

9818
.pdf[Введите текст]
Лекция 4. Системы m уравнений с n неизвестными
4.1. Ранг матрицы. Мы рассматривали систему n уравнений с n неизвестными, у которой матрица невырожденная. А как быть, если матрица вырожденная ( ( A) = 0) или m ¹ n , то есть число неизвестных не совпадает с числом уравнений?
Для того чтобы ответить на этот вопрос, нам понадобится понятие ранга матрицы. Это некоторая числовая характеристика матрицы. Вводится она следующим образом. Выберем некоторые k строк и k столбцов и образуем матрицу порядка k , которая состоит из элементов, стоящих на их пересечении. Определитель этой матрицы будем называть минором k - го порядка.
Рангом матрицы A называется число r( A) , равное наибольшему из порядков её миноров, отличных от нуля. Если все миноры равны нулю, что возможно только для нулевой матрицы, то r = 0 .
Очевидно, что ранг — это число, удовлетворяющее неравенству
0 ≤ r ≤ min(m,n) ,
где m и n – размеры матрицы. Например,
|
1 |
2 |
|
, r ( A) = 2 ; |
|
1 |
1 |
1 |
|
|
r ( B) = 1, |
A = |
|
4 |
|
B = |
|
2 |
2 |
|
, |
||
3 |
|
|
2 |
|
|
|
|||||
так как все миноры второго порядка равны нулю.
Если матрица квадратная и невырожденная, то её ранг равен порядку матрицы.
Один из способов вычисления ранга – это «идти снизу», последовательно находя неравные нулю миноры первого, второго и следующих порядков.
4.2. Теорема Кронекера-Капелли. Выше при рассмотрении системы линейных уравнений мы ограничивались случаем, когда число уравнений совпадало с числом неизвестных и когда матрица системы была невырожденной. В этом случае система имеет единственное решение. Сейчас мы рассмотрим общий случай системы m уравнений с n неизвестными
30
[Введите текст]
a x + a x + L + a x = b |
||||
11 1 |
12 2 |
1n n |
1 |
|
a x + a x + L + a x = b |
||||
21 1 |
22 2 |
2n n |
2 |
|
LLLLLLLLLLLL |
||||
a x + a |
x + L + a x = b |
|||
m1 1 |
|
m2 2 |
mn n |
m |
или в матричной форме |
A × X = B . |
|
|
|
|
|
(4.1) |
||
%
Образуем так называемую «расширенную» матрицу B , полученную присоединением к матрице A столбца из свободных членов уравнений системы
|
|
|
a |
a |
K a |
b |
|
|
|
|
11 |
12 |
1n |
1 |
|
|
% |
= |
a21 |
a22 |
K a2n |
b2 |
|
|
B |
K K |
K K K . |
||||
|
|
|
|
am2 |
K amn |
|
|
|
|
|
am1 |
bm |
|||
Очевидно, что |
% |
|
|
|
|
|
|
rang A ≤ rang B . |
|
|
|
|
|
|
|
Вопрос о совместности системы решает теорема Кронекера-Капелли (Леопольд Крó некер (1823-1891г.г.) – немецкий математик и Альфредо Капелли (1855-1910 г.г.) – итальянский математик).
Теорема Кронекера-Кaпелли. Система линейных уравнений (4.1) совместна тогда и только тогда, когда
= % rang A rang B
(принимаем без доказательства).
Проиллюстрируем эту теорему в случае системы трех уравнений с тремя неизвестными
a x + b y + c z = d
1 1 1 1
a2 x + b2 y + c2 z = d2a3 x + b3 y + c3 z = d3
Рассмотрим расширенную матрицу
.
