

Учебные пособия / Эдельштейн лекции по ТММ учебник
.pdf4) Подсчитываем КПД редуктора при ведущем водиле Н. Передаточное отношение редуктора — целое число, поэтому воспользуемся формулой (76 в):
Следует обратить внимание на то, что КПД редуктора Джемса больше КПД редуктора, составленного из тех же колес, но при неподвижном водиле и свободном колесе 3.
ЛЕКЦИЯ ОДИННАДЦАТАЯ
§ 12. Определение величины момента инерции маховика Iм, при котором степень неравномерности хода δ будет
не больше заданной (расчет маховика)
1°. Угловая скорость ведущего звена в пределах цикла установившегося движения не остается постоянной. Ее изменение оценивается коэффициентами δ или χ
При заданных значениях средней угловой скорости ωср и коэффициента неравномерности хода δ наибольшее ее значение по формуле (79) будет
 и наименьшее по формуле (79 а)
и наименьшее по формуле (79 а)
Чтобы значения угловой скорости не выходили за указанные пределы, на одном из валов машины (обычно, ведущем) устанавливается маховик.
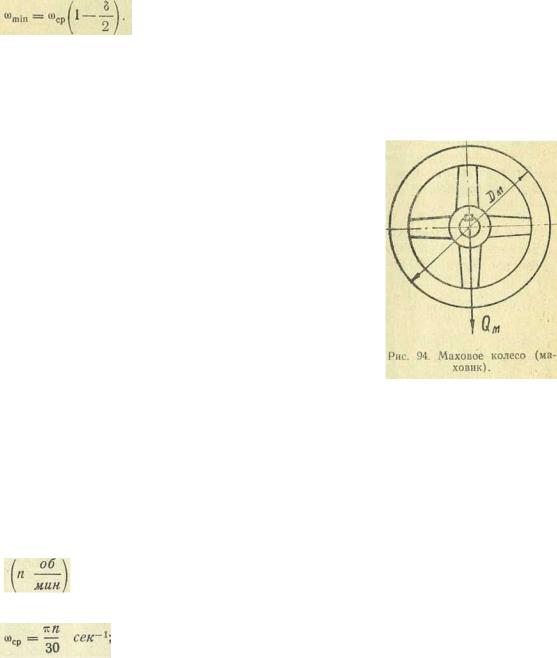
Маховиком (рис. 94) называется колесо с тяжелым ободом. Параметром, подлежащим определению, будет его момент инерции Iм. Установим связь между моментом инерции маховика, его весом QM и диаметром DM. Будем считать, что вся масса маховика сосредоточена по его наружному диаметру, тогда
 (87) или, так как g ~10 мсек-2, то
(87) или, так как g ~10 мсек-2, то
 (87 а) Произведение QM D2M называется маховым моментом и
(87 а) Произведение QM D2M называется маховым моментом и
 (87 б)
(87 б)
Формула (87 б) устанавливает искомую связь между IM, QM и DM
2°. Формула для определения момента инерции маховика выводится из уравнения энергий (58 6). Она записывается для того перемещения ведущего звена, при котором угловая скорость его изменяется от своего наибольшего значения (ωmах) до наименьшего (ωmin) (или, наоборот, от наименьшего до наибольшего).
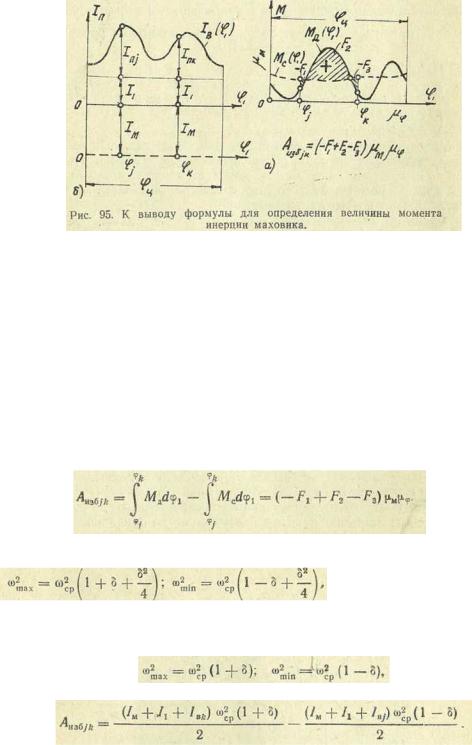
Известны следующие величины: 1) приведенные моменты движущих сил МД (φ1) и сил сопротивления М с (φ1 ) (рис. 95, а ) ; 2) приведенный момент инерции ведущего звена I1, 3) приведенный момент инерции масс ведомых звеньев механизма IВ (φ1) (рис. 95,6);
4) среднее число оборотов в минуту
ведущего звена или, что то же, средняя угловая скорость его
сек-1 ;
5) коэффициент неравномерности хода δ.
