

10806
.pdf- отсутствие единого комплекса признаков и факторов, используемого в карстологическом прогнозе, кроме того, зачастую не проводится его должное обоснование;
большинство прогнозных построений выполняется по результатам анализа поверхностных карстовых форм, которые, как правило, пространственно неадекватно отражают подземную закарстованность, что приводит к неоднозначным результатам, поскольку такие прогнозы строятся на том предположении, что процесс карстообразования будет идти аналогично предыдущим стадиям. Таким образом не учитывается эволюционный характер развития карстового массива, что может привезти к грубым ошибкам, что и подтверждают исследования [3], в ходе которых выявлено, что поля древних и молодых (образованных в течение последних 30 лет) карстовых воронок практически не коррелируют между собой;
для достоверности прогноза по большинству методик требуется длительный период наблюдения с данными определенного качества, включающими время образования карстопроявлений, их характер, морфометрию. Зачастую подобный мониторинг на закарстованных территориях не ведется и тем самым, получение качественной информации для расчетов становится невозможным;
оценки по конкретным карстовым формам носят вероятностностатистический характер, следовательно, результаты прогнозов, по мнению некоторых авторов относятся к группе неподтвержденных гипотез
[2, 4];
для повышения достоверности прогноза необходима достаточно большая площадь исследования. При этом укрупнении масштаба исследований результаты расчетов для одной и той же территории могут различаться.
Как показал опыт изучения карстообразования, наибольшую опасность представляют случаи внезапных слабо проявляющихся в начальный период явлений. В связи с этим, в настоящее время следует обратить внимание на развитие систем мониторинга состояния объектов , содержащих раздел, позволяющий предсказывать возможность внезапных проявлений карстовых провалов. Для этого, в частности, использовать радары, позволяющие отслеживать медленное развитие карстовых пустот на большой глубине. Это направление развития систем мониторинга в настоящее время разрабатывается на кафедре «Информационных систем и технологий» ННГАСУ.
Литература 1. СП 11-105-97. Инженерно-геологические изыскания для
строительства. Ч. II. Правила производства работ в районах развития
300
опасных геологических и инженерно-геологических процессов. М.:
ПНИИИС. 2001. 101 с.
2.Щербаков С.В. Интегральная оценка карстоопасности районов развития карбонатно-сульфатного карста на примере Среднего Предуралья: Дис. на соискание уч. степени к. г-м.н. – Екатеринбург, 2013, 273 с.
3.Bahtuarevich A. Sinkhole Density of the Forest City Quadrangle // Engineering and environmental impacts of sinkholes and karst. 3rd Multidisciplinary Conference on Sinkholes, St. Petersburg Beach, Florida, 2-4 October 1989. Rotterdam, Netherlands 1989. P. 75-82.
4.Gutierrez F. Guerrero J., Lucha P. Quantitive sinkhole hazard assessment. A case study from the Ebro Valley evaporate alluvial karst (NE Spain) // Natural Hazards, 2008. 45. P. 211-233.
А.Д. Чернышов, А.А. Кукинов, Д.А. Катышев, А.Н. Супрун
ФГБОУ ВО «Нижегородский государственный архитектурностроительный университет»
ПРОБЛЕМЫ ЭКСПЕРИМЕНТАЛЬНОГО ИЗУЧЕНИЯ ЭВОЛЮЦИИ ПОСЛЕДОВАТЕЛЬНОЙ ПОВЕРХНОСТИ ТЕКУЧЕСТИ МЕТАЛЛОВ
Поверхность текучести (ПТ) – граница, разделяющая упругую и неупругую зоны в пространстве напряжений, является одним из фундаментальных понятий многочисленных теорий пластичности металлов. Установлено, что процесс неупругого деформирования материалов ПТ перемещается и изменяет свою форму. Свойствам эволюции последовательной ПТ (ППТ) посвящены многочисленные экспериментальные и теоретические исследования. Однако почти вековой опыт изучения ППТ показал недопустимо большой разброс результатов, получаемых в экспериментах с достаточно близкими по химическому составу и физической структуре металлами. Это касается прежде всего геометрической формы ППТ.
