

1351
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
_______________________
Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования «Пензенский государственный университет
архитектуры и строительства» (ПГУАС)
В.А. Монахов
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
МАТРИЧНАЯ ФОРМА АНАЛИЗА СЛОЖНОГО ДВИЖЕНИЯ ТОЧКИ
Рекомендовано Редсоветом университета в качестве учебного пособия для студентов,
обучающихся по направлению 08.03.01 «Строительство»
Пенза 2014
УДК 531/534 ББК 22.21я73
М77
Рецензенты: доктор технических наук, профессор В.В. Коновалов (ПГТУ); кандидат технических наук, доцент М.Б. Зайцев(ПГУАС)
Монахов В.А.
М77 Теоретическая механика. Матричная форма анализа сложного движения точки: учеб. пособие / В.А. Монахов. – Пенза: ПГУАС, 2014. – 80 с.
Изложен материал, предусмотренный программой курса теоретической механики для технических вузов. Представлены теоретические аспекты и методика применения вычислительной техники при решении задач о сложном движении материальной точки. Изложение понятий кинематики, определение кинематических характеристик и свойств сложного движения точки сочетается с решением задач по данной теме. Основное внимание уделено приложению теории матричных преобразований систем координат при определении закона сложного движения и других кинематических характеристик точки, что способствует эффективному применению средств современной вычислительной техники в теоретической механике.
Учебное пособие подготовлено на кафедре «Механика» и предназначено для студентов высших учебных заведений, обучающихся по направлению 08.03.01 «Строительство».
©Пензенский государственный университет архитектуры и строительства, 2014
©Монахов В.А., 2014
2
ПРЕДИСЛОВИЕ
Теоретическая механика относится к разряду фундаментальных естественнонаучных дисциплин, методы исследований которой развивались в течение столетий. Основные положения механики приняли классическую форму. В частности, при изучении сложного движения материальных частиц, которое обсуждается в предлагаемом учебном пособии, приводятся известные теоремы о сложении скоростей и ускорений.
Появление средств вычислительной техники в сфере образования стимулирует разработку новых прогрессивных форм обучения. В связи с этим возникает необходимость в переложении теорем о сложении на язык машин, каковыми являются матричная алгебра и анализ. Их использование для описания сложного движения частицы позволяет составить процедуры автоматического вычисления скоростей и ускорений на ПЭВМ на основе закона сложного движения, который выводится на основе теории матричных преобразований систем координат. Синхронно с численным решением задачи в программах может быть предусмотрена также демонстрация компьютерного фильма о сложном движении частицы.
Внедрение подобных программ открывает широкие перспективы при изучении теоретической механики. Программы могут носить как обучающий, так и контролирующий характер. С их помощью значительно повышается эффективность освоения учебного материала, существенно сокращается время, затрачиваемое на выполнение или проверку контрольных заданий и т.п.
3

СЛОЖНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ
Когда вы видите капли дождя, скользящие по стёклам окна движущегося автомобиля, в котором находитесь, или наблюдаете, как на стройке башенный кран, поворачиваясь вокруг себя, одновременно перемещает груз по стреле, знайте, что пред вами не простое движение капли или груза, а сложное (рис. 1,а). Стекание частиц грязи по канавкам протектора шины катящегося колеса автомобиля, течение жидкости в шланге, когда вы переносите его с места на место (рис. 1, б) – тоже примеры сложного движения. Конструируя кран с оптимальными параметрами или разрабатывая рисунок протектора шины, инженер должен знать все характеристики движения с тем, чтобы обеспечить надёжную работу крана или безопасное движение автомобиля (вероятно, разлёт частиц грязи или камешков щебня дорожного покрытия при большой скорости машины
зависит от рисунка протектора). |
|
а |
б |
Рис. 1
1. Закон сложного движения точки
Изучение движения материальной точки связано с выбором точки зрения наблюдателя или системы координат, в которой оно может быть описано. Рассмотрим, например, падение предмета, выпавшего из рук пассажира движущегося автобуса. Очевидно, за движением предмета, как материальной точки, можно следить из двух позиций или в двух системах отсчета: 1) – в системе координат, связанной с автобусом, и 2) – с наблюдателем, стоящим на обочине дороги.
