

Проектирование мехатронных узлов Божко
.pdfРеостатное регулирование частоты |
|
Полюсное регулирование частоты |
вращения |
|
вращения |
|
|
|
Способы и схемы регулирования частоты вращения двигателей постоянного тока. Потери мощности в машине постоянного тока
Якорное регулирование частоты вращения
https://electrik
am.com/reguli rovanie-chast oty-vrashheniy a-dvigatelej-n ezavisimogo-v ozbuzhdeniya/
и дальше еще через несколько слайдов
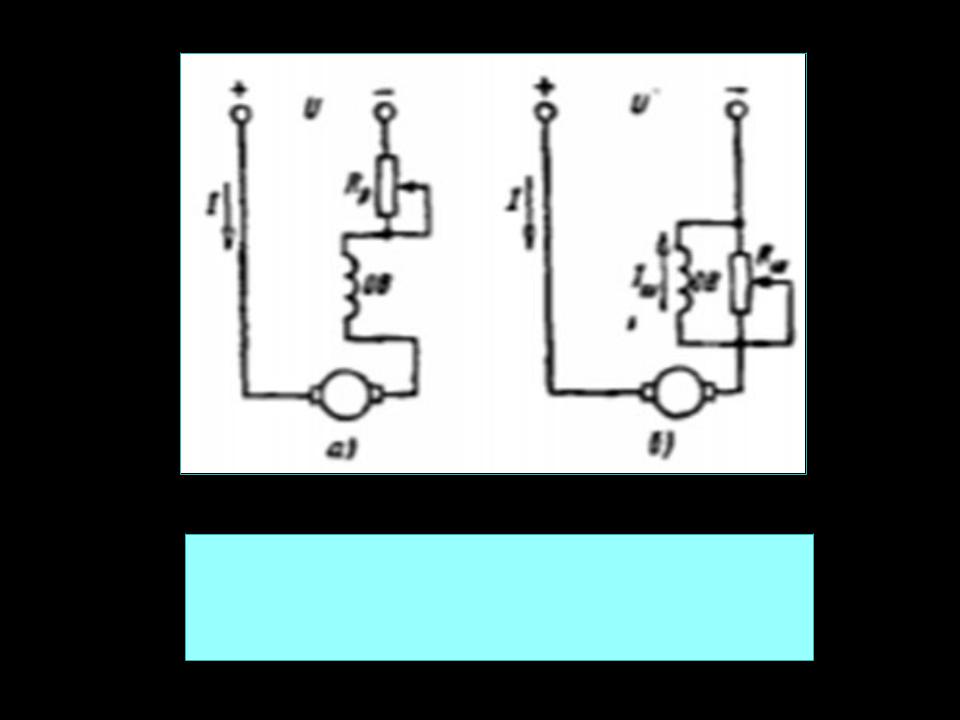
Схемы регулирования частоты вращения двигателей последовательного возбуждения:
а - изменение подводимого напряжения; б - шунтированием обмотки возбуждения.

Потери мощности в машине постоянного тока
Преобразование энергии в машинах постоянного тока сопровождается потерями энергии. В МПТ можно выделить четыре источника потерь.
Во-первых, обмотка возбуждения обладает определенным электрическим сопротивлением. Ток в этой обмотке создает электрические потери, пропорциональные квадрату тока и сопротивлению:
∆pв = I2в Rв
Во-вторых, аналогичные потери имеют место в обмотке якоря. Они зависят от тока якоря, т.е. изменяются с изменением режима работы машины:
∆pя = I2я Rя
Электрические потери в якоре в номинальном режиме работы составляют около половины всех потерь.
В-третьих, при вращении якоря в магнитном поле возбуждения его сердечник циклически перемагничивается. При этом, как известно из теории магнитных цепей, возникают магнитные потери в магнитопроводе (∆pмаг), которые складываются из потерь на гистерезис и вихревые токи в сердечнике. Для уменьшения этих потерь магнитопровод якоря выполняется шихтованным из листов электротехнической стали. Магнитные потери составляют от 1 до 3 %.
В-четвертых, при вращении якоря возникают потери от трения в подшипниках, трения щеток о коллектор, трения вращающихся частей о воздух (вентилляционые потери), которые объединяются в механические потери (∆pмех) и составляют от 1 до 2%.