Предположим, что мы знаем те положения ведущего звена, где его угловая скорость достигает своих наибольшего и наименьшего значений.
Пусть при φ1 = φj ω1 = ωmin при φ1 = φk ω1 = ωmax.
Напишем уравнение энергии для перемещения ведущего звена, ограниченного положениями φj и φk, считая, что момент инерции маховика имеет значение Iм (рис. 95, б ) :
 (88)
(88)
Разность интегралов в левой части формулы (88), как известно, будет избыточной работой внешних сил ( М Д и М С ) на избранном интервале перемещения. Обозначим ее Аизбjk и величину ее найдем по графикам Мд(φ1) и Мс(φ1) (рис. 95, а):
(89)
Имея в виду формулы (79) и (79 а), определим значения
пренебрегая величиной  , окончательно запишем
, окончательно запишем
учитывая формулу (89) и значения ω2max и ω2min, формулу (88) перепишем так:
Решим записанное равенство относительно Iм:
 (90)
(90)
Формула (90) —основная для определения момента инерции Iм маховика, ее можно применить только тогда, когда известны те положения ведущего звена, где его угловая скорость достигает своих наибольшего и наименьшего значений.
Эти положения можно находить различными методами: Радингера, Мерцалова, Мерцалова — Гутьяра, Виттенбауэра, И. И. Артоболевского, Овакимяна. Одни из них дают приближенные решения, другие — точные. Мы воспользуемся методом Виттенбауэра.
3°. Диаграмма Виттенбауэра и ее свойства (рис. 96). Заданы функции МД(φ1) и
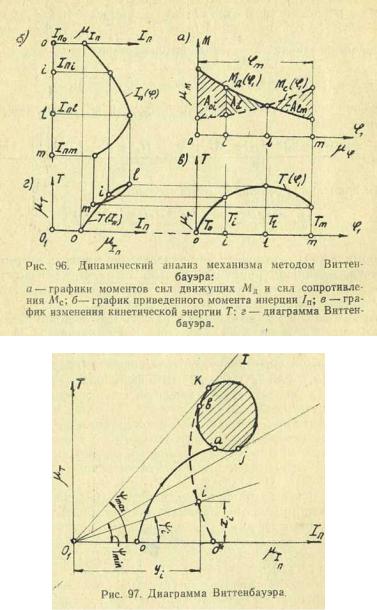
МС(φ1) (рис. 96, а) и функция /п (ф^ (рис. 96, б) (для удобства последующего решения оси координат графика Iп (φ1) повернуты на 90°).
Положим, что при φ1 = 0 ω1= 0 и построим зависимость T(φ1) известным нам способом (рис. 96, в).
Диаграммой Виттенбауэра называется зависимость кинетической энергии Т от приведенного момента инерции Iп, т. е. функция T (Iп)
Построим график этой функции, для чего из функций Iп(φ1) и T(φ1) графически исключим параметр φ1 (рис. 96, г).
Оси координат графика T (Iп) и начало координат его найдем, если продолжить оси абсцисс графиков Iп(φ1) и T(φ1) до их пересечения в точке О1,. Построение точек кривой Виттенбауэра видно из чертежа (рис. 96, б, в, г) (точки о, i , l, т) .
Свойства кривой Виттенбауэра (рис. 97) следующие:
I) она начинается и кончается на оси абсцисс, так как в начале движения и в конце его скорость ведущего звена равна нулю и, следовательно, кинетическая энергия тоже равна нулю (например, ветвь о а соответствует разгону, а ветвь о' b — выбегу);
2)для цикла установившегося движения (ввиду периодичности функций Iп(φ1) и T(φ1)) она образует замкнутый контур aba;
3)корень квадратный из тангенса угла ψi. наклона луча iO1 проведенного из любой точки i ее через начало координат О1 пропорционален угловой скорости ведущего звена в этом положении (i).

