

1370
.pdfрасстояниях друг от друга. Поскольку такой эксперимент провести довольно сложно, иногда вычерчивают в масштабе схемы автомобилей и, нанеся на них поврежденные зоны, определяют угол столкновения графически.
Определить начальную скорость автомобиля обычно довольно трудно, а иногда и невозможно.
Отсутствие надежной информации о коэффициенте восстановления Kуд часто вынуждает экспертов рассматривать предельный случай, считая удар абсолютно неупругим (Kуд=0).
11.4. Определение параметров прямого столкновения
Определитьпараметрыпрямого столкновения(встречногоипопутного) можно лишь в том случае, если один из автомобилей до удара был неподвижным ( v2 0 ) и после удара оба автомобиля перемещаются как
единое целое со скоростью v1 .
аv1 v2=0
1 |
2 |
1 |
2 |
|
|
|
|
Sпн |
|
|
|
|
|
|
б |
1 |
2 |
|
||
1 |
2 |
|
Sю1 |
Sпн |
|
в |
1 |
|
2 |
|
|||||||||||||||
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
г |
|
|
|
Sпн |
|
|
|
||||||||||||
|
|
|
|
|
|||||||||||||||
|
|
|
Sпн1 |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Sю1 |
|
|
|
|
|
|
|
Sпн2 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 11.5. Схемы наезда автомобиля на стоящий автомобиль:
а – оба автомобиля не заторможены; б – оба автомобиля заторможены; в – заторможен передний автомобиль; г – заторможен задний автомобиль
161
При этом возможны такие варианты (рис. 11.5):
а) автомобили не заторможены, и после удара они катятся свободно с начальной скоростью v1 . Уравнение кинетической энергии при этом
m |
m |
|
v1 2 |
m |
m |
g |
дв |
S |
пн |
, |
(11.10) |
|
|||||||||||
1 |
2 |
2 |
1 |
2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
где Sпн – перемещение автомобиля после удара;
дв – коэффициент суммарного сопротивления движению,
дв д PвG Pxx ;
вр
здесь д – коэффициент сопротивления дороги, д f cos д sin д;
Рв – сила сопротивления воздуха; Рхх – сила сопротивления трансмиссии;
вр – коэффициент учета вращающихся масс;
G – вес автомобиля;
f – коэффициент трения;д – угол наклона дороги.
Откуда
v1 |
2g дв Sпн . |
(11.11) |
Скорость автомобиля 1 перед ударом при v2=0 и v1 v2 :
v1 |
m1 m2 v1 ; |
(11.12) |
|
m1 |
|
б) оба автомобиля заторможены, после удара перемещаются совместно на расстояние Sпн с начальной скоростью v1 .
Скорость автомобиля после удара
v1 |
2g xSпн , |
(11.13) |
где х – коэффициент продольного сцепления. Скорость автомобиля 1 в момент удара
v1 m1 m2 v1 . m1
Скорость автомобиля 1 в начале тормозного пути
va1 |
2g xSю1 v1 2 , |
(11.14) |
где Sю1 – длина следа юза автомобиля 1 перед ударом. |
|
|
Скорость автомобиля 1 перед началом торможения |
|
|
va |
va1 0,5t3g x ; |
(11.15) |
162
в) заторможен стоящий автомобиль 2, автомобиль 1 не заторможен. Уравнение кинетической энергии в этом случае
m1 m2 v1 2 m1 дв m2 x gSпн , 2
откуда
v1 |
|
2gSпн m1 дв m2 x |
. |
(11.16) |
||
m1 |
m2 |
|||||
|
|
|
|
|||
Скорости v1, va1, va определяются как в предыдущих случаях;
г) стоящий автомобиль не заторможен, задний автомобиль 1 перед ударом в заторможенном состоянии перемещается юзом на расстояние Sю1. После удара перемещение автомобиля 1 равно Sпн1, автомобиля 2 – Sпн2.