Конечно, движение предмета по отношению к автобусу является простым, а вот его движение относительно неподвижной системы - сложным, которое можно разложить на два: первое – движение относительно автобуса и второе – падение предмета, "сносимое" автобусом при его движении.
4

Определение 1. Сложным движением материальной точки называется движение точки, рассматриваемое или происходящее в двух и более системах координат, хотя бы одна из которых подвижна.
Покажем две системы координат: неподвижную, которую обозначим греческими буквами , и подвижную Охуz и рассмотрим движущуюся
точку М, положение которой определим радиус-векторами:
через r t – в подвижной системе координат и с помощью t – в
неподвижной (рис. 2).
Дополнительно введём и радиус-вектор начала подвижной системы координат 0 t , который также изменяется со временем.
Очевидно, движение точки М можно описать векторным способом, составив выражение
t 0 t r t . |
(1) |
Оно и характеризует закон сложного движения.
|
M |
ξ |
|
|
|
z ρ(t) |
y |
r(t) |
|
O |
|
ρ0 (t) |
o |
O ' |
θ |
|
x |
η
Рис. 2
Определение 2. Движение точки М относительно подвижной системы координат Охуz называется относительным.
Определение 3. Движение той точки подвижной системы координат, с которой в рассматриваемый (фиксированный) момент времени совпадает положение точки М, по отношению к неподвижной системе, называется переносным.
Определение 4. Движение точки М по отношению к неподвижной системе координат О1 называется сложным или
абсолютным.
5
2.Производная радиус-вектора r t
вподвижной системе координат
Очевидно, в подвижной системе координат радиус-вектор точки М
можно представить разложением |
|
|
|
|
|||
|
|
r t x t i y t j z t k . |
|
||||
Найдем производную r t по времени |
|
|
|
||||
|
d r |
dx i dy |
j dz k x di |
y dj |
z dk |
||
|
dt |
||||||
|
dt |
dt |
dt |
dt |
dt |
dt |
|
[ d r читается: дэ тильда эр] и назовем её полной производной.
Единичные орты i, j, k подвижной системы координат совершают повороты вокруг некоторой оси с одинаковой мгновенной угловой скоростью ; поэтому по аналогии с известной формулой Эйлера
ddtr r
справедливы равенства:
di i,
dt
dj j,
dt
dk k.
dt
Сучетом последних соотношений полная производная принимает вид
dr |
dr |
x i y j z k |
dr |
xi yj zk dr |
r . |
||
dt |
dt |
|
|
|
dt |
dt |
|
|
Производная |
|
|
|
|
||
|
|
|
d r |
dx i dy j dz k |
|
||
|
|
|
dt |
|
|||
|
|
|
dt |
dt |
dt |
|
|
называется локальной; она характеризует изменение радиус-вектора r в подвижной системе координат.
Произведение r называется конвективной частью полной производной радиус-вектора r .
Итак, полная производная вектора r , заданного в подвижной системе координат, находится по формуле
|
|
dr |
dr |
r . |
|
|
|
dt |
dt |
|
|
|
|
|
dr . |
||
Поскольку говорится о новом виде производной, то она и снабжена индексом «тильда», т.е. |
|||||
|
|
|
|
|
dt |
6
3. Теорема о сложении скоростей
Основанием для вывода формулы скорости точки М при сложном движении (рис. 2) служит закон сложного движения, представленный в форме (1)
t 0 t r t .
Взяв полную производную от обеих частей этого выражения
d |
|
d |
|
dr |
|
d |
|
dr |
r |
dt |
0 |
dt |
0 |
dt |
|||||
|
dt |
|
|
dt |
|
|
и назвав затем величину
r ddtr
относительной скоростью, а
e d 0 r dt
– переносной, значение скорости при сложном движении точки можно определить по формуле
a = r + e .
