

ЦОС учебник
.pdfR- < z < R+ ,
то можно вычислить реализуемую часть, разложив его на простые дроби. Действительно, в общем случае (см. формулу (6.34)):
|
|
Nl |
C jl |
|
|
|
F ( z ) = ∑dk z-k + ∑ ∑ |
|
, |
||
|
|
|
|||
|
k |
l j=1 (1 − pl z-1 )j |
|
||
где k, l – |
индексы, |
принадлежащие |
некоторым конечным |
||
множествам, |
по которым производится |
суммирование, pl – |
|||
полюсы кратности Nl . Реализуемая часть получится, если взять из этого разложения только те слагаемые, которые соответствуют последовательностям, отличным от нуля при n ³ 0 :
X ( z ) |
= |
|
d |
|
z-k + |
|
|
|
|
|
Nl |
C jl |
|
, |
|
∑ |
k |
|
|
∑ |
∑ |
|
|||||||||
|
|
|
|
||||||||||||
|
|
R |
|
|
|
|
(1 − pl z |
-1 )j |
|||||||
|
|
k³0 |
|
|
|
l: |
|
pl |
|
£R− |
j=1 |
||||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||
– то есть часть дельта-импульсов и правосторонние экспоненты. Итак, возвращаясь к задаче восстановления, если наблюдаемый
сигнал g (n) – |
белый |
шум с |
единичной дисперсией, то |
|
характеристики |
оптимального |
БИХ-фильтра, |
заданные |
|
соотношениями (6.53) и (6.54), могут быть записаны в форме: |
||||
|
hвосст (n) = B fg |
(−n) , |
(6.57) |
|
|
|
|
R |
|
|
Hвосст |
( z ) = Φ fg (z-1 ) . |
(6.58) |
|
|
|
|
|
|
|
|
|
R |
|
На практике, как уже говорилось, наблюдаемый сигнал g (n) не
является белым шумом. Но мы можем превратить его в таковой, пропустив через специально рассчитанную ЛИС-систему – “ отбеливающий” фильтр. При этом вся процедура восстановления приобретает вид, показанный на Рисунке 6.7, то есть будет представлять собой последовательное соединение отбеливающего и восстанавливающего фильтров.
153

Рисунок 6.7 - Физически-реализуемый оптимальный восстанавливающий фильтр
Hвосст ( z )
Пусть Hотб ( z ) – передаточная функция отбеливающего фильтра, а w(n) – последовательность на его выходе. Тогда:
Hвосст ( z ) = Hотб ( z ) Φ fw (z |
−1 ) . |
(6.59) |
|
|
|
|
R |
|
Выразим входящие в (14.58) z-преобразования через известные нам характеристики. Во-первых, определим передаточную функцию отбеливающего фильтра. По смыслу его применения, должно быть:
Φw ( z ) = Hотб ( z ) Hотб (z−1 )Φg ( z ) = 1
или
Hотб ( z ) Hотб (z−1 )= |
1 |
. |
(6.60) |
|
Φ g ( z ) |
||||
|
|
|
Здесь необходимо решить задачу факторизации функции Φ g ( z )
(см. п.8.4), то есть представить ее в виде |
|
Φ g ( z ) = Φ+g ( z ) Φ+g (z−1 ) , |
(6.61) |
где Φ+g ( z ) – передаточная функция физически реализуемой ЛИС –
системы, имеющая нули расположенные внутри единичной окружности. Последнее требование обусловлено тем, что из (6.60) и (6.61) мы получаем:
Hотб ( z ) = |
1 |
, |
(6.62) |
Φ+g ( z ) |
и упомянутые нули (ставшие теперь полюсами) обеспечат устойчивость отбеливающего фильтра.