Некоторый прогресс в стабилизации получаемых параметров ППТ стал наблюдаться в экспериментальных исследованиях, стремящихся к складывающемуся единообразию методики выполнения опытов: зондирование граничных точек начинать только после относительно длительного «отдыха» образца (около одного часа), первую точку определять в направлении нагружения, а вторую – в направлении разгрузки, определять граничные точки в каждом направлении однократно. Последователи этой методики, в основном, перестали
301
наблюдать некоторые существенные особенности геометрии ППТ – углы и вогнутости кривой, которые описывались в многочисленных публикациях (например, в [1-4]). Однако в экспериментах [5], выполненных по установившемся правилам, они опять появились. Этот диссонанс был объяснён в [6] более грубым (δ ≥10-4) в сравнении с общепринятым (δ≈10-5) допуском на пластическую деформацию.
Вработе [7] была показана ошибочность такого объяснения, а также было дано обоснование причины возникновения ложных углов и вогнутостей. Действительно, интенсивная ползучесть, проявляющаяся в
период «отдыха» образца, с некоторого момента времени t0 становится пренебрежимо малой для периода зондирования одной точки ППТ. Однако на интервале времени выполнения всего опыта такая ползучесть может оказывать заметное влияние на ПТ в виде движущейся и формоизменяющейся ППТ.
Меру такого влияния можно оценить с помощью компьютерного моделирования процесса, который протекает за время опытного построения ППТ. Однако в работе [5] никаких временных сведений об экспериментах не приводится. Это касается, прежде всего, данных в период интенсивной ползучести во время «отдыха» образца.
Всвязи с этим моделировался только период зондирования ППТ. При этом процесс ползучести описывался моделью реономной пластичности [8] с гиперэллиптической ПТ в Евклидовом пространстве девиаторов напряжений, а временные показатели пластичности определялись из условия минимальной величины суммы квадратичных отклонений теоретических точек от экспериментальных. Было условно
принято, что процесс начинался при t0=0, а моменты времени t1<t2<…<ti<…<t16, где i – номер точки, также определялись из того же условия. Величина t1 была принята за безразмерную единицу времени.
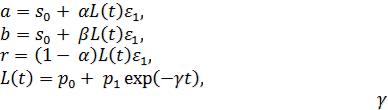
Параметры ППТ реономной пластичности (рис. 1) в пространстве
девиаторов напряжений после мгновенного пластического растяжения ε1 будут определяться при t ≥ t0 соотношениями (1) - (4)
1)
2)
где s0 – радиус сферической ПТ при t0=0; α, β, , p0, p1 – подлежащие
определению параметры модели.
3)
302

Рис. 1. Параметры ППТ в пространстве девиаторов напряжений
При α=0.264, β=0.778, γ=0.653, s0=199 Н/мм2, p0=821.6 Н/мм2, p1=1114.9 Н/мм2 и временными данными из табл. 1, опыт №1 была получена приближённая модель процесса построения ППТ в опытах [5]. Зондирование точек, также как и в [5], моделировалось веером лучей из
начала координат. На рис. 2 в координатах σ = σ1, τ =
σ1, τ = σ3 приведены
σ3 приведены
результаты, моделирующие возникновение ложного угла и вогнутости на ППТ.
При увеличении времени отдыха на 3 единицы (опыт 2 в табл. 1) вогнутость и острый угол исчезают (рис. 3). В компьютерном опыте 3 форма ПТ приближается к эллипсу (рис. 4).
Рис. 2. Результаты моделирования опытов [5], • - экспериментальные точки, ♦ - теоретические точки (опыт №1)
|
|
|
|
|
|
|
Таблица 1 |
|
№ опыта |
t1 |
t2 |
t3 |
… |
t14 |
t15 |
|
t16 |
1 |
1 |
1.1 |
2.1 |
… |
13.1 |
14.1 |
|
15.1 |
2 |
4 |
4.1 |
5.1 |
… |
16.1 |
17.1 |
|
18.1 |
3 |
6 |
6.1 |
7.1 |
… |
18.1 |
19.1 |
|
20.1 |
303
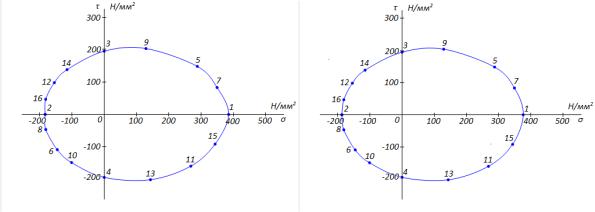
Рис. 3. ПТ в опыте №2 |
Рис. 4. ПТ в опыте №3 |
Выводы Численные эксперименты подтверждают указанное ранее [7]
объяснение причины возникновения ложных углов и вогнутостей на ППТ в [5] движением ПТ в период зондирования точек ППТ. Кроме того, становится очевидно, что для повышения достоверности в описании пластического деформирования материалов следует перейти к использованию математической модели реономной пластичности.