Таким образом, скорость точки при сложном движении равна сумме скоростей относительного и переносного движений точки.
7

4. Теорема о сложении ускорений (теорема Кориолиса)
Исходным соотношением для доказательства теоремы служит выражение
a = r + e .
Вычислив полную производную от обеих частей этого равенства, можно установить, что
d |
|
d |
|
d |
d |
|
d |
d |
r |
|
|
d |
|
d 2 |
|
|||
|
a |
|
r |
e |
|
r |
|
|
|
0 |
|
|
|
r r |
|
0 |
|
|
dt |
dt |
dt |
dt |
dt |
dt |
2 |
||||||||||||
|
|
dt |
|
|
dt |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
d |
r dr . |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
dt |
|
|
dt |
|
|
|
|
|
|
|
|
Оставляя без изменения три первых слагаемых*, следует продолжить вычисление производных в двух последних. В соответствии с правилом вычисления полной производной получим соотношение
d |
r |
dr |
d |
|
dr |
|
|
||
dt |
dt |
|
dt |
|
r |
dt |
r |
||
|
|
|
|
|
|
||||
d |
r dr |
r , |
dt |
dt |
|
т.к. 0 . |
|
|
Вспомнив к тому же, что ddt – это угловое ускорение, а
r ddtr
– относительная скорость, соотношение можно представить как сумму трёх слагаемых
r r + r .
Следовательно, полная производная теперь находится по формуле
d |
a |
d |
r r |
d 2 |
r r r . |
|
|
|
0 |
||||
dt |
dt |
dt2 |
||||
|
|
|
* Здесь принято во внимание тождество |
d |
d 0 |
|
|
d 2 0 , поскольку вектор |
|
t задан в |
|
|
|
|
dt |
|
dt2 |
0 |
|
|
|
dt |
|
|
|
|
|||
неподвижной системе координат.
8
Группируя слагаемые этой суммы и одновременно анализируя их смысл, можно установить, что ускорение точки при сложном движении, т.е. абсолютное ускорение точки при сложном движении складывается из трёх составляющих:
aa ar ae ak ,
где вектор
ar d r dt
является относительным ускорением,
ae d 2 0 r r dt
– переносным,
ak 2 r
– поворотным (кориолисовым) ускорением точки.
Этот вывод является содержанием теоремы Кориолиса: при сложном движении точки её ускорение складывается из трех частей: относительного, переносного и поворотного ускорений.
9
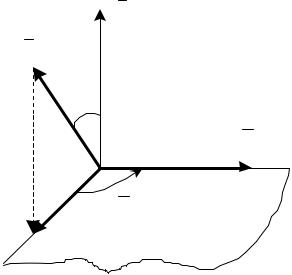
5. Определение направления поворотного ускорения (по правилу Жуковского)
Вектор поворотного ускорения равен
ak 2 r .
Определение модуля векторного произведения по формуле ak 2 r sin , r
подсказывает правило установления направления данного вектора ak .
В правой системе декартовых координат, каковой является обычно изображаемая (без оговорки, что она правая) система, следует изобразить векторы скоростей , r , угол между которыми обозначается через
(рис. 3).
Проектируя вектор r на плоскость P, перпендикулярную вектору , показывают его проекцию
rP r sin , r r sin . |
||
|
|
|
r |
|
|
|
|
|
|
ak |
|
|
|
|
rP |
2 |
|
P |
||
|
||
|
Рис. 3 |
|
Очевидно, это произведение содержится в определении модуля вектора ak . Поскольку вектор ak является векторным произведением векторов ,
r , то он должен быть перпендикулярен плоскости, проведенный через векторы , r . Следовательно, для определения направления вектора ak необходимо проекцию rP , лежащую в плоскости векторов , r ,
10