154
Во-вторых, вычислим взаимный энергетический спектр последовательностей на входе и на выходе второго блока процедуры, показанной на Рисунке 6.7. В соответствии с (3.62),
Φ fw ( z ) = Φ fg ( z ) Hотб ( z ) = |
Φ fg ( z ) |
. |
||
Φ+g |
( z ) |
|||
|
|
|||
Подставив (6.62) и (6.63) в (6.59), окончательно получаем:
Hвосст ( z ) = |
1 Φ fg (z−1 ) |
||||||
|
|
|
|
|
|
. |
|
Φ+g |
( z ) |
Φ+g |
(z |
−1 ) |
|||
|
|
|
|
|
|
|
R |
(6.63)
(6.64)
Пример |
6.3. |
|
|
Построим |
|
|
|
|
|
физически |
реализуемый |
|||||||||||||||||||||
восстанавливающий |
БИХ-фильтр |
|
|
|
для |
экспоненциального |
||||||||||||||||||||||||||
коррелированного |
сигнала, |
|
искаженного |
статистически |
||||||||||||||||||||||||||||
независимым белым шумом, то есть для модели наблюдения. |
||||||||||||||||||||||||||||||||
В силу независимости последовательностей в модели |
||||||||||||||||||||||||||||||||
наблюдения имеем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
Bg (m) = B f (m) + Bv (m) . |
|
|
|
|||||||||||||||||||||||
Отсюда, переходя к z – преобразованиям, получаем: |
|
|
||||||||||||||||||||||||||||||
Φ g ( z ) = Φ f ( z ) + Φv ( z ) = |
|
|
|
|
|
|
|
|
|
+ α − (z + z−1 ) |
||||||||||||||||||||||
|
|
|
|
|
σ2f |
(1− ρ2 ) |
|
|
|
1 |
||||||||||||||||||||||
|
|
|
|
|
2 |
|
|
|
2 α |
|||||||||||||||||||||||
|
= |
|
|
|
|
|
|
|
|
|
|
+ σv |
|
= σv |
|
|
, |
|||||||||||||||
|
(1− ρ z−1 )(1− ρ z ) |
1 |
+ ρ − (z + z−1 ) |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ρ |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ρ |
|
< |
|
|
z |
|
< |
|
1 |
|
|
, |
|
|
|
|
|
|
(6.65) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ρ |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где значение параметра α определяется из уравнения |
|
|
||||||||||||||||||||||||||||||
|
|
1 |
|
+ α = d 2 |
1 |
− ρ + |
1 |
+ ρ |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
α |
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
ρ |
|
|
|
|
ρ |
|
|
|
|
||||||||||||||
с условием |
|
α |
|
< 1 . Решение этого уравнения дает: |
|
|
||||||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
155 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
1 |
2 |
|
4r2 |
|
|
||||
|
|
|
2 |
|
2 |
|
2 |
|
|
|
|
|
|
|
||||||
a = |
|
1 |
+ r |
|
+ d |
|
(1 - r |
|
) 1 |
- |
1 |
+ |
|
|
+ |
|
|
|
. |
(6.66) |
|
|
|
|
d 2 |
|
|
||||||||||||||
|
2r |
|
|
|
|
|
|
|
|
|
|
|
|
d |
2 (1 - r2 ) |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Формулу (6.65) |
|
можно представить |
||
сомножителей: |
|
|
(1 - a z−1 )( 1 - az ) |
|
F ( z ) = s2 |
r |
|||
a |
(1 - r z−1 )( 1 - r z ) |
|||
g |
v |
|||
|
|
|||
ввиде "симметричных"
,r < z < r1 ,
после чего решение задачи факторизации становится очевидным:
|
|
|
|
|
|
|
1 - a z−1 |
|
|
|
|
|
|
|
|
|
|
F+ |
( z ) = |
r |
|
s |
|
, |
|
a |
|
<1, |
|
r |
|
<1 . |
(6.67) |
||
|
|
|
|
|
|
||||||||||||
|
|
1 - r z−1 |
|||||||||||||||
g |
|
|
a |
v |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Передаточная функция (6.62) отбеливающего фильтра здесь равна:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
× |
1 - r z−1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Hотб |
( z ) = |
1 |
|
|
= |
|
|
|
a |
, |
|
|
|
|
|
|
|
z |
|
|
> |
|
|
|
|
|
a |
|
. |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
F+g ( z ) |
|
|
|
|
|
r sv |
|
|
1 - a z−1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Далее |
определим |
|
|
взаимный |
энергетический |
|
|
|
|
|
спектр |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
последовательностей: |
|
|
|
|
|
(1 - r2 )s2f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
F fg ( z ) = F f ( z ) = |
|
|
|
|
|
, |
|
|
|
r |
|
|
|
|
|
|
|
< |
|
|
z |
|
< |
|
|
|
|
1 |
|
|
|
|
, |
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
(1 - r z−1 ) |
(1 - r z ) |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
и физически реализуемую часть z – |
преобразования, входящую как |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
сомножитель в формулу (6.64): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
F fg ( z ) |
|
