

2351
.pdfС учетом выражения (2.1.10) уравнение (2.1.4) можно представить в виде
v dr |
dx |
|
dy |
|
dz |
|
. |
(2.1.12) |
i |
j |
k |
||||||
dt |
dt |
dt |
|
dt |
|
|||
Сопоставляя уравнения (2.1.12) и (2.1.11), получаем:
vx |
dx |
|
|
dt |
x; |
|
|
|
|
|
|
|
dy |
|
|
vy |
|
(2.1.13) |
|
dt |
y; |
||
|
|
|
|
vz |
dz |
|
|
dt |
z. |
|
|
|
|
|
Проекция скорости на координатную ось равна первой производной от соответствующей координаты по времени.
Полная величина скорости
v |
vx2 vy2 vz2 |
|
x2 y2 z2 . |
(2.1.14) |
Направление вектора скорости определяем с помощью направляющих косинусов:
cos(v , |
|
x) |
v |
x |
; cos(v , |
|
y) |
vy |
; cos(v , |
|
z) |
v |
z |
. |
(2.1.15) |
|
v |
|
v |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
v |
|
|||||
Вектор ускорения точки также можно записать через проекции:
a ax |
|
ay |
|
az |
|
, |
(2.1.16) |
i |
j |
k |
Рис. 2.5. Ускорение точки и его проекции
С другой стороны, дифференцируя уравнение (2.1.12) по времени, получаем:
|
dv |
|
d 2 x |
|
|
d 2 y |
|
|
d 2 z |
|
|
|
|
||||
a |
|
i |
|
j |
k . |
(2.1.17) |
|||||||||||
dt |
dt |
2 |
dt |
2 |
dt |
2 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||
71

Сопоставляя выражения (2.1.17) и (2.1.16), записываем:
ax dvx |
d |
2 |
x |
|
|
|
|||
|
|
; |
|
||||||
|
dt |
|
dt2 |
|
|
|
|||
ay |
dvy |
|
d 2 y |
|
|
||||
|
|
|
|
2 |
|
; |
(2.1.18) |
||
dt |
dt |
|
|||||||
|
|
|
|
|
|||||
az |
dv |
z |
|
d 2 z |
|
|
|
||
|
dt2 |
. |
|
||||||
|
dt |
|
|
|
|
||||
Проекция ускорения на какую-либо ось равна второй производной от соответствующей координаты по времени.
Величина ускорения точки М определяется из выражения
a |
ax2 ay2 az2. |
(2.1.19) |
Направление вектора ускорения определяем с помощью направляющих косинусов:
cos(a, |
|
x) |
a |
x |
; cos(a, |
|
y) |
ay |
; cos(a, |
|
z) |
a |
z |
. |
(2.1.20) |
|
|
|
|
a |
|
|
|
||||||||
|
|
|
a |
|
|
|
|
|
a |
|
|||||
Пример . Уравнения движения точки имеют вид: x 10sin 3 t, см,
y 5cos 3 t, см.
Найти траекторию точки, v и a в момент времени t1= 1 c.
Решение.
Возведя обе части каждого уравнения в квадрат и сложив полученные уравнения, имеем:
x2 y2 1. 102 52
Такимобразом, уравнениетраекторииточки– эллипс(рис. 2.6).
При t1=1 с x1=8,66 см, y1=2,5 см.