По аналогии с предыдущим из уравнения кинетической энергии
m1 m2 |
|
v1 2 |
m1 x1Sпн m2 двSпн2 g |
|
||
|
|
2 |
|
|
|
|
получаем |
|
|
|
|
|
|
v1 |
2g m1 x1Sпн1 m2 двSпн2 |
|
. |
(11.17) |
||
|
|
m1 m2 |
|
|||
|
|
|
|
|
|
|
Скорости v1, va1, va определяются так же, как и выше.
Применить эту методику для анализа встречного или попутного столкновения, при котором двигались оба автомобиля, возможно только в том случае, если следствием или судом установлена скорость одного из автомобилей.
11.5. Определение параметров при перекрестном столкновении
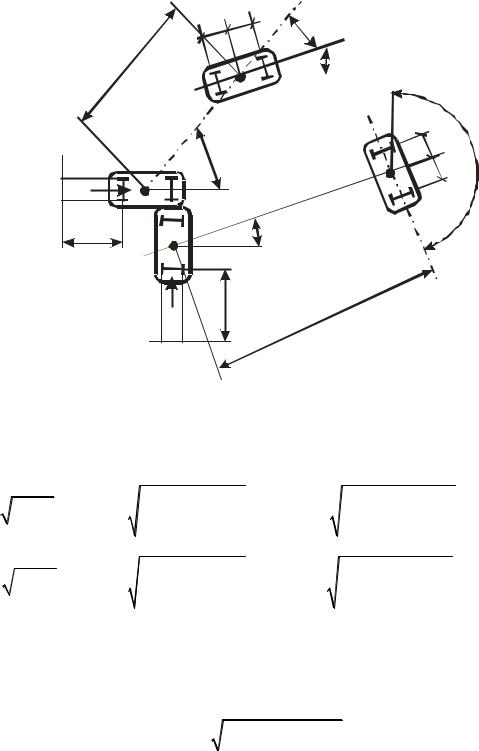
При перекрестном столкновении оба автомобиля обычно совершают сложные движения, так как в результате столкновения каждый из автомобилей начинает вращаться около своего центра тяжести. Центр тяжести, в свою очередь, перемещается под некоторым углом к первоначальному направлению движения.
Рассмотрим перекрестное столкновение автомобилей, которые перед столкновением тормозили и оставили тормозные следы Sю1 и Sю2. После столкновения центр тяжести автомобиля 1 переместился на расстояние Sпн1 под углом 1, а центр тяжести автомобиля 2 – на расстояние Sпн2 под углом 2.
Все количество движения системы можно разложить на две составляющие в соответствии с первоначальным направлением движения
163
автомобилей 1 и 2. Поскольку количество движения в каждом из указанных направлений не изменится, то
m1v1 m1v1 cos 1 |
m2v2 cos 2 ; |
(11.18) |
m2v2 m1v1 sin 1 |
m2v2 sin 2 , |
(11.19) |
где v1 и v2 – скорости автомобиля 1 и 2 после удара.
Эти скорости можно найти, предположив, что кинетическая энергия каждого автомобиля после удара перешла в работу трения шин по дороге во время поступательного перемещения на расстояние Sпн1(Sпн2) и поворота
центра тяжести на угол 1( 2).
Работатренияшинподорогеприпоступательномдвиженииавтомобиля1:
|
|
A m1gSпн1 у . |
(11.20) |
|
|
|
|
То же, при повороте его относительно центра тяжести на угол 1: |
|||
|
|
RZ1a1 1 y RZ 2b1 1 y , |
(11.21) |
|
A |
||
гдеa1 иb1 – |
расстояние от переднего и заднего мостов автомобиля 1 до |
||
RZ1, RZ2 – |
его центра тяжести; |
|
|
нормальные реакции дороги, действующие на передний и |
|||
|
задний мосты автомобиля 1; |
|
|
1 – |
угол поворота автомобиля 1, рад; |
|
|
y – |
коэффициент поперечного сцепления. |
|
|
При этом |
|
|
|
RZ1 m1gb1 / L1;
RZ 2 m1ga1 / L1,
где L1 – база автомобиля 1. Тогда
|
|
|
|
|
|
1 |
|
|
|
|
m v1 2 |
|
||
m1g Sпн1 y 2a1b1 1 y |
|
|
|
|
|
|
. |
|||||||
A |
A |
|
|
|
2 |
|||||||||
|
|
|
|
|
|
L1 |
|
|
|
|||||
Отсюда скорость автомобиля 1 после столкновения |
|
|||||||||||||
|
|
v1 |
|
|
|
1 |
|
|
|
|
|
|
||
|
|
2g y |
Sпн1 |
2a1b1 1 |
|
. |
|
(11.22) |
||||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
L1 |
|
|
|
|
|||
Аналогично |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v2 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
2g y Sпн2 |
2a2b2 2 |
|
|
|
, |
(11.23) |
||||||
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
L2 |
|
|
||||
где L2 – база автомобиля 2;
164
a2 и b2 – расстояния от переднего и заднего мостов автомобиля 2 до его центра тяжести.