Полезная мощность образуется из потребляемой за вычетом потерь. Энергетический баланс двигателя постоянного тока иллюстрируется диаграммой.
Полезная мощность двигателя постоянного тока определяется вращающим моментом М на его валу и частотой вращения n:
P2 = Pмех = (M·n)/ 9,55, [Вт]
Коэффициент полезного действия машины определяется соотношением полезной и потребляемой мощностей:
К.п.д. машины постоянного тока зависит от мощности. При номинальной мощности машины 100кВт номинальный к.п.д. 93-96%, а при номинальной мощности 100Вт – 60-65%. Следует иметь в виду, что номинальной мощностью считается полезная мощность, т.е. отдаваемая потребителю: Pном = P2ном .

Основы разработки приводов мехатронных систем
ПРЕЗЕНТАЦИЯ 8
Божко Юрий Валентинович
YVBozhko@mephi.ru
ybozhko@gmail.com

Пуск двигателя постоянного тока
Особенность пуска двигателя постоянного тока – сильное превышение пускового тока якоря над номинальным значением. Это объясняется тем, что в момент пуска, когда частота вращения равна нулю, противо ЭДС в обмотке якоря не индуцируется. Как следует из выражения для ЭДС обмотки якоря, при n=0
Eя = CeФвn = 0 .
Всоответствии с уравнением электрического состояния цепи якоря
U = Eя + I яRя .
при Eя = 0 пусковой ток якоря Iя,пуск определяется полным напряжением источника и небольшим сопротивлением обмотки якоря и значительно больше номинального.
При этом двигатель развивает большой пусковой момент:
Мпуск = СМФв I я,пуск>Мном .
Большой пусковой момент играет положительную роль, т.к. уменьшает время пуска. Однако, значительный пусковой ток ( I я,пуск = (8 ÷10 )I я,ном ) может привести к перегреву и разрушению обмотки.

Для ограничения пускового тока в цепь якоря включают пусковой реостат с сопротивлением Rп. Тогда пусковой ток
Величина Rп выбирается такой, чтобы ток якоря не превышал кратковременно допустимого значения:
I я,пуск = ( 2 ÷ 2,5 )I я,ном.
По мере нарастания скорости вращения и, следовательно, возрастания противоЭДС, уменьшения якорного тока, части реостата шунтируются. В конце разгона реостат полностью выводится, и двигатель выходит на естественную механическую характеристику.
Пуск ДПТ с помощью пускового реостата: а – ДПТ с параллельным возбуждением; б – ДПТ с последовательным возбуждением

Другой способ ограничения пускового тока – уменьшение напряжения питания в цепи якоря. Для этого якорь ДПТ подключается к источнику регулируемого напряжения. По мере разгона двигателя напряжение увеличивают (вручную, или автоматически) от нуля до номинального значения.
Обычно вывод на естественный режим осуществляется с помощью схемы управления. Различают следующие способы пуска: 1) по времени; 2) скорости; 3) якорному току; 4) противоЭДС. Имеются соответствующие схемы пуска и пускорегулирующая аппаратура.
Реверс – это изменение направления вращения ДПТ. Для реверса ДПТ с электромагнитным возбуждением достаточно изменить направление тока в якорной обмотке при сохранении направления тока в обмотке возбуждения или наоборот.

Способы и схемы регулирования частоты вращения двигателей постоянного тока. Потери мощности в машине постоянного тока
Регулирование частоты вращения двигателя постоянного тока
Для анализа способов регулирования частоты вращения обратимся к уравнению механической характеристики ДПТ:
Как видно, при неизменном моменте на валу можно регулировать частоту вращения тремя способами:
-изменением магнитного потока Фв, -изменением сопротивления в цепи якоря Rя,
-изменением напряжения U, приложенного к якорю.
Механическая характеристика при номинальном токе возбуждения и номинальном напряжении якоря называется естественной механической характеристикой.

Способ регулирования изменением магнитного потока Фв называется полюсным регулированием. Магнитный поток возбуждения меняется путем регулирования тока возбуждения. Для этого в цепь обмотки возбуждения включается регулировочный реостат или регулятор напряжения. В соответствии с выражением для частоты вращения холостого хода:
с уменьшением тока возбуждения частота вращения холостого хода увеличивается. Эта зависимость называется регулировочной характеристикой и показана графически на рисунке
Регулировочная характеристика ДПТ