Литература
1.Naghdi P.M., Koff W. An experimental study of initial and subsequent yield surfaces in plasticity // J. Appl. Mech. 1958. V. 25. P. 201-209.
2.Phillips A., Gray G. A. Experimental investigation of corners in the yield surface // J. Basic Engin. 1961. V. 83. P. 275-289.
3.Hu L. W., Bratt J. F. Effect of tensile plastic deformation on yield condiction // J. Appl. Mech. 1958. V. 26. P. 411.
4.Свердлова Н. Г. Об изменении формы границы текучести в случае произвольного направления нагружения // Исследования по упругости и пластичности. Л.: Изд-во ЛГУ, 1968. Сб. 7. С. 144-147.
5.Gupta N. K., Layert H. A. A study of yield surface upon reversal of loading under biaxial stress // ZAMM. 1983. Bd. 63. H. 10. S. 497-504.
6.Findley W. N., Michno M. J. Concerning cups and vertices on the yield surface of annealed mild steel // ZAMM. 1987. Bd. 67. H. 7. S. 309-312.
7.Супрун А.Н. К проблеме существования конических точек и вогнутостей на поверхности текучести металлов // Изв. АН СССР. МТТ. №4 – М, 1991. – с. 180-185.
8.Супрун А.Н. Теория реономной пластичности: монография / А.Н. Супрун. – Н.Новгород: ННГАСУ, 2008. – 164 с.
304
В.А. Ковалев, А.С. Полтораднев
ФГАОУ ВО «Самарский национальный исследовательский университет имени академика С.П. Королева»
СОЗДАНИЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ПОЛЕТА РАКЕТЫ НА ОСНОВЕ ЭКСПЕРИМЕНТАЛЬНЫХ ДАННЫХ
Целью работы является создание такой математической системы, которая бы достаточно точно описывала движение ракеты, кроме того, она должна подтверждаться экспериментальными данными. Для этого были поставлены следующие задачи:
Разработать математическую модель полета ракеты, произвести ее расчет в математическом пакете Maple 17;
Спроектировать бортовую систему обеспечивающую траекторные измерения;
Получить и обработать экспериментальные данные с бортовой
системы;
На основе полученных данных внести изменения в исходную математическую модель.
Для того чтобы сделать успешный проект ракеты необходимо математически смоделировать движение ракеты, после проведения эксперимента важно оценить правильность теоретических расчетов.
Основным достоинством такого подхода является то, что после проведения нескольких экспериментов можно скорректировать параметры ракеты, учесть те факторы, которые трудно подсчитать теоретически, так, например, при расчете коэффициента лобового сопротивления не учитываются параметры поверхности.
Для того, чтобы составить уравнения движения рассмотрим плоское движение ракеты. Оговорим ряд допущений: зная, что максимальная высота подъема ракет, которые будут представлены далее, не превышает 1 км, рассматривать ускорение свободного падения, давление воздуха, плотность воздуха как функции от высоты не имеет смысла - примем их константами. Так как запуск происходит под углами близкими к 90, то также пренебрегаем подъемной силой.
Составим систему уравнений описывающую полет ракеты. Спроектировав все силы на касательную к траектории полета и нормаль, получим уравнения (1) и (2). Остальные уравнения необходимы для получения соответствующих зависимостей скорости от времени, высоты, горизонтального удаления, ускорения.