|
b1 a1 |
1– 1 |
|
Sпн1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
b2 |
2 |
|
a2 |
||
|
|
||
v1 |
|
|
|
Sю1 |
|
2 |
|
v2
Sю2
Sпн2
Рис. 11.6. Схема перекрестного столкновения автомобилей
Подставив значения 1 и 2 из уравнений (11.22) и (11.23) в уравнения
(11.18) и (11.19), получим:
|
|
|
|
|
|
|
|
|
|
2 |
|
|
1 |
|
|
||
v1 |
|
2g y m1 cos 1 |
Sпн1 2a1b1 |
1 |
m2 cos 2 |
Sпн2 2a2b2 |
|
|
|
|
|
|
; |
(5.24) |
|||
L1 |
|
L2 |
|
||||||||||||||
|
|
|
|
|
|
|
|
m1 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
2 |
|
|
1 |
|
|
|||
v2 |
|
2g y m1 sin 1 |
Sпн1 2a1b1 |
|
1 |
m2 sin 2 |
Sпн2 2a2b2 |
|
|
|
|
|
|
. |
(5.25) |
||
|
L1 |
L2 |
|
|
|||||||||||||
|
|
|
|
|
|
|
m2 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Зная скорости v1 и v2 автомобилей непосредственно перед столкновением, можно найти скорости в начале тормозного пути и перед началом торможения.
Скорость автомобиля 1 в начале тормозного пути va1 2g xSю1 v1 2 .
Скорость автомобиля 1 перед началом торможения va 0,5t3g x va1.
Аналогично определяются скорости второго автомобиля.
165
Скорости автомобилей перед перекрестным столкновением, определенные таким способом, являются минимально возможными, так как в расчетах не учтена энергия, затраченная на вращение обоих автомобилей. Фактические скорости могут быть на 10–20 % выше расчетных.
11.6. Решение вопроса о технической возможности предотвращения столкновения автомобилей
Ответ на вопрос о возможности предотвратить столкновение связан с определением расстояния между автомобилями в момент возникновения опасной дорожной обстановки. Установить это расстояние экспертным путемтрудно, ачастоиневозможно. Данные, содержащиесявследственных документах, как правило, неполны или противоречивы.
Рассмотрим попутные столкновения.
Если столкновение явилось результатом неожиданного торможения переднего автомобиля, то при исправной тормозной системе заднего автомобиля причиной столкновения могут быть только две причины:
опоздание с началом торможения водителя заднего автомобиля;
неправильно выбранная дистанция водителем заднего автомобиля. Минимальная дистанция между автомобилями по условиям безопас-
ности
|
|
|
|
|
|
|
|
|
|
|
va 2 |
|
|
|
|
|
|
|
va 2 |
|
|
S |
|
t |
t |
0,5t |
|
|
t |
0,5t |
|
|
|
, |
(11.26) |
||||||||
|
v |
|
|
|
2 j |
v |
|
|
2 j |
||||||||||||
|
б |
a |
|
1 |
|
2 |
|
3 |
|
a |
|
2 |
|
3 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где одним штрихом обозначены параметры переднего автомобиля, а двумя – заднего.
Наибольшей безопасная дистанция должна быть при следовании грузового автомобиля за легковым, так как при этом
t2 t2 , t3 t3 и j j .