(1 - r2 )s2f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
= |
|
|
a |
|
|
|
|
|
|
|
|
1 |
|
|
|
, |
|
|
|
|
a |
|
< |
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
< |
|
1 |
|
; |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|||||||||||||||||||||||||||||||||||||||||
|
|
F+g ( z ) |
|
|
|
|
sv |
|
|
|
|
|
(1 - r z )(1 - a z−1 ) |
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
F fg (z−1 ) |
|
(1- r2 )s2f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
a |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
= |
|
|
|
|
|
|
|
|
|
, |
|
r |
|
< |
|
z |
|
< |
|
|
|
|
|
. |
(6.68) |
|||||||||||||||||||||||||||||||||||||||||||||
|
F+g (z−1 ) |
|
|
sv |
|
|
|
|
|
(1- r z−1 )(1- a z ) |
|
|
a |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
Для отыскания реализуемой части разложим z-преобразование (6.68) на простые дроби (при этом коэффициент пока оставим в
156
стороне), а область сходимости будем указывать непосредственно под формулами:
|
|
1 |
|
|
= |
|
1 |
× |
|
1 |
|
× |
|
1 |
|
|
|
1 |
|
|
|
. |
|||||||||
(1 − ρ z |
−1 |
)(1 − α z ) |
|
1 − α ρ |
|
1 − ρ z−1 |
|
1 − α ρ |
1 |
− |
1 |
z |
−1 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
> |
|
ρ |
|
|
|
|
|
α |
|
|
|
|||||||||||
|
ρ |
< |
z |
< |
1 |
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
z |
<1 |
α |
|
|
||||||
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Реализуемой части соответствует первое слагаемое, то есть с учетом коэффициента в (6.68) имеем:
Φ fg (z−1 ) |
|
(1 − ρ2 )σ2f |
|
|
|
|
|
|
||||||
= |
α |
1 |
. |
(6.69) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|||||
Φ+g |
(z |
−1 ) |
|
|
σv (1 − α ρ) |
1 − ρ z−1 |
||||||||
|
ρ |
|||||||||||||
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
Передаточная функция всего восстанавливающего фильтра получается подстановкой (14.66) и (14.68) в (14.63):
|
|
|
|
|
|
|
|
|
|
1 − ρ z−1 |
|
Hвосст |
( z ) = |
|
|
|
α |
||||||
|
|
|
|
|
|
|
|
|
|||
|
ρ σv 1 − α z−1 |
||||||||||
|
|
|
|
|
|||||||
|
= |
|
|
|
|
C |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− α z−1 |
||||||||
|
1 |
||||||||||
(1 − ρ2 )σ2f |
|
1 |
|
|||||
α |
= |
|||||||
|
|
σ |
|
(1 − α ρ) |
|
|||
|
|
|
1 − ρ z−1 |
|||||
|
ρ |
v |
||||||
|
|
|
|
|
|
|
, (6.70) |
|
(1−ρ2 )α d 2
где на последнем шаге обозначено C = ρ(1−α ρ) , α – определяется
соотношением (6.66). Из (6.70) легко строится разностное уравнение, задающее рекуррентный алгоритм фильтрации сигнала:
|
(n) |
|
(n −1) + C g (n) . |
|
f |
= α f |
(6.71) |
||
Простая структурная схема ЛИС – системы, |
соответствующей |
|||
уравнению (6.71), показана на Рисунке 6.8.
Импульсная характеристика восстанавливающего БИХ-фильтра: hвосст (n) = C αn u (n) .
В соответствии с формулой (6.16) ошибка восстановления сигнала здесь равна:
157

ε 2 = σv2 hвосст (0) = σv2 C = |
σv2 (1 − ρ2 )α d 2 |
. |
|
||
|
ρ(1 − α ρ) |
|
Рисунок 6.8 - Структурная схема ЛИС – системы, реализующей рекуррентное восстановление сигнала
6.6 Восстановление сигнала КИХ-фильтром
Построим теперь субоптимальный восстанавливающий КИХ-
фильтр. В этом случае за оценку сигнала |
ˆ |
(n) принимается |
f |
взвешенная сумма конечного числа отсчетов наблюдаемого сигнала g (n) , то есть здесь оценка строится нерекурсивно, как результат непосредственного вычисления свертки
ˆ |
(n) = ∑hвосст (k ) g (n − k ) , |
(6.71) |
f |
k D
где D – конечное множество отсчетов, задающее “ окно” обработки. Выбрав область D вокруг восстанавливаемого отсчета
достаточно большого размера и рассчитав оптимальные коэффициенты КИХ-фильтра, можно получить среднеквадратичную погрешность восстановления, очень близкую к минимально достижимой, обеспечиваемой оптимальным физически нереализуемым линейным фильтром. Более того, даже при относительно небольших размерах окна обработки ошибка получается, как правило, меньше, чем у физически реализуемого восстанавливающего БИХ-фильтра. Это происходит благодаря тому, что в данном случае формируется “ двусторонняя” (интерполяционная) оценка, в которой учтены не только “ прошлые”, но и некоторое число “ будущих” отсчетов наблюдаемого сигнала.