|
a |
b |
c |
% |
1 |
1 |
1 |
B = |
a2 |
b2 |
c2 |
|
a |
b |
c |
|
3 |
3 |
3 |
d1 d2 . d3
% |
и, следовательно, система совместна. |
Если det A ¹ 0 , то rang B = rang A = 3 |
Если det A = 0 и существует отличный от нуля определитель третьего по-
рядка, составленный из столбцов матрицы |
% |
% |
B , то rang B = 3, rang A < 3, и, |
||
31 |
|
|

[Введите текст] |
|
значит, система несовместна. И, наконец, если |
= x = y = z = 0 , то |
% |
и, следовательно, в соответствии с теоремой Кро- |
rang B < 3, rang A < 3 |
некера-Капелли система будет совместна тогда и только тогда, когда выполняется условие
|
|
|
% |
|
|
rang A = rang B . |
|
|
x + y + z = 6 |
|
|
Пример 1. |
2x - y + z = 3 |
D( A) = -5 ¹ 0 |
|
|
|
- y + 2z = 5 |
|
|
x |
|
|
|
|
rang A = 3, |
% |
|
|
rang B = 3 , |
|
так как ранг не может быть больше числа строк. Система совместна. Найдите её единственное решение.
|
5x − y + 2z = 7 |
|
|
5 |
-1 |
2 |
|
|
|
|
|||||
Пример 2. |
2x + y + 4z =1 |
D( A) = |
|
2 |
1 |
4 |
= 0 , |
|
|
|
|
1 |
3 |
-6 |
|
|
x - 3y - 6z = 0 |
|
|
|
(проверьте!), но есть минор второго порядка, отличный от нуля. Из расширенной матрицы образуем минор
5 |
-1 |
7 |
|
= -35 |
|
||||
2 |
1 |
1 |
|
|
1 |
-3 |
0 |
|
|
проверьте Значит % = и следовательно эта система несовместна
( !). , rang B 3 , , .
Из теоремы Кронекера-Капелли следует, что система n уравнений с n неизвестными с отличным от нуля определителем всегда совместна. Её единственное решение можно получить по правилу Крамера. В частности, однородная система уравнений, у которой все правые части равны нулю, а определитель не равен нулю, имеет единственное так называемое тривиальное решение.
Совместная система m уравнений с n неизвестными обладает единственным решением тогда и только тогда, когда ранг матрицы системы равен числу неизвестных. Поясним это на следующем примере.
x + y - z = 0 |
|
1 |
1 |
-1 |
|
|
|
|
|||||
2x - y + z = 3 |
|
|
||||
Минор |
2 |
-1 |
1 |
= 3 ¹ 0 , |
||
Пример 3. |
||||||
x - 3 y + 2z = 1 |
|
1 |
-3 |
2 |
|
|
2x - 5 y + 4z = 4 |
|
|
||||
|
|
|
|
|
||
|
|
|
|
|
|
|
|
32 |
|
|
|
|
[Введите текст]
поэтому rang A = 3. Вычислим минор четвёртого порядка расширенной
% |
|
|
|
|
|
|
матрицы B |
|
−1 |
|
|
||
|
|
1 |
1 |
0 |
|
|
|
|
|||||
|
|
2 |
−1 |
1 |
3 |
= |
|
|
1 |
−3 |
2 |
1 |
|
|
|
2 |
−5 |
4 |
4 |
|
(сложим третий столбец последовательно с первым, вторым столбцами)
|
|
|
0 |
|
0 |
−1 |
0 |
|
|
3 |
0 |
|
3 |
|
||
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|||||||||
|
|
|
3 0 1 |
3 |
|
|
|
|
||||||||
|
= |
|
= − |
3 −1 1 |
= |
|||||||||||
|
|
|
3 |
−1 |
2 |
1 |
|
|
6 |
−1 |
4 |
|
||||
|
|
|
6 |
−1 |
4 |
4 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||
(вычитая из первого столбца третий, получим) |
|
|
|
|
||||||||||||
|
|
|
|
0 |
0 |
3 |
|
|
|
2 |
−1 |
|
|
|
||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
= − |
2 |
−1 1 |
|
= −3 |
= 0 , |
||||||||||
|
|
|
|
2 |
−1 4 |
|
|
|
2 |
−1 |
|
|
|
|||
% |
|
|
|
|
|
|
|
|
|
|
|
|
||||
Система совместна и число неизвестных совпадает с |
||||||||||||||||
значит, rang B = 3. |
||||||||||||||||
рангом. Как найти ее решения? Нужно выписать те уравнения системы, которые дают отличный от нуля минор третьего порядка (так называемый базисный минор). В данном случае это три первых уравнения. Проверьте, что единственным решением системы этих уравнений будет (1, 2, 3) и оно удовлетворяет и оставшемуся уравнению. Это следует из того, что определитель расширенной матрицы равен нулю и, следовательно, элементы ее четвертой строки являются линейными комбинациями соответствующих элементов первых трех строк (см. свойство 9 определителей).