Если транспортные средства однотипны и их скорости одинаковы и равны va, то
Sб vat1 .
Если фактическая дистанция между автомобилями Sф больше Sб, можно сделать вывод о том, что водитель заднего автомобиля имел техническую возможность избежать столкновения. При Sф<Sб вывод будет противоположный.
Предотвратить встречное столкновение автомобилей, движущихся по одной полосе, водителям удается лишь в том случае, если оба успеют затормозить и остановить автомобили.
166
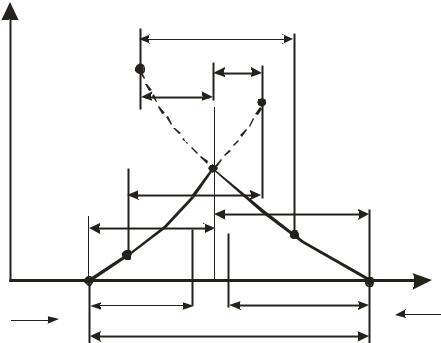
Рассмотримвозможностьпредотвращениявстречногостолкновения. На рис. 11.7 показан процесс сближения автомобилей 1 и 2.
t |
|
Sо2 |
|
|
|
|
|
|
|
|
|
|
IV |
Sпн1 |
|
|
|
|
Sпн2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
IV |
|
|
|
|
III |
|
|
|
|
|
Sо1 |
Sуд2 |
|
|
|
|
Sуд1 |
|
|
|
|
|
|
|
|
|
|
|
II |
II |
|
S |
|
|
Sо2 |
|
||
I |
Sо1 |
I |
va2 |
||
va1 |
|
Sуд=Sв |
|
|
|
|
|
|
|
|
|
Рис. 11.7. График движения автомобилей при встречном столкновении: I – положения автомобилей в момент возникновения опасной обстановки; II – положения автомобилей в момент фактического реагирования водителей
на опасную обстановку; III – момент столкновения автомобилей; IV – положения автомобилей, в которых они остановились бы, если бы не столкнулись
Очевидное условие возможности предотвратить столкновение:
Sуд Sуд1 Sуд2 So1 So2 , |
(11.27) |
где Sуд1 и Sуд2 – удаление автомобилей от места столкновения в момент возникновения опасной обстановки;
Sо1 и Sо2 – остановочные пути автомобилей.
Расстояния Sуд1 и Sуд2, а также начальные скорости автомобилей va1 и va2 должны быть определены следственным путем.
Если водители начали торможение не в положении I, а в положении II, то столкновение становится неизбежным. Особенно часты такие случаи в ночное время, когда недостаточная освещенность затрудняет определение расстояния и распознавание транспортных средств.
Для установления причинной связи между действиями водителей и наступившими последствиями нужно ответить на вопрос: имел ли каждый из водителей техническую возможность предотвратить столкновение при своевременном реагировании на опасность, несмотря на неправильные действия другого водителя?
167

Если предположить, что водитель автомобиля I своевременно реагировал на препятствие, а водитель автомобиля II запоздал с началом торможения, то примерная последовательность расчета будет такова:
1. Остановочный путь первого автомобиля
So1 T va1 v2a1j 2 .
2. Скорость второго автомобиля в момент начала полного торможения vю2 va1 0,5t3 j ,
где t3, j – время нарастания замедления и установившееся замедление второго автомобиля.
3. Путь полного торможения второго автомобиля
ST S v2ю2j 2 .
4. Расстояние, на которое переместился бы второй автомобиль до остановки от места наезда, если бы не произошло столкновения:
Sпн2 ST Sю2 ,
где Sю2 – длина следа юза, оставленного на покрытии вторым автомобилем перед местом столкновения.
5. Условие возможности для водителя первого автомобиля предотвратить столкновение, несмотря на несвоевременное торможение второго водителя:
Sуд1 So1 Sпн2 .
Если это условие соблюдается, то водитель первого автомобиля при своевременном реагировании на появление встречного автомобиля имел техническую возможность остановиться на расстоянии, исключавшем столкновение, несмотря на несвоевременное реагирование на препятствие водителя второго автомобиля.
