

2.1.2. Особенности дроссельного магнитного усилителя
Для оценки свойств магнитных усилителей пользуются статическими характеристиками или характеристиками управления, под которыми понимают зависимость тока нагрузки Iн от тока управления Iу. Поскольку сигнал на выходе переменный, то по вертикальной оси откладываются действующие значения тока нагрузки. Исходя из работы дроссельного магнитного усилителя, такая характеристика построена и показана на рис. 2.1.1,б. Характеристика нелинейная. Нелинейность в начале характеристики имеет место потому, что при малых Iу намагничивание сердечника недостаточно эффективно. Нелинейность в конце характеристики объясняется тем, что при больших токах Iу наступает режим насыщения пермаллоевого сердечника.
Таким образом, по работе магнитного усилителя можно сделать следующие выводы:
а) рабочая обмотка с сердечником представляет собой дроссель с изменяющимся индуктивным сопротивлением, и поэтому такой усилитель называется дроссельным;
б) ток нагрузки и выходное напряжение создаются источником переменного напряжения (источником питания), за счет энергии которого происходит усиление сигнала;
в) усиление сигнала обеспечивается также применением сердечника из пермаллоя, что позволяет сравнительно небольшим по мощности входным сигналом управлять мощным сигналом на выходе. Отсюда еще одно название дроссельного магнитного усилителя — управляемый дроссель.
В качестве нагрузки магнитных усилителей могут быть обмотки электродвигателей, реле, выходных трансформаторов н т. п, Простая схема дроссельного магнитного усилителя использована для изучения принципа действия, по практического применения она не нашла из-за следующих недостатков:
влияния рабочей обмотки на управляющую за счет взаимоиндукции, Ток в рабочей обмотке создаст переменный магнитный поток, который наводит в управляющей обмотке э.д.с. самоиндукции. Поэтому в цели одновременно с постоянным током входного сигнала будет протекать и переменный ток;
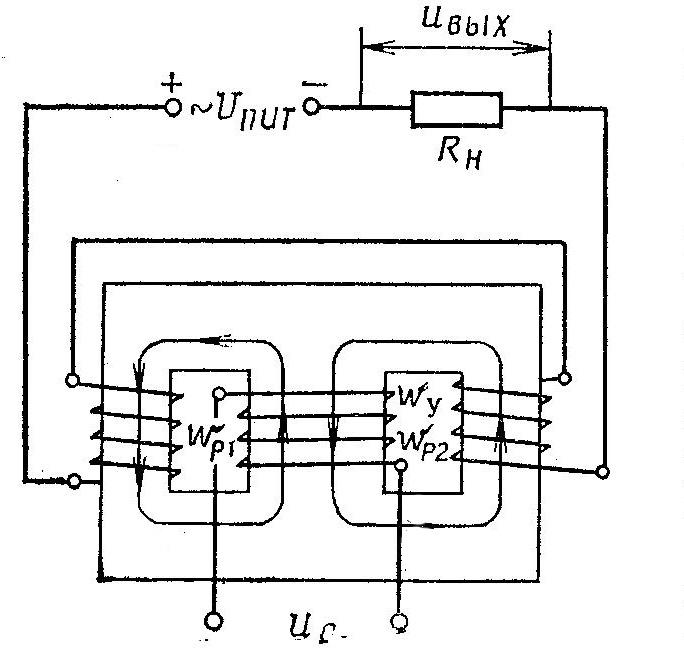 Рис.
2.2
Рис.
2.2
неспособности реагировать на полярность входного сигнала (рис, 2.1.1,б). Ток в цепи нагрузки зависит только от величины тока управления, но не от его полярности. Такие усилители получили название одпотактных в отличие от двухтактных, которые реагируют на величину и на полярность входного сигнала;
наличия начального сигнала на выходе (при отсутствии входного сигнала),
Первый недостаток фактически ликвидирует управляющее
действие входного сигнала и поэтому должен быть устранен в любой другой практической схеме.
Остальные недостатки устраняются в необходимых случаях.
2.2 Трехстержневой магнитный усилитель.
Для устранения влияния рабочей обмотки на управляющую применяется схема магнитного усилителя с трехстержнепым сердечником (рис. 2.2), Две рабочие обмотки размещены на крайних стержнях, а управляющая — на среднем.
Рабочие обмотки включены так, что создаваемые ими переменные магнитные потоки в крайних стержнях складываются, а в среднем—вычитаются,
При полной компенсации в среднем стержне в любой момент времени переменный магнитный поток вообще не проходит. Поэтому э.д.с. взаимоиндукции в управляющей обмотке усилителя не возникает.
В некоторых схемах усилителя для устранения влияния рабочей обмотки на управляющую в цепь управляющей обмотки включают дроссель с большим индуктивным сопротивлением, который за счет возникновения в пе.м э. д. с. самоиндукции оказывает переменному току значительное сопротивление. Но дроссель не устраняет полностью влияния рабочей обмотки, а только снижает,
Кроме того, дроссель обладает и активным сопротивлением, а следовательно, входной сигнал потребуется большей мощности и коэффициент усиления уменьшится.