305
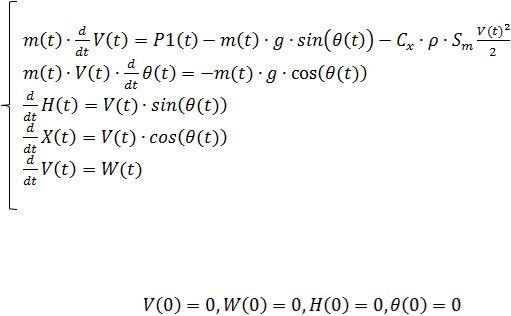
Система уравнений:
(1)
(2)
где,  – масса ракеты,
– масса ракеты,  – функция тяги двигателя,
– функция тяги двигателя,  – коэффициент аэродинамического сопротивления,
– коэффициент аэродинамического сопротивления,  – угол наклона траектории,
– угол наклона траектории,  – плотность воздуха,
– плотность воздуха,  – площадь миделевого сечения. Начальные условия для системы:
– площадь миделевого сечения. Начальные условия для системы:
Суть метода заключается в том, что на начальном этапе имеются некоторые входные данные (параметры ракеты). Масса ракеты и площадь миделевого сечения измеряются напрямую. Сх рассчитывается теоретически, тяга P1(t) берется из паспорта двигателя, поэтому за счет этих параметров можно аппроксимировать математическую модель к экспериментальным зависимостям.
Для получения экспериментальных данных разработана система, включающая в себя датчик высоты и GPS модуль, которая была интегрирована в электронную бортовую систему экспериментальных моделей ракет. В течении полета данные записывались и сохранялись на карту памяти, установленную в модели. Данные с GPS отправлялись по радиоканалу, полученные координаты использовались для поиска модели.
Вчисло регистрируемых параметров входят: время регистрации параметров после старта ракеты, значение высоты, с датчика высоты; с GPS модуля координаты и значения высоты.
Вкачестве главного микроконтроллера используется Arduino Nano.
Всистеме используется датчик высоты BMP280 и GPS модуль GPS NEO6M.
Описание BMP280:
Абсолютная точность измерения давления -  1 hPa;
1 hPa;
Относительная точность измерения давления – 0.12 hPa ( 1
1
m);
Частота опроса датчика – 10 Гц. Описание GPS модуля:
Максимальная точность определения положения -  2.5м;
2.5м;
Максимальная частота опроса датчика 1 Гц.
306
Рассмотрим метод на примере проекта СОДА1. СОДА1 – это легкая одноступенчатая модель ракеты, характеристики которой приведены в Таблице 1. На модель установлен двигатель РД-100, на Рис.1 представлен профиль тяги двигателя в соответствии с паспортом.
Таблица 1. Характеристики модели СОДА1.
Масса, |
Длина, мм |
Диаметр, |
Сх |
Средняя |
Удельный |
грамм |
|
мм |
|
тяга, Н |
импульс м/с |
1380 |
1050 |
80 |
0,35 |
67,5 |
785,7 |
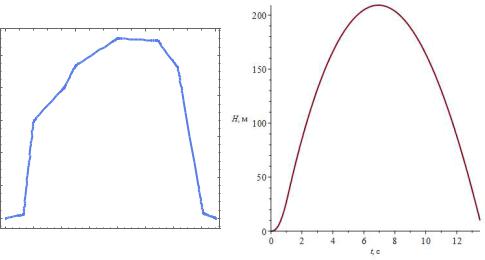
Исходя из Таблицы 1 и профиля тяги (Рис.1) была рассчитана зависимость высоты от времени (Рис.2), а также выведены зависимости скорости, ускорения, угла наклона траектории, горизонтального удаления. Характерными параметрами полета является высота апогея – 208м, максимальная скорость на участке 62,5 м/с (составляет 0,19 маха), максимальное ускорение 71,5 м2/с (перегрузка 7,2g).
|
100 |
|
|
|
|
|
|
|
|
80 |
|
|
|
|
|
|
|
H |
60 |
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
40 |
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0.0 |
0.2 |
0.4 |
0.6 |
0.8 |
1.0 |
1.2 |
1.4 |
t, c |
|
Рис.1. Профиль тяги СОДА1 |
Рис.2. Расчетная зависимость высоты от времени |
Следующим шагом было проведено сравнение показаний с датчика высоты, полученных в ходе запуска, и расчетной зависимости высоты от времени (Рис.3). Далее, методом наименьших квадратов была аппроксимирована расчетная зависимость высоты от времени к экспериментальным данным. Изменяя параметры Сх и среднюю тягу двигателя (Рис.4), добились минимального расстояния между функциями. После аппроксимации новый коэффициент аэродинамического сопротивления Сх=0,3 вместо 0,35, а средняя тяга 68,5 Н.