158

Естественно, в этом случае восстановление реализуется с некоторой задержкой.
Задача синтеза субоптимального восстанавливающего КИХ- фильтра заключается в определении значений hвосст (n) в пределах
окна обработки, обеспечивающих минимум среднеквадратичной ошибки восстановления. Как и ранее, они определяются из системы уравнений (6.12). Отличие от предыдущих случаев состоит в том, что теперь область D содержит конечное число элементов – ND . Поэтому уравнение Винера-Хопфа (первая строка системы (6.12)) определяет систему из ND линейных алгебраических уравнений с таким же числом неизвестных – значений искомой импульсной характеристики. Методы решений таких систем хорошо известны.
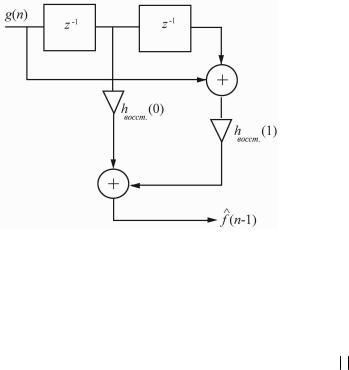
Пример 6.4. Построим простейший КИХ-фильтр вида (6.71) – процедуру восстановления сигнала по трем точкам:
1
( ) = ∑ ( ) ( − ) =
f n hвосст k g n k
k=−1
=hвосст (−1) g (n + 1) + hвосст (0) g (n) + hвосст (1) g (n −1)
для экспоненциально коррелированного сигнала, искаженного статически независимым белым шумом (для модели наблюдения (6.26)). Здесь D = { −1, 0, 1} . Из уравнения Винера-Хопфа получаем:
B |
(0) hвосст |
(−1) + B |
(−1) hвосст (0) + B |
g |
(−2) hвосст (1) = B |
fg |
(1) , |
|||||||
|
g |
|
|
|
g |
|
|
|
|
|
|
|
||
|
(1)hвосст |
(−1) + Bg (0)hвосст (0) + Bg |
(−1)hвосст (1) = B fg (0), |
|||||||||||
Bg |
||||||||||||||
|
|
(2)hвосст |
(−1) + Bg (1)hвосст (0) + Bg |
(0)hвосст (1) = B fg (−1). |
||||||||||
Bg |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В данном случае |
|
|
|
|
|
|
|
|
|
|
|||
|
|
B |
g |
(m) = B |
f |
(m) + B |
(m) = σ2 |
ρ |
|
m |
|
+ σ2 δ(m) , |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|||||||||
|
|
|
|
v |
f |
|
|
|
|
v |
|
|
||
B fg (−m) = B f (−m) = B f (m) = σ2f ρ m ,
поэтому записанная система уравнений конкретизируется:
159
(σ2f + σv2 )hвосст (−1) + σ2f |
ρ hвосст (0) + σ2f |
ρ2 hвосст (1) = σ2f |
ρ, |
|||||||||||||||||||||||
|
ρ hвосст (−1) + (σ2f + σv2 )hвосст (0) + σ2f |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
σ2f |
ρ hвосст (1) = σ2f |
, |
(6.72) |
|||||||||||||||||||||||
|
ρ2 hвосст (1) + σ2f ρ hвосст (0) + (σ2f + σv2 )hвосст |
(1) = σ2f |
|
|
||||||||||||||||||||||
σ2f |
ρ. |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Решение системы (6.72) имеет вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
1 + |
1 |
|
|
− ρ2 |
|
|
|
|
|
|
|
|
||||||||
|
hвосст (0) = |
|
|
|
|
d 2 |
|
|
|
, |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
1 + |
1 |
1 + |
1 |
|
+ ρ2 − 2ρ2 |
|
|
|
|
|
|||||||||||||||
|
d 2 |
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
d 2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
ρ |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
hвосст (−1) =hвосст (1) = |
|
|
|
|
|
|
|
|
|
|
d 2 |
|
|
|
|
|
|
, |
|
||||||
|
1 + |
1 |
|
1 + |
1 |
+ ρ2 |
− 2ρ2 |
|
||||||||||||||||||
|
d 2 |
d 2 |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
σ2 |
|
|
|||
где, как и раньше, использовано обозначение |
d 2 = |
|
|
f |
. |
|
|
|||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
σv2 |
|
|
|||
Полученный КИХ-фильтр может быть реализован с задержкой на один шаг в форме прямой свертки так, как показано на Рисунке
6.9.