В самом деле, по формуле (60) (рис. 97)
Так как |
(91) |
4) наибольшая (ωmах) и наименьшая (ωmin) угловая скорость ведущего звена в цикле установившегося движения определятся тангенсами углов ψmax и ψmln. Угол ψmax образован лучом O1I, который касается сверху кривой Виттенбауэра, а угол ψmln — лучом O1II, касающимся ее снизу (рис. 97). Точки k. и j касания лучей O1I и O1II с кривой определят положения, где угловая скорость достигает своих наибольшего и наименьшего значений.
При установившемся движении (ωmах) и (ωmin) нам известны, поэтому
и так как
то
(92)
(92 а)
Решение задачи о нахождении положений ведущего звена, где его скорость приобретает значения (ωmах) и (ωmin), сведется к следующему:
1)строится диаграмма Виттенбауэра для цикла установившегося движения (рис.
98);
2)по формулам (92) и (92 а) находят значения тангенсов, а по ним углы ψmax и ψmln;
3)к кривой Виттенбауэра проводят лучи O1I и O1II, касающиеся ее сверху и снизу. Эти лучи проводятся под углами ψmax и ψmln. Точки k и j касания лучей O1I и O1II укажут искомые положения ведущего звена. Как видно из рисунка, для решения поставленной
задачи начало координат диаграммы Виттенбауэра знать необязательно.
4°. Расчет маховика (определение его момента инерции Iп по Виттеибауэру). Предполагаются заданными такие параметры: 1) схема механизма и его размеры, 2)
силы движущие и силы сопротивления, 3) массы и центральные моменты инерции
об
звеньев, 4) среднее число оборотов ведущего звена (п мин), 5) степень неравномерности
хода (δ).
Решение. 1) Вычерчиваем схему механизма в т положениях (обычно, т = 12).
2)Строим планы скоростей для этих положений.
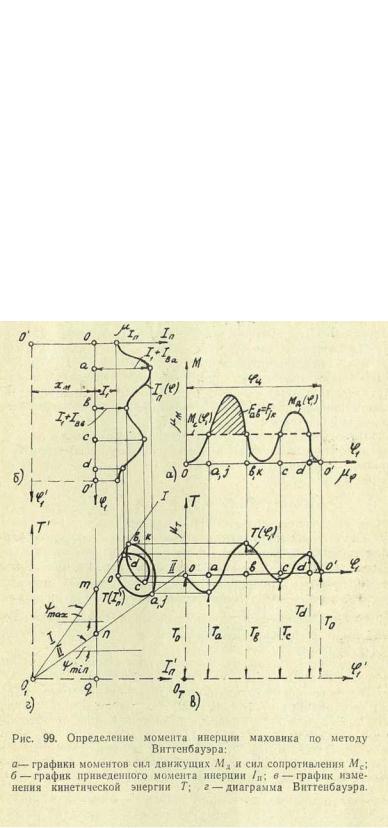
3)Приводим силы к ведущему звену (практически задают одну группу сил, например, для двигателей — движущие; для рабочих машин — сопротивления) и находим приведенный момент движущих сил (двигатели) или сил сопротивления (рабочие
машины). Для найденного момента Мд или Мс строим его график (рис. 99, а). Значение другого момента Мс (двигатели) или Мд (рабочие машины) находим из равенства работ сил движущих и сил сопротивления, предполагая эти моменты постоянными
 или
или  .
.
Значение найденного момента Мс (двигатели) или Мд
(рабочие машины) указываем на тех же осях координат, в которых строили график изменяющегося момента (рис. 99, а) (на рис. 99 показано решение задачи о маховике применительно к двигателю).
4)Приводим массы звеньев механизма к ведущему звену и строим график приведенного момента инерции механизма Iп(φ1), (Iп = I1+Iв) (рис. 99, б).
5)Строим график T(φ1) (рис. 99, в ) , его построение ведем от условного начала о, так как значение Т 0 неизвестно.
6)Строим диаграмму Виттенбауэра для одного динамического цикла машины (рис.
99, г).

7)Вычисляем значения тангенсов углов ψmax и ψmln по формулам (92) и (92 а), по этим значениям находим углы ψmax и ψmln.
8)Проводим к кривой Виттенбауэра касательные сверху и снизу под найденными углами (линии I—I и II—II) (рис. 99, г). Точки касания этих прямых k и j определят
положения ведущего звена, где его угловая скорость будет иметь значения (ωmах) и (ωmin) В нашем примере положение k совпадает с положением b(ωmах), положение j совпадает с позицией а ωmin).