x − 2 y + z = 3 |
|
|
( A) = 0 , rang A = 2. |
Пример 4. x + 3y − z = 1 , |
|
3x + 4 y − z = 5 |
|
|
|
Из расширенной матрицы можно составить три минора третьего порядка (столбец свободных членов последовательно подставляется вместо коэффициентов при неизвестных). Убедитесь, что все они равны нулю. Зна-
% |
меньше числа неиз- |
чит, rang B = 2 . Система совместна, но ранг матрицы A |
вестных, поэтому система имеет бесчисленное множество решений. Как их найти? Выписываем уравнения, «дающие» базисный минор, оставляя в ле-
33
[Введите текст]
вой части число неизвестных, равное рангу матрицы (причём оставляем те неизвестные, которые «входят» в базисный минор)
x − 2 y = −z + 3 |
|
|
+ z |
x + 3y =1 |
|
Решаем эту систему, считая z произвольным параметром
x = |
1 |
× |
|
|
|
-z + 3 |
-2 |
|
= |
11 - z |
||||||||
|
|
|||||||||||||||||
5 |
|
1 |
+ z |
3 |
|
|
5 |
|
||||||||||
|
|
|
|
|
|
|
||||||||||||
y = |
1 |
× |
|
1 |
3 - z |
|
|
= |
2(z -1) |
|
||||||||
|
|
|||||||||||||||||
|
1 + z |
|
||||||||||||||||
|
5 |
|
|
|
1 |
|
|
|
|
|
|
5 |
|
|||||
Сформулируем теперь общее правило, по которому решается совместная система линейных уравнений. Пусть rang A= r .
·Отыскиваем базисный минор порядка r (он получается при нахождении ранга матрицы).
·Выбираем r уравнений, «породивших» базисный минор (остальные отбрасываем).
·Неизвестные, «входящие» в базисный минор, оставляем слева, а остальные (n - r ) называем свободными и переносим в правые
части уравнений.
·Решаем полученную систему r уравнений r с неизвестными. Из этого правила следует, что в случае, когда ранг совместной систе-
мы меньше, чем число неизвестных, то эта система имеет бесконечно много решений. В частности, однородная система n уравнений с n неизвестными и равным нулю определителем, т.е. когда
= % < rang A rang B n ,
кроме тривиального имеет ненулевые решения.
34

[Введите текст]
Раздел 2. Векторная алгебра
Лекция 5. Векторы и линейные операции над ними
5.1. Основные понятия и определения. Понятие вектора сформи-
ровалось в физике, точнее в механике. Скорость, ускорение, сила определяются величиной и направлением и называются векторными величинами. Масса, объем, температура и т.п. определяются численным значением и называются скалярами или скалярными величинами. Вектор – это на-
правленный отрезок. Обозначается вектор символом a или AB , где точка A – начало, а B – конец.
 B
B
A
Рис 5.1.
Длиной или модулем вектора называется расстояние между его на-
чалом и концом и обозначается | AB | или | a |.
Если начало и конец вектора совпадают, то он называется нулевым вектором 0 .
R |
|| b , если они параллельны |
Векторы называются коллинеарными a |
|
одной прямой. |
|
Векторы называются компланарными, если они параллельны одной плоскости (очевидно, что любые два вектора компланарны).
Два вектора |
a и b равны, если они коллинеарны , одинаково на- |
||||
правлены |
R |
−− b |
и их длины равны |
R |
|=| b |. Отсюда следует, что при пе- |
a |
| a |
||||
ремещении вектора параллельно самому себе получим равный ему вектор. Единичным вектором или ортом называется вектор, модуль кото-
рого равен единице (| a |= 1) .