Втакойжепоследовательностиопределяют, былалитакаявозможность
уводителя второго автомобиля.
Пример. На дороге шириной 4,5 м произошло встречное столкновение двух автомобилей – грузового ЗИЛ130-76 и легкового ГАЗ-3110 “Волга”. Как установлено следствием, скорость грузового автомобиля была примерно 15 м/с, легкового – 25 м/с.
При осмотре места ДТП зафиксированы тормозные следы. Задними шинами грузового автомобиля оставлен след юза длиной 16 м, задними ши-
168
нами легкового автомобиля – 22 м. В результате следственного эксперимента установлено, что в момент, когда каждый из водителей имел техническуювозможностьобнаружитьвстречныйавтомобильиоценить дорожную обстановку как опасную, расстояние между автомобилями было около 200 м. При этом грузовой автомобиль находился от места столкновения на удалении примерно 80 м, а легковой – 120 м.
Необходимо определить наличие технической возможности предотвратить столкновение автомобилей у каждого из водителей.
Для исследования приняты:
для автомобиля ЗИЛ-130-76:
T 1,4 |
с; t3 0,4 с; |
j 4,0 м/с2; |
для автомобиля ГАЗ-3110:
Решение. |
T 1,2 с; t3 |
0,2 с; |
j 5,0 м/с2. |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1. Остановочный путь автомобилей: |
|
|
|
|
|
|
||||||
грузового |
|
|
|
|
|
|
|
|
|
|
|
|
So |
vaT |
|
va 2 |
|
15 1,4 |
|
152 |
|
49,5 |
|||
|
2 j |
2 |
4,0 |
|||||||||
|
|
|
|
|
|
|
||||||
легкового |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
va 2 |
25 1,2 |
|
|
|
252 |
|
92,5 |
|
|
|
|
|
|
|
|
||||||
So |
vaT |
|
2 j |
|
2 5,0 |
|||||||
|
|
|
|
|
|
|
|
|||||
м;
м.
2. Условие возможности предотвращения столкновения при своевременном реагировании водителей на препятствие:
So So Sв Sв .
Проверяем это условие:
49,5 92,5 142,0 80 120 200 .
Условие выполняется, следовательно, если бы оба водителя правильно оценили создавшуюся дорожную обстановку и одновременно приняли правильное решение, то столкновения удалось бы избежать. После остановки автомобилей между ними оставалось бы расстояние
S 200 142 58 м.
Установим степень вины каждого водителя.
3. Скорость автомобилей в момент начала полного торможения:
169
грузового
vаю va 0,5t3 j 15 0,5 0,4 4,0 14,2 м/с;
легкового
vаю va 0,5t3 j 25 0,5 0,2 5,0 24,5 м/с.
4. Путь, пройденный автомобилями при движении юзом (полном торможении):
грузового
|
|
|
2 |
|
14,6 |
2 |
|
ST |
vаю |
|
|
|
26,5 м; |
||
2 j |
|
2 4,0 |
|||||
|
|
|
|
|
|||
легкового |
|
|
|
|
|
|
|
|
|
|
2 |
|
24,5 |
2 |
|
ST |
|
vаю |
|
|
|
60,0 м. |
|
|
2 j |
|
2 5,0 |
||||
|
|
|
|
|
|||
5. Перемещение автомобилей от места столкновения в заторможенном состоянии при отсутствии столкновения:
грузового
Sпн ST Sю 26,5 16 10,5 м;
легкового
Sпн ST Sю 60 22 38,0 м.
6. Условие возможности предотвращения столкновения у водителей автомобилей в создавшейся обстановке:
для грузового автомобиля
So Sпн Sуд ;
49,5 38,0 87,5 80,0 м.
Условие не выполняется. Следовательно, водитель автомобиля ЗИЛ- 130-76 даже при своевременном реагировании на появление автомобиля ГАЗ-3110 не имел технической возможности предотвратить столкновение.
для легкового автомобиля
So Sпн Sуд ;
92,5 10,5 103 120,0 м.
170