω4 5,95 рад/с2 .
3.Скорость и ускорение точки М при t1 2 c
vM r3ω3 10 7,37 73,7см/с;
74
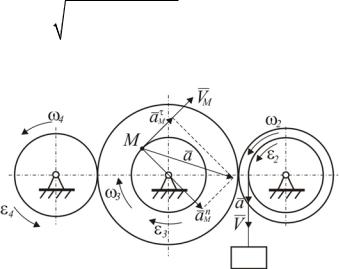
aMτ r3 ε3 10 3,4 34 см/с2 ;
an |
r |
ω2 |
10 7,372 |
543,17 см/с2 . |
M |
3 |
3 |
|
|
aM |
aMτ |
2 aMn 2 |
544,23 см/с2 |
|
Покажем найденные величины на рис. II.2.2
Рис. II.2.2. Кинематические характеристики шкивов и точки М в момент времени t1
3. Плоское движение твёрдого тела
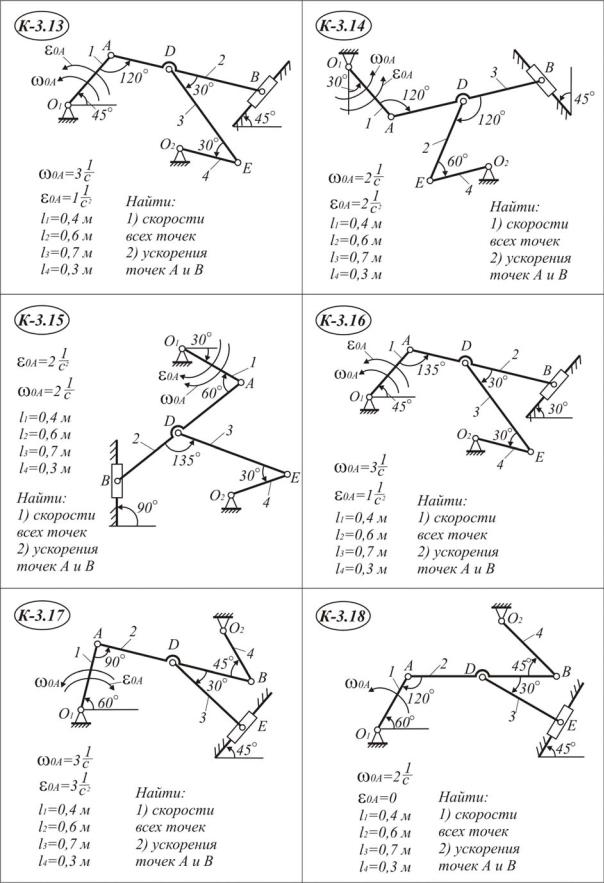
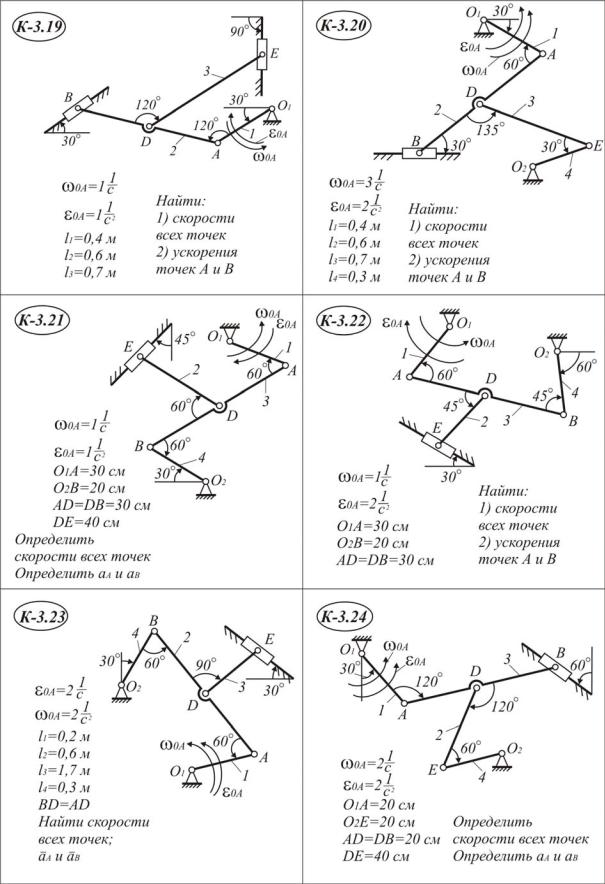
Задание К 3. Определение скоростей и ускорений точек многозвенного механизма
Плоский механизм состоит из стержней 1, 2, 3, 4 и ползуна В или Е, соединённых друг с другом и с неподвижными опорами О1, О2 шарнирами.