Ошибка восстановления сигнала здесь опять определяется по формуле (6.16):
|
|
|
1 + |
1 |
|
− ρ2 |
|
|
|
||
ε 2 = σv2 hвосст (0) = σv2 |
|
|
d 2 |
|
|
. |
|||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|||||
|
1 + |
1 |
1 + |
1 |
|
+ ρ2 |
|
− 2ρ2 |
|||
|
|
|
|||||||||
|
d 2 |
d 2 |
|
|
|
|
|||||
Достоинство нерекурсивных процедур восстановления состоит в простоте их расчета. Для построения восстанавливающего КИХ- фильтра достаточно решить систему линейных уравнений, а не решать сложную задачу факторизации энергетических спектров. Кроме того, как уже отмечалось, КИХ-фильтр может обеспечить качество восстановления более близкое к оптимальному чем физически реализуемый винеровский фильтр.
160
Еще одно достоинство заключается в том, что данная методика расчета процедур восстановления легко обобщается на случай обработки двумерных сигналов.
Рисунок 6.9 - КИХ-фильтр, реализованный в форме прямой свертки с задержками
6.7 Практические задания к разделу 6
Квазиоптимальное восстановление сигналов (КИХ-фильтр)
6.7.1. Модель наблюдения:
y(m) = x(m) + v(m) ,
x(m) - полезный сигнал с корреляционной функцией Rx (n) = 0,8 n , v(m) - белый шум с единичной дисперсией, не зависящий от полезного сигнала.
Построить квазиоптимальный КИХ-фильтр для области наблюдения D = {−1;1} . Записать уравнение оценивания. Рассчитать среднеквадратичную погрешность.
6.7.2. Дана модель наблюдения:
|
y(n) = x(n) + x(n −1) + v(n) , |
||
где x(n) – |
полезный |
сигнал |
с корреляционной функцией |
Rx (m) = δ(m) , |
v(n) – |
помеха, |
белый шум с дисперсией 0,5, |
независимый от полезного сигнала.
161
Определить импульсную характеристику и построить структурную схему квазиоптимального КИХ-фильтра с областью
наблюдения |
D = { −1; 0} . Определить среднеквадратичную ошибку |
||||||
оценивания полезного сигнала. |
|
|
|||||
6.7.3. Дана модель наблюдения сигнала: |
|
||||||
|
y(n) = h(n) * x(n) + v(n) , |
|
|||||
где h(n) = αn−1u(n −1), |
|
α |
|
< 1 |
– импульсная |
характеристика |
|
|
|
||||||
искажающей системы, x(n) – |
полезный сигнал, белый шум с |
||||||
дисперсией |
Dx , v(n) – |
|
помеха, |
белый шум с |
дисперсией Dv , |
||
независимый от сигнала.
Построить квазиоптимальный восстанавливающий КИХ-фильтр с «окном» D = {−1; 0;1} . Определить среднеквадратичную ошибку оценивания полезного сигнала.
6.7.4. Модель наблюдения:
∞
y(m) = ∑2−k x(m − k) + v(m) . k =0
Полезный сигнал x(m) - некоррелированный с единичной дисперсией. Аддитивный шум v(m) – белый с дисперсией 3/5,
статистически независимый от полезного сигнала.
Построить квазиоптимальный КИХ-фильтр для восстановления сигнала x(m) . Область наблюдения D = {−1; 0;1} .
6.7.5. Дана модель наблюдения:
|
y(n) = x(n) + x(n −1) + v(n) , |
||
где x(n) – |
полезный |
сигнал |
с корреляционной функцией |
Rx (m) = δ(m) , |
v(n) – |
помеха, |
белый шум с дисперсией 0,5, |
независимый от полезного сигнала.
Определить импульсную характеристику и построить структурную схему квазиоптимального КИХ-фильтра с областью наблюдения D = {−1; 0} . Определить среднеквадратичную ошибку оценивания полезного сигнала.
162