Проекции скорости:
vx dx |
10 |
cos |
t 5,233 см/с, |
|
||||
|
dt |
|
3 |
|
3 |
|
|
|
|
dy |
|
|
|
|
|
|
|
vy |
5 |
sin |
|
|
||||
dt |
3 |
3 |
t 4,532 см/с. |
|||||
|
|
|
|
|
|
|||
72
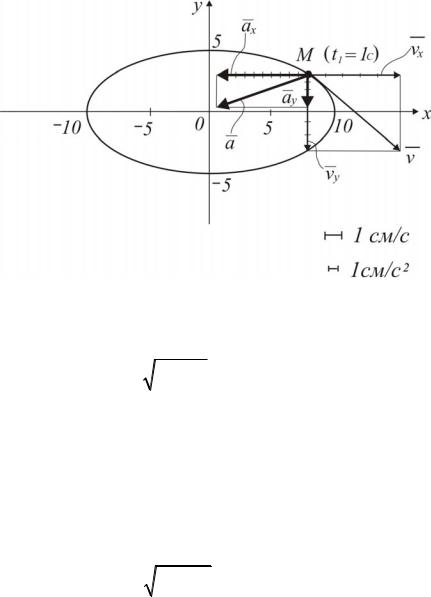
Рис. 2.6. Траектория движения и кинематические характеристики движения точки в момент времени t1=1 с
Величина скорости точки М: |
|
|
|
|
|
|
|||||
|
v |
vx2 |
|
vy2 |
6,922 см/с. |
|
|||||
Проекции ускорения: |
|
|
|
|
2 |
|
|
|
|
|
|
ах dvx 10 |
sin |
t 9,487 см/с2 |
; |
||||||||
|
dt |
|
|
|
|
9 |
|
|
3 |
|
|
ау |
dv |
y |
5 |
2 |
cos |
|
t 2,738 см/с2 . |
||||
|
|
|
9 |
3 |
|||||||
|
dt |
|
|
|
|
|
|
||||
Величина ускорения точки: |
|
|
|
|
|
|
|
||||
|
a |
ax2 |
ay2 |
9,87 см/с2 . |
|
||||||
2.2. Определение скорости и ускорения точки при естественном способе задания движения
2.2.1. Естественный способ задания движения точки
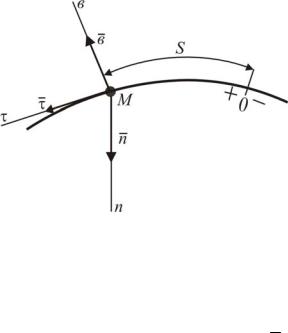
Если известна траектория точки, то удобно движение задавать в следующем виде. Будем отсчитывать расстояния s от некоторой точки траектории О до движущейся точки М:
s=s(t). |
(2.2.1) |
Здесь s – дуговая координата точки;
s(t) – дважды дифференцируемая непрерывная функция от времени.
73
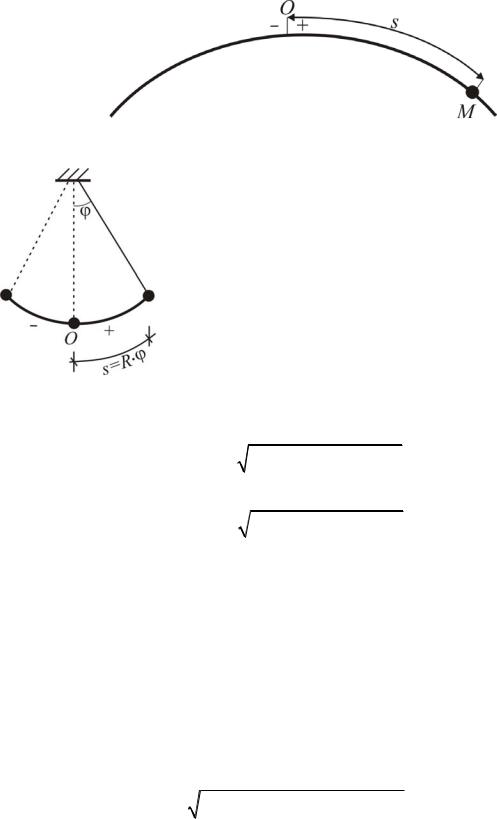
Рис. 2.7. Естественный способ задания движения точки
Рис. 2.8. Дуговая координата точки не равна ее пути
тогда
Так как
значит,
Расстояние s в одну сторону от точки О считается положительным, в другую – отрицательным. Точку О удобно брать в том месте траектории движения, где точка находится в начальный момент времени. Расстояние s=ОМ может быть не равно пути, пройденному точкой. Например, при колебаниях маятника дуговая координата многократно равна 0, в то время как путь, пройденный точкой, непрерывно увеличивается.