9)Находим величину момента инерции маховика Iм:
а) аналитическое решение. Подсчитываем Iм по формуле (90), величины, входящие в эту формулу, находим по графикам (рис. 99, а) и (99,6):
б) графическое решение. Продолжаем лучи I —I и I I —I I (рис. 99, г ) до их пересечения в точке О1, и тем самым находим начало координат О1 кривой Виттенбауэра. Проводим оси координат этой кривой О1I'п и О1Т'. На графике (рис. 99,6)
Iп(φ1) определится отрезок χм, пропорциональный IП . Искомый момент инерции маховика
Iп = xµIп. Ввиду того, что углы ψmax и ψmln мало разнятся один от другого, то начало
координат 01 кривой Виттенбауэра выходит далеко за пределы поля чертежа, и приведенное решение практически неприменимо.
Для получения практически доступного решения продолжим ось абсцисс графика Iп(φ1) (ось o φ1) до пересечения с лучами I—I и II—II и осьо абсцисс диаграммы Виттенбауэра (рис. 99, г).
Из треугольника o1mq имеем mq = хM tg ψmах. из треугольника o1nq — nq == χм tg ψmln Разность отрезков mq и nq равна mn,поэтому mn = хM (tg ψmax - tg ψmln), откуда
В (формуле в знаменателе стоит разность близколежащих величин, поэтому вычислять момент инерции маховика по ней не рекомендуется, но если в нее вставить значения тангенсов по формулам (92 и 92, а), то окончательно получим
 (93)
(93)
10) Определяем мощность машины по формуле (69 а):
(в начале расчета мы допустили, что Мс =const).
5°. Расчет момента инерции маховика (точнее, определение положений ведущего звена, где его угловая скорость принимает значения ω m а х и ωm i n ) значительно упрощается, если: а) приведенный момент инерции масс ведомых звеньев механизма постоянен (это будет при постоянном передаточном отношении механизма) и б) этот момент инерции мал по сравнению с моментом инерции маховика.
Расчетная формула (93) примет вид: при Iв = const,
 (94)
(94)
при IB ~ 0
 (94 а)
(94 а)
В этих случаях искомые положения ведущего звена, где угловая скорость имеет значения ωm а х и ωm i n , находят по диаграмме (графику) T(φ1). Где кинетическая
энергия имеет наибольшее значение, там и угловая скорость будет наибольшей и при наименьшем значении кинетической энергии угловая скорость примет тоже наименьшую величину. Рассмотренные методы расчета момена инерции маховика справедливы для случая, когда приведенные моменты сил движущих и сил сопротивления зависят от координаты ведущего звена ( Mд (φ1) и Мс (φ1)). Случай определения момента инерции маховика, когда моменты зависят от скорости, разобран в книге [2].
Взаключение укажем, что назначение маховика состоит не только в том, чтобы удерживать угловую скорость в назначенных пределах.
Для некоторых машин, например прессов, маховик нужен для накопления кинетической энергии при холостом ходе машины с тем, чтобы затем израсходовать ее на технологический процесс при рабочем ходе.
Внекоторых механизмах, например кривошипно-ползунном, при приложении движущего усилия к ползуну, момент па кривошипе в крайнем положении механизма равен нулю. Для прохождения механизма через это положение у него должен быть достаточный запас кинетической энергии. Этот запас аккумулируется в маховике.
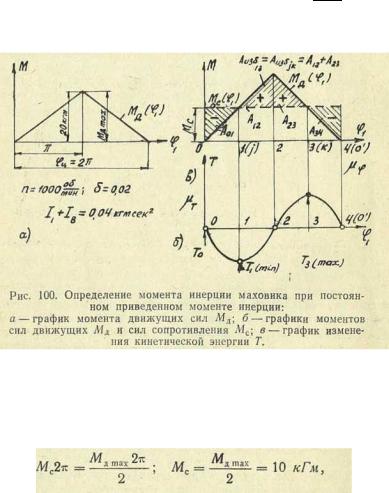
Пример. К ведущему звену приложен приведенный движущий момент Мд (φ1),
изменяющийся в соответствии с графиком (рис. 100, а); его наибольшее значение Мд mах =20 кГм. Момент сопротивления Мс постоянен на всем цикле установившегося движения (протяженность цикла 2π). Приведенный момент инерции Iп = I1 + Iв = 0,04
об
кГмсек2 постоянен. Число оборотов ведущего звена п = 1000 мин. Степень неравномерности хода δ = 0,02.