307
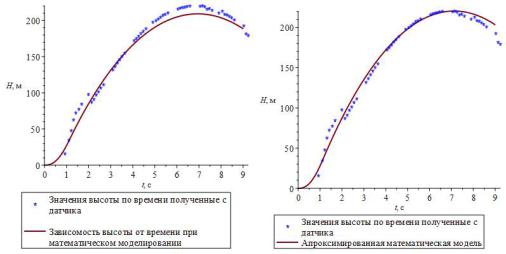
Рис.3. Экспериментальные данные |
Рис.4. Аппроксимация зависимости |
|
наложенные на расчетные для СОДА1 |
для СОДА1 |
|
Заключение. Таким образом была создана система, работающая в совокупности с математической моделью и экспериментальными данными. Данный метод нашел свое применение в 2 проектах, также он будет использоваться и совершенствоваться в следующем проектах.
Литература:
1.Маркеев А.П. – Теоретическая механика / издание второе, дополненное – 1999г
2.Васильев В.В., Морозов Л.В., Шахов В. Г. – Расчет аэродинамических характеристик летательных аппаратов – 1993г
3.Guided Tours [Электронный ресурс]. – Режим доступа: – spaceflightsystems.grc.nasa.gov/education/rocket/guided.htm
4.Устойчивость ракеты [Электронный ресурс]. – Режим доступа:
–kiasoft.narod.ru/interests/rockets/theory/stability/stability.htm
5.Дифференциальные уравнения движения баллистической ракеты [Электронный ресурс]. – Режим доступа: https://studopedia.su/11_94003_differentsialnie-uravneniya-dvizheniya- ballisticheskoy-raketi.html
308
А.А. Аксенова, М.С. Морозов, А.И. Ожиганов, В.А. Поваляева
ФГБОУ ВО «Нижегородский государственный архитектурностроительный университет»
СРАВНИТЕЛЬНЫЙ АНАЛИЗ ВЫБОРА СИСТЕМ КОНДИЦИОНИРОВАНИЯ ВОЗДУХА ПРОМЫШЛЕННЫХ ПРЕДПРИЯТИЙ
Первые попытки охлаждать воздух в помещениях появились в странах ближнего востока около тысячи лет назад. Устройства охлаждения воздуха использовали способность воды понижать температуру при испарении. Кондиционирование воздуха долгое время развивалось и претерпело сильные изменения, в связи с чем в настоящее время существует большое разнообразие различных конструктивных схем и исполнений.
Большинство современных систем кондиционирования воздуха используются в основном в гражданском домостроении, в производственных зданиях охлаждение воздуха применяется в меньшей степени в связи с высокими капитальными и энергетическими затратами, однако в определенных случаях оно необходимо. В настоящее время отсутствует единая методика выбора того или иного типа системы кондиционирования в производственных предприятиях различного назначения. Основным критерием выбора является в основном капитальная стоимость системы, что не всегда является энергоэффективным и оправданным решением.
Авторами рассмотрена современная классификация систем кондиционирования воздуха, оценка достоинств и недостатков отдельных схем и устройств, цель которой обзорно рассмотреть возможность применения того или иного решения в производственных зданиях различного назначения с точки зрения наибольшей энергоэффективности и наименьших эксплуатационных затратах.
Система кондиционирования типа «чиллер-фэнкойл» приведена на Рисунке 1. Чиллер – это холодильная машина, предназначенная для охлаждения жидкого теплоносителя (вода или незамерзающая жидкость). Охлажденная жидкость с помощью насосов подается в водо-воздушные теплообменники с вентиляторами, располагаемые в охлаждаемых помещениях, называемые фэнкойлы [1]. Фэнкойлы устанавливаются в помещениях под окном, на стене, под потолком, в потолке в зависимости от модификации и типа. Циркуляцию холодоносителя обеспечивает гидромодуль или насосная станция, включающая циркуляционные насосы, баки, запорную, регулирующую и предохранительную арматуру, устройства автоматического регулирования.
309