Траектория движения может быть задана или уравнениями, или словесно, или в виде графика. Между заданиями движения в декартовой и естест-
венной формах легко установить связь. Как известно, дифференциалдугикривой
ds |
(dx)2 |
(dу)2 (dz)2 , |
(2.2.2) |
|
t |
|
|
|
|
s |
(dx)2 |
(dу)2 (dz)2 . |
(2.2.3) |
|
0 |
|
|
|
|
|
x f |
(t), |
|
|
|
|
1 |
|
(2.2.4) |
|
у f2 (t), |
|||
|
z |
|
|
|
|
f3 (t), |
|
||
|
dx |
|
|
|
|
f1(t)dt, |
|
||
|
dу |
|
|
(2.2.5) |
|
f2 (t)dt, |
|||
|
dz |
|
|
|
|
f3 (t)dt, |
|
||
t |
|
2 |
|
(t)) |
2 |
|
2 |
dt . |
|
|
s |
(2.2.6) |
|||||||||
( f1(t)) |
|
( f2 |
|
( f3 (t)) |
|
|||||
0 |
|
|
|
|
|
|
|
|
|
74
2.2.2. Скорость точки при естественном способе задания движения
Пусть известны траектории точки и закон движения точки по траектории s=s(t). Определим скорость точки.
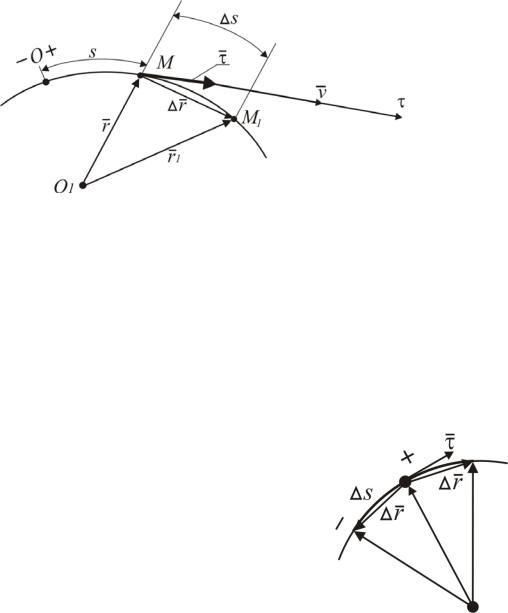
Пусть в момент времени t точка занимает положение М, а в момент времени t1 t t – положение М1 (рис. 2.10). Проведем из неподвижной точки О1
радиусы-векторы r и r1 , определяющие положение точки в моменты времени t иt1 Какбылоустановленоранее,
v dr . |
(2.2.7) |
dt |
|
Рис. 2.10. Скорость точки при естественном способе задания движения
Перепишем уравнение (2.2.7) в виде |
|
|
||||
v dr ds . |
|
|||||
Тогда |
|
ds |
dt |
|
||
|
|
|
|
|
|
|
dr |
lim |
r |
. |
|||
ds |
|
s 0 |
s |
|
||
При s 0 |
|
|
|
1. |
|
|
|
|
|
|
|||
Направление вектора не зависит от знака со- |
||||||
отношения |
r |
. На самом деле, при s 0 знак от- |
||||||||
|
s |
|
r |
|
|
|
r |
|
|
|
ношения отрицательный, то есть |
|
|
|
|
|
(рис. |
||||
s |
|
|
s |
|
|
|||||
|
|
|||||||||
|
|
|
|
|
|
|
|
|
||
(2.2.7’)
(2.2.8)
(2.2.9)
2.11). При этом вектор |
направлен положительно. |
|
||||
При s 0 r |
|
|
r |
и |
опять направлен в поло- |
|
|
s |
|
||||
s |
|
|
|
|
Рис. 2.11. Направление |
|
жительном направлении. |
Значит, единичный вектор |
|||||
всегда направлен по касательной к траектории в сто- |
вектора |
|||||
|
||||||
ронувозрастающих(положительных) расстоянийдуговойкоординаты.
75
Итак, |
|
|
|
|
|
|
v ds |
. |
(2.2.10) |
|
|
dt |
|
|
При |
ds |
0 вектор скорости точки v |
направлен в сторону возрастаю- |
|
|
dt |
|
|
|
щих расстояний дуговой координаты.
При dsdt 0 вектор скорости точки v направлен в сторону убывающих
расстояний дуговой координаты. Величину
v ds |
(2.2.10) |
dt |
|
называют алгебраической скоростью точки или проекцией скорости на касательную ось. Касательная ось направлена так же, как и (единичный вектор).
2.2.3. Элементы геометрии кривой
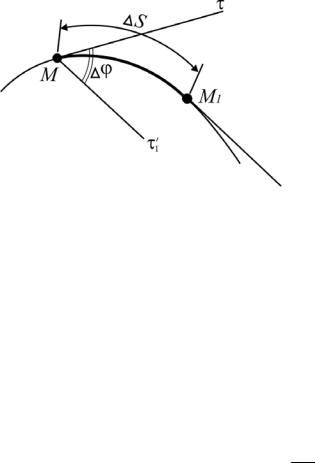
Пусть в моменты времени t и (t+ t) точка занимает на траектории соответственно положения М и М1. При этом касательные оси и 1 – соответственно (рис. 2.11). Расстояние междуточкамиМиМ1 равно s.