5.2. Линейные операции над векторами. Произведением вектора
a |
|
R |
, который: |
на число k называется вектор b = k a |
|||
|
∙ |
R |
|
|
имеет длину | b |=| k | × | a | |
|
|
|
|
35 |
|
[Введите текст] |
|
|
|
|
||
∙ |
коллинеарен вектору |
a ( b |
|
R |
||
|
||||||
|
a ); |
|||||
∙ |
если |
k > 0 , то |
R |
; |
|
|
b −− a |
|
|
||||
∙ |
если |
k < 0 , то |
R |
; |
|
|
b −↓ a |
|
|
||||
∙ |
если |
k = 0 , то |
b = 0 . |
|
|
|
Рис 5.2
Свойства этой операции: |
1) |
k a = a k ; 2) k (la ) = (kl )a ; |
||
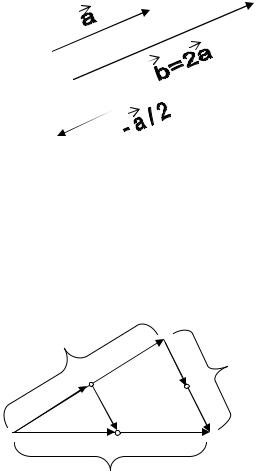
3) (k + l)a = ka + la ; 4) |
R |
R |
+ kb . |
Последнее свойство иллю- |
k (a + b) = ka |
||||
стрирует следующий рисунок, где |
k = 2 . |
|
|
|
2a
|
|
|
|
a |
b |
2b |
|
|
|
a |
|
b |
|
b |
|
|
|
|
R |
|
R |
+ b |
|
|
|
|
a + b |
|
a |
|
|
|
|
|
R |
+ b ) |
|
|
|
|
|
|
2(a |
|
|
||
|
|
|
|
Рис. 5.3 |
|
||
Вектор |
R |
R |
называется |
противоположным вектору a . |
|||
b = (−1) a |
= −a |
||||||
|
|
|
|
|
|
|
R |
По определению операции умножения вектора на число вектор b = k a |
|||||||
коллинеарен |
вектору |
a . Покажем, |
что имеет место обратное утвержде- |
||||
ние: если два вектора коллинеарны |
R |
|| b ), |
то существует такое число |
||||
( a |
|||||||
k ¹ 0 , что |
R |
|
|
|
|
|
b = k a , и это число с точностью до знака равно отношению |
||||||
длин этих векторов. Действительно, |
в случае, |
R |
возьмем |
|||
если a −− b , |
||||||
R |
|
|
k a направлены в одну сторону и их дли- |
|||
k =| b | / | a | . Тогда векторы b и |
|
|||||
|
R |
R |
−↓ b |
выберем |
R |
|
ны равны, т.е. b = k a . В случае |
a |
k = − | b | / | a | . |
|
|||
|
|
|
36 |
|
|
|
[Введите текст]
Суммой двух векторов a и b называется вектор |
R |
R |
получае- |
c |
= a + b , |
||
мый по одному из следующих правил. |
|
|
|
Правило треугольника: начало вектора b совмещается с концом |
|||
вектора a , тогда начало вектора c совпадает с началом вектора |
a , а ко- |
||
нец – с концом вектора b (рис 5.4). |
|
|
|
b |
|
b |
a |
R |
+ b |
|
|
a |
|
R |
|
|
|
|
b + a |
a b
a
Рис. 5.4
Из рисунка ясно, что порядок слагаемых может быть любой, т.е.
R |
R |
a |
+ b = b + a . |
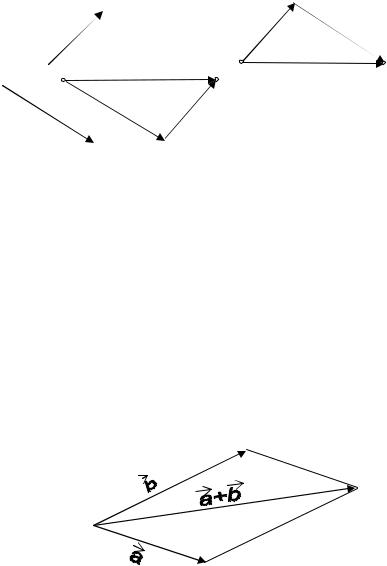
Отсюда следует правило параллелограмма: на векторах a и b , имеющих общее начало, строится параллелограмм, тогда начало вектора c совпадает с общим началом векторов a и b , а конец – с противоположной вершиной параллелограмма (рис. 5.5).
