

4. Исследование сп-модели путем построения дерева достижимых разметок
Дерево достижимости вручную:

Рисунок 3. Дерево достижимости, построенное вручную
Дерево достижимости через ПО:

Рисунок 4. Дерево достижимости через ПО
5. Для устранений недостатков изменим схему Петри, как показано на рисунке 5.

Рисунок 5. Изменения в сети Петри
В сеть Петри были внесены изменения:
Удален переход P5 в T4
Добавлен переход из P6 в T5
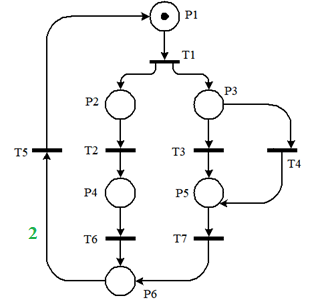
Рисунок 6. Сеть Петри после изменений
6. Исследование изменной сп-модели с помощью матричных методов и ддр
Для нахождения функции инцидентности следует использовать формулу: F:РхT;
В результате получим матрицу:
F |
Т1 |
Т2 |
Т3 |
Т4 |
Т5 |
Т6 |
Т7 |
Р1 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
Р2 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
Р3 |
0 |
0 |
1 |
1 |
0 |
0 |
0 |
Р4 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
Р5 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
Р6 |
0 |
0 |
0 |
0 |
2 |
0 |
0 |
Для нахождения функции инцидентности следует использовать формулу: H:TхP;
В результате получим матрицу:
HT |
Т1 |
Т2 |
Т3 |
Т4 |
Т5 |
Т6 |
Т7 |
Р1 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
Р2 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
Р3 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
Р4 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
Р5 |
0 |
0 |
1 |
1 |
0 |
0 |
0 |
Р6 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
Начальная разметка (µ0) выглядит следующим образом: µ0 (1;0;0;0;0;0)
Исследование сп-модели на основе матричных методов
С помощью матричных методов можно показать, что если СП живая и ограниченная, то она должна быть последовательной и инвариантной. Данные свойства недостаточны для утверждения живости и ограниченности СП. Однако их полезно проверить исходя из матриц инцидентности, так как если одно из этих свойств не подтверждается, то можно заключить, что описываемая система содержит некоторые недоработки.
Введем в рассмотрение матрицу С, которая поучается следующим образом: C=HT-F, где HT - транспонированная матрица H.
Пусть размерность С равна n x m , где m и n - мощности множеств Р и Т, тогда
С =

-1 |
0 |
0 |
0 |
1 |
0 |
0 |
1 |
-1 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
-1 |
-1 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
-1 |
0 |
0 |
0 |
1 |
1 |
0 |
0 |
-1 |
0 |
0 |
0 |
0 |
-2 |
1 |
1 |
С =
Рассмотрим матричное уравнение: y*C=0, где у – вектор, размерность которого равна n. Согласно этому уравнению, получаем:

Решим систему уравнений методом Гаусса:
Исходя из исходных уравнений получаем:
y5 = y6
y4 = y6
y2 = y4
y3 = y4
y2 = y3
Следовательно, y5 = y6 = y4 = y2 = y3. Для нахождения y1, выразим одно уравнение через другое:

Следовательно, y1 = 2 y2 или y1 = 2y6
-
0
0
0
0
0
0
2
1
1
1
1
1
2
1
1
1
1
1
Рассмотрим матричное уравнение: C*x=0, где х – вектор, размерность которого равна m. Согласно этому уравнению, получаем:
Решим систему уравнений методом Гаусса:
Исходя из исходных уравнений получаем:
x1 = x2
x2 = x5
x3 = x5 –x4
x5 = x6
x7 = x3 + x4
Следовательно, x1 = x2 = x5 = x6. Для нахождения x3 , x4 ,x7,выразим одно уравнение через другое:
x6 = -x7 – 2x5 = -x7+2x6 =>
x6 = x7
Выбираем в качестве базовых переменных x3 и x4. Построим таблицу значений:
-
0
0
0
0
0
0
0
1
1
1
0
1
1
1
1
1
0
1
1
1
1
2
2
1
1
2
2
2
Вывод
На основании векторов Y и X можно сделать вывод, что мы имеем положительную полную p-цепь и t-цепь.