

9372
.pdf91
Одновременно с дозированием каждый датчик влажности определяет влажность каждого компонента и передаѐт данные в центральный контрол-
лер системы. Так же в центральный контроллер передаются данные о коли-
чествах дозируемых компонентов из локального контроллера заполнителей.
Таким образом центральный контроллер рассчитывает количество воды,
приносимой каждым компонентом и корректирует рецепт дозатору воды и химдобавок.
Дозирующие бункеры смонтированы на единой раме устанавливаемой на пол дозировочного отделения.
Дозирование воды и химдобавок
-Выход материала в дозатор D = 150 мм.
-Диаметре ѐмкости Д=500 мм.
-Точность дозирования воды +/-1 кг, хим. добавок +/-0,2 кг.
-Время дозирования в пределах 20-25 сек.
Дозатор воды обеспечивает при наибольшем пределе дозирования НПД = 300 кг.
Дозирование воды должно осуществляться в зависимости от влажности за-
полнителей. Дозирование воды и химдобавок в одну ѐмкость осложнено
«раскачиванием» массы воды в ѐмкости.
Для исключения колебания показаний веса воды предлагается способ изме-
рения веса методом определения давления жидкости в ѐмкости, имеющей равные площади сечений по по высоте (цилиндр, куб, и т. п.).

92
Для дозирования воды желательное применение клапанов типа «баттер-
фляй».Для дозирования химдобавок – шаровых кранов из нержавеющей ста-
ли с поворотным приводом.
Ёмкость дозатора может быть оснащена 1-2 клапанами выпуска Д=150 мм.
Для работы с 1-2 бетоносмесителями.
Дозирующая ѐмкость ставится на подставку на пол дозирующего отделения.
Ёмкость может быть выполнена из химически стойких пластмасс. Подвод химдобавок выполняется металло пластиковыми трубами.
Выводы В результате сравнения вариантов автоматического дозирования
компонентов бетонной смеси достигаются следующие одинаковые положительные эффекты:
–обеспечивается безопасное ведение работ;
–сокращается количество обслуживающего персонала;
–экономятся сырьевые материалы и энергоресурсы;
–повышается производительность;
–улучшается качество бетонной смеси за счет обеспечения требуемой точности дозирования компонентов;
–обеспечиваются комфортные условия труда.
Зарубежный вариант автоматизации БСУ дороже в (3…4) раза отечественного, требует высокой подготовки заполнителей. Полученная бетонная смесь требуемого качества.
Отечественный вариант автоматизации БСУ дешевле, оборудование адаптировано к нашим условиям функционирования. Отечественные производители бетона тратят цемента на (5…7) % больше, чем зарубежные производители при одном и том же качестве продукции.
Любая автоматизация производства, связанная с переходом на тензометрические системы взвешивания уже приводит к повышению надѐжности оборудования, точности дозирования и, соответственно,
93
повышает качество приготовления бетона, однако, для этого нужно иметь соответствующие средства и быть уверенным в окупаемости данного оборудования в разумные сроки.
3.3 Автоматизация ямной пропарочной камеры
В данном примере рассмотрены вопросы автоматизации ямной пропа-
рочной камеры и всего комплекса камер.
Теплоносителем в ямной камере является насыщенный водяной пар.
Расчетное количество камер — 23 (пример).
Технологическая схема автоматизации ямной пропарочной камеры
Программное регулирование заложено в микро-ЭВМ и составлено на основании индивидуального графика тепловой обработке изделия.
В качестве датчиков температуры используется термопреобразователь сопротивления типа ТСМ, установленный внутри камеры.
Для формирования сигнала управления применяется регулятор со встро-
енным таймером и поддержкой выполнения программ технолога ТРМ251 –
программный ПИД-регулятор. Режим работы этого прибора формируется программным образом микро-ЭВМ. Сигнал управления от регулирующего прибора ТРМ251 подается на блок управления NS каждой камеры. С помо-
щью этого блока осуществляется управление используемого механизма регу-
лирующего клапана на магистрали подачи пара.
В результате взаимодействия всех устройств системы управления осуще-
ствляется программное регулирование температуры по расчетному графику.
Прибор позволяет проводить тепловлажностную обработку в автоматиче-
ском режиме по современному эффективному алгоритму, а также осуществ-
лять программное пошаговое ПИД-регулирование– 3 программы технолога по 5 шагов.

94
Рисунок 3.12 – Поддержание установленных параметров среды в авто-
матическом режиме
Рисунок 3.13 - Регулирование по программе, заданной технологом
Функциональная схема системы управления
ТРМ251 может работать в сети только при наличии в ней мастера. Мас-
тером сети RS-485 может быть персональный компьютер, программируемый контроллер, например ОВЕН ПЛК, панель оператора ОВЕН ИП320 и др. В
конкретном случае применяется персональный компьютер.
Функциональная схема прибора показана на рисунке 3.14.

95
Рисунок 3.14Функциональная схема прибора
Наличие в системе управления аналого-цифрового и цифро-аналогого преобразователей (АЦП и ЦАП) является принципиальной необходимостью в случае применения УВТ, поскольку микро-ЭВМ работает в цифровом коде.
В узле АЦП аналоговый (непрерывный) сигнал датчиков и других входных устройств преобразуется в дискретную форму (в цифровой код), а в ЦАП – из дискретной в аналоговую.
Микропроцессор выполняет все