Найти момент инерции маховика Iм, который обеспечит заданную степень неравномерности хода δ.
Решение. 1) Строим график движущего момента Мд (φ1) (рис. 100,6).
2) Подсчитываем значение момента сопротивления Мс исходя из равенства работ момента движущего и момента сопротивления:
график этого момента показываем в тех же осях координат, где построен график МД (φ1) (рис. 100, б).
3)Строим график изменения кинетической энергии (рис. 100, в), предварительно
10 π
разметив на графике моментов (рис. 100, б) избыточные работы: A0 1 = — 2 2 = — 2,5π
кГм; А1 2 = + 2,5π; А23 = + 2,5π; А3 4 = — 2,5π.
4) Находим положения, где кинетическая энергия достигает своих наименьшего (положение 1) и наибольшего (положение 3) значений; избыточная работа на этом интервале определится площадью треугольника с основанием π и высотою 10 кГм:
Аизб12 =Аизбjk ==: 5π кГм.
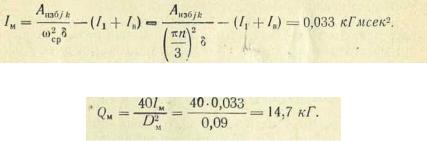
5)Подсчитываем момент инерции маховика по формуле (94):
6)Задаемся диаметром маховика DM = 0,3 м и по формуле (87 б) определяем его вес QM :
ЛЕКЦИЯ ДВЕНАДЦАТАЯ
Тема III. СИЛОВОЙ АНАЛИЗ МЕХАНИЗМОВ
§ 13. Задачи раздела. Внешние усилия (силы и моменты), Приложенные к звеньям механизма
1°. В разделе рассматриваются задачи, которые предшествуют вопросу расчета частей механизма на прочность. Этих задач две: в первой определяются внешние усилия, приложенные к звеньям механизма, во второй — реакции (давления) в кинематических парах механизма, обусловленные внешними усилиями. Реакции в кинематических парах (в связях) находятся для движущихся звеньев (тел), поэтому согласно принципу Даламбера ко всем внешним усилиям, приложенным к звеньям механизма, следует добавлять инерционную нагрузку этих звеньев.
Расчет реакций в кинематических парах, если принята во внимание инерционная нагрузка, называется кинетостатическим.
Само собой разумеется, что, используя принцип независимости действия сил, можно находить реакции не от всей нагрузки, а только от той ее части, которую желательно учесть при расчете.
2°. К внешним усилиям относятся следующие:
Для механизмов рабочих машин силы или моменты, на преодоление которых применен механизм (силы тяжести в грузоподъемных машинах, силы резания в станках по обработке материалов резанием, «шарнирный» момент в механизме управления рулями самолета и т. д.). Момент на входном валу, передающийся от двигателя, и т. д.
Для механизмов двигателей усилия, приложенные к звеньям, воспринимающим на себя действие рабочего тела (поршни, лопатки турбин и т. д.); сопротивления, приложенные к выходным звеньям (валам) двигателей, и т. д. Кроме того, если они соизмеримы с остальными нагрузками, то должны приниматься во внимание силы тяжести звеньев.
Для обеих групп машин и механизмов, входящих в них, надо учитывать инерционные усилия их звеньев.
В нашем курсе все перечисленные усилия, кроме инерционной нагрузки, считаются заданными. При решении второй задачи принимают во внимание силы трения, которые всегда имеют место в кинематических парах механизма. Порядок их учета будет указан позже.
§ 14. Инерционная нагрузка, ее подсчет и уравновешивание
1°. Инерционная нагрузка одного звена является нагрузкой распределенной, и при расчете звеньев на прочность об этом никогда не следует забывать. Если решается задача об определении реакций в кинематических парах механизма, то ее обычно заменяют экв ивалентной сосредоточенной.
Для одного звена эта нагрузка сводится к силе инерции
 (95)
(95)
где т — масса звена; as —ускорение центра тяжести звена, (эта сила приложена в центре тяжести звена и направлена противоположно ускорению центра тяжести звена) и моменту от пары сил инерции или, иначе, инерционному моменту:
 (95 а)
(95 а)