Определить для заданного положения механизма скорости точек А, В, Д, Е, угловые скорости всех звеньев, ускорения точек А и В, угловое ускорение звена АВ.
Схемы механизмов и необходимые для расчёта данные показаны в табл. II.3.1.
Указания. Определить скорости точек механизма можно с помощью мгновенного центра скоростей или по теореме о проекциях скоростей двух точек тела.
Для определения ускорений точек механизма следует воспользоваться теоремой об ускорениях точек плоской фигуры: аВ аА аВА аВАn . При непрямолинейном движении ускорения точки ( aА или aB ) надо представлять в виде двух составляющих – тангенциальной и нормальной
75
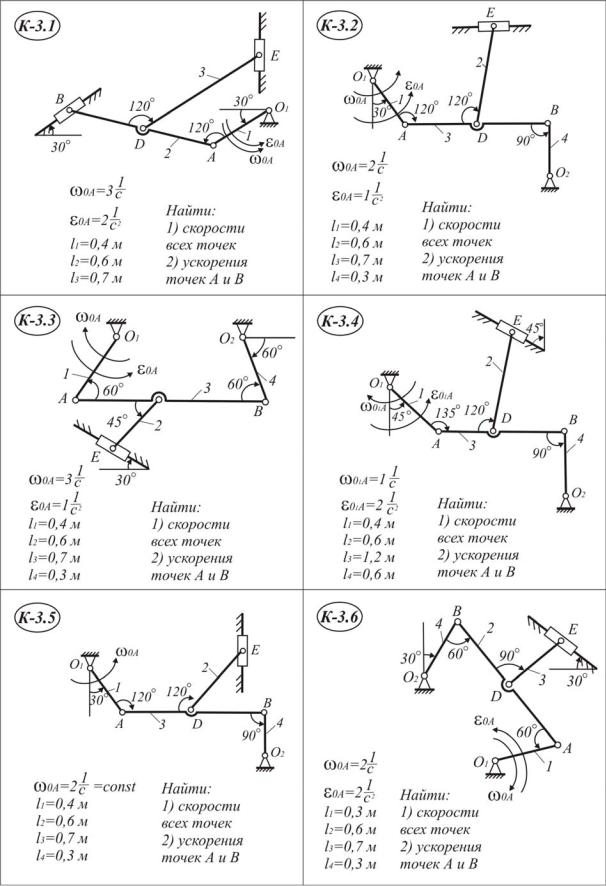
Таблица I I . 3 . 1
76

П р о дол жение табл. I I . 3 . 1
77
П р о дол жение табл. I I . 3 . 1
78
П р о дол жение табл. I I . 3 . 1
79
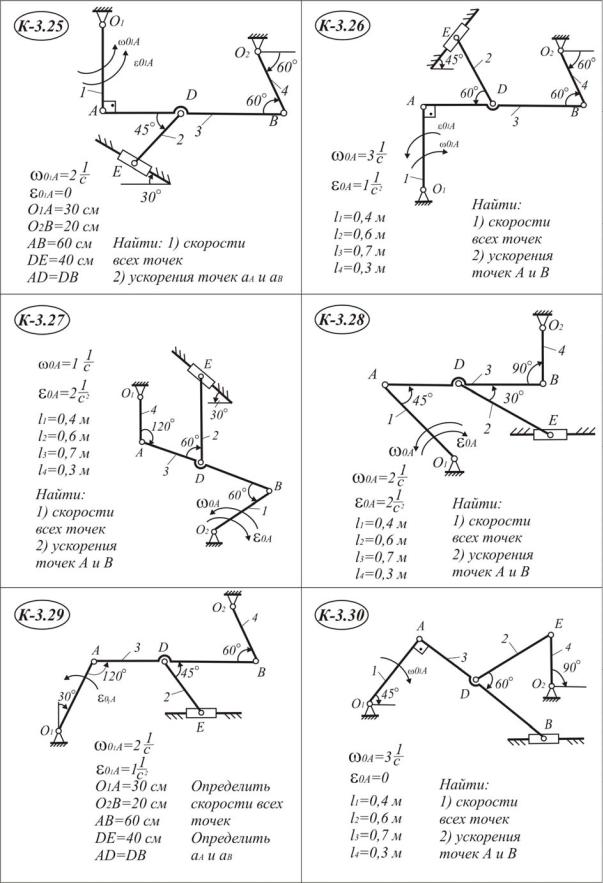
Окончание табл. I I . 3 . 1
80