В общем случае пространственной кривой касательные М и М1 1 скре-
щиваются. Угол между М и M 1 на-
Рис. 2.11. Угол смежности зывают углом смежности. Кривизной кривой в точке М называют предел от-
ношения угла смежности к расстоянию s |
при стремлении s к нулю: |
|||
k lim |
|
d . |
(2.2.11) |
|
s 0 |
s |
|
ds |
|
Радиусом кривизны в точке М называют величину, обратную кривизне:
|
1 |
|
ds |
. |
(2.2.12) |
k |
|
||||
|
|
d |
|
||
Для окружности радиус кривизны совпадает с радиусом окружности. В самом деле, для окружности
s R , ds R d R . d d
76
2.2.4. Естественные оси
Проведем через М и M ' |
(рис. |
2.11) плоскость. При стремлении |
|
|
1 |
|
|
s 0, |
М1 М плоскость займет некоторое предельное положение – |
||
положение соприкасающейся плоско- |
|
||
сти, т.е. соприкасающаяся плоскость |
|
||
пройдет через касательные к кривой в |
|
||
двух соседних точках. |
|
|
|
Проведем (рис.2.12) в соприка- |
|
||
сающейся плоскости из точки М ось |
|
||
n . Эту ось направим в сторону во- |
|
||
гнутости траектории. Ось n назы- |
|
||
вается главной нормалью. Перпенди- |
|
||
кулярно к соприкасающейся плос- |
Рис. 2.12. Естественные оси |
||
кости проведем ось b в ту сторону, |
|||
глядя откуда ближайшее совмещение |
|
||
с n будет казаться направленным против хода часовой стрелки. Ось b называют бинормаль. Итак, оси , n, b называются естественными осями кривой. При движении точки по кривой собственный трехгранник движется
вместе с точкой, поворачиваясь вокруг нее. Единичные векторы , n и b , направленные вдоль осей , n и b, называются единичными ортами.
2.2.5. Дифференцирование единичного вектора
Вычислим производную единичного вектора по скалярному аргумен-
ту |
d |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
dt |
|
|
|
|
|
|
|
|
Известно, что |
|
|
|
|
|
|
|
|
|
|
|
1. |
|
(2.2.13) |
||
|
Тогда |
|
|
|
|
|
|
|
|
|
d |
d |
0 |
(2.2.14) |
|||
|
|
dt |
|
|
dt |
|
|
|
или |
|
|
|
|
|
|
||
|
|
2d 0 . |
|
(2.2.15) |
||||
|
|
|
dt |
|
|
|
||
|
Но оба сомножителя здесь не равны нулю: |
|
|
|||||
|
|
0, |
|
d |
0 |
d |
. |
|
|
|
|
|
|
||||
|
|
|
|
dt |
|
dt |
||
77
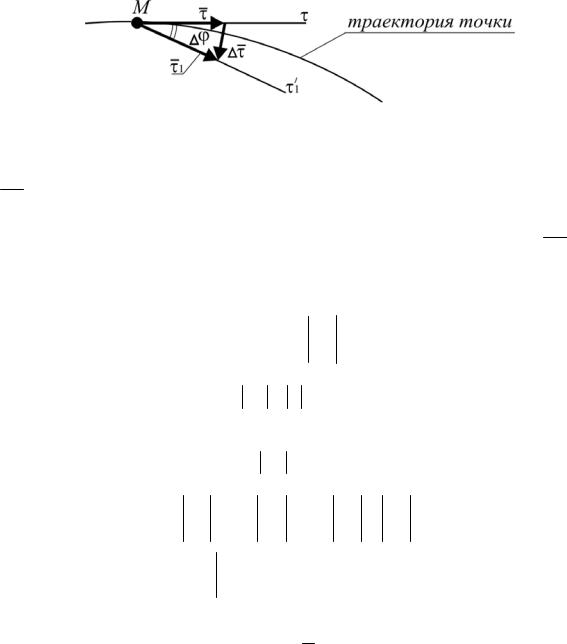
Рис. 2.13. Направление