Рис. 5.5
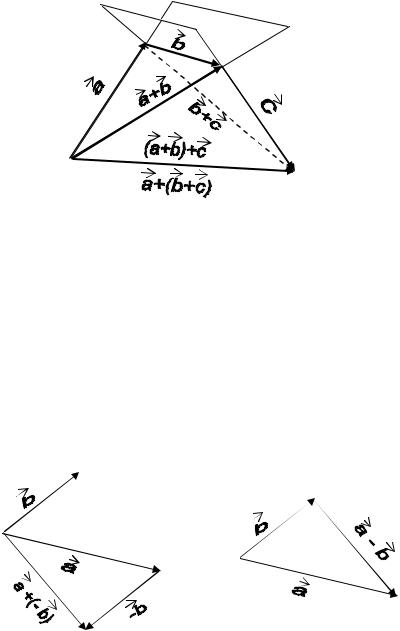
Для суммы справедлив сочетательный закон |
R |
R |
R |
R |
(a |
+ b) + c |
= a |
+ (b + c ) . |
Заметим, что векторы не обязаны быть расположенными в одной плоскости (см. рис. 5.6).
37
[Введите текст]
Рис. 5.6
Отметим также операцию сложения с нуль-вектором
R |
R |
R |
a |
+ 0 = 0 + a |
= a |
Разность векторов a и b определяется через введенные выше операции следующим образом
R − = R + − a b a ( b)
Рис. 5.7
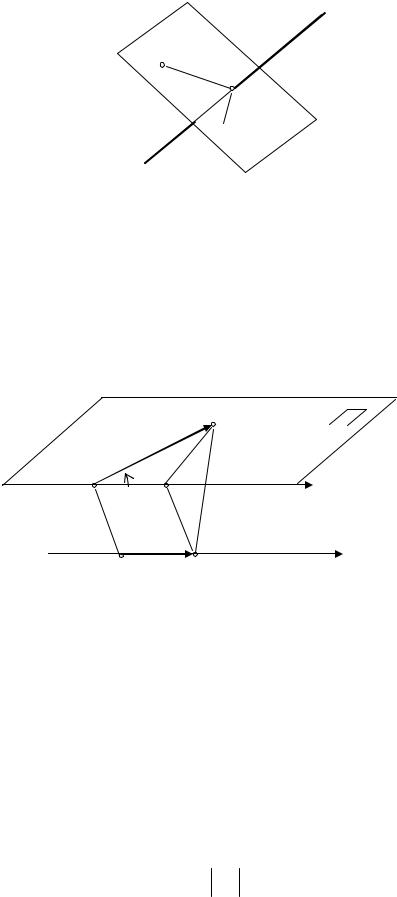
5.3. Проекция вектора на ось. Напомним, что проекцией точки M
на ось L в пространстве называется точка M1 пересечения оси L и плоскости, проходящей через точку M перпендикулярно этой оси (рис. 5.8).
38
[Введите текст]
L
M
M 1
Рис. 5.8
Проекцией вектора AB на ось L называется число ПрL AB , равное по модулю расстоянию между проекциями начала и конца вектора AB на
ось L , и взятого со знаком плюс, если направление вектора A′B′ совпадает с направлением оси, и со знаком минус, если они направлены в противоположные стороны.
|
|
|
B |
A |
ϕ |
|
L′ |
|
|
|
|
|
|
|
L |
|
′ |
B |
′ |
|
A |
|
|
|
|
|
Рис. 5.9 |
Из рисунка ясно, что ось |
L и вектор AB можно считать располо- |
||
женными в одной плоскости |
П. |
Далее будем считать её совпадающей с |
|
плоскостью чертежа. Под углом |
ϕ между осью L и вектором AB бу- |
||
дем понимать меньший из углов, который отсчитывается от направления оси до направления вектора. При этом луч, совмещающий направление оси с направлением вектора поворачивается на угол 0 ≤ ϕ ≤ 1800 .
Теорема. Пусть вектор AB составляет с направлением оси L угол ϕ
. Тогда верна формула
ПрL AB = AB cos ϕ .
39