Так как в пределе лежит в соприкасающейся плоскости, то вектор ddt находится в соприкасающейся плоскости, он перпендикулярен вектору
и направлен в сторону вогнутости траектории; следовательно, ddt на-
правлен также, как n . Можно записать:
или
d dt
d dt
d d n . dt dt
sin
1 ,
lim lim d ,
t t dt
d |
|
n |
|
|
d |
|
|
|
|
|
ds |
|
|
n |
v |
n, |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|||||||||||||
dt |
|
|
|
ds |
|
|
|
|
dt |
|
|
|
||||
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d v n . dt
(2.2.16)
(2.2.17)
(2.2.18)
2.2.6. Ускорение точек при естественной форме задания движения
Дифференцируя выражение для скорости v dsdt , получим:
a |
dv |
|
d |
|
ds |
|
d 2s |
|
v2 |
n |
dv |
. |
(2.2.19) |
|
dt |
dt |
dt |
dt2 |
|
dt |
|||||||||
|
|
|
|
|
|
|
|
Касательная составляющая ускорения
a dv , |
(2.2.20) |
dt
78
нормальная составляющая ускорения an v2 n,
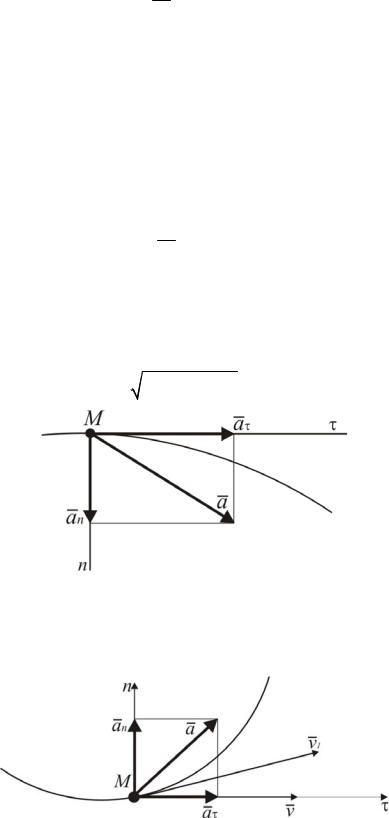
полное ускорение
a a an.
Проекция ускорения на касательную ось a dvdt ,
проекция ускорения на нормальную ось an v2 ,
проекция ускорения на бинормаль равна нулю: ab 0 .
Величина ускорения
a (a )2 (an )2 .
(2.2.21)
(2.2.22)
(2.2.23)
(2.2.24)
(2.2.25)
(2.2.26)
Рис. 2.14. Разложение ускорения на нормальную и касательную составляющие
В самом деле, соприкасающаяся плоскость n проведена через векторы скорости двух соседних точек.
Рис. 2.15. Ускорение лежит в соприкасающейся плоскости
79
Вектор ускорения
a dv |
lim |
v |
lim v1 v |
, |
dt |
|
t |
t |
|
как v1 и v , лежит в соприкасающейсяплоскости. Следовательно, ускорениене можетпроектироватьсянаосьb. Значит, ab 0.
Итак,
|
dv |
, |
|
a |
dt |
||
|
|
||
v2 |
|
||
|
|
||
an |
|
, |
|
|
|||
|
|
||
ab 0. |
|
||
|
|
|
|
|
|
|
|
Если
если
a a2 an2 .
s 0, s 0
– ускоренное движение;
s 0, s 0
s 0, s 0
– замедленное движение.
s 0, s 0
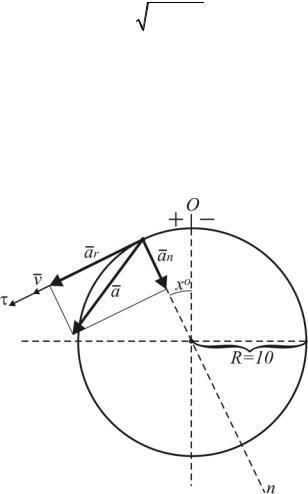
Пример . Точка движется по окружности R=10 см по закону s 4t2 см. Определить скорость и ускорение точки в момент времени t 1 c.
Рис. 2.16. Положение точки на траектории и ее скорость и ускорение в данный момент времени
Положение точки на траектории определим из следующих соображений:
s 4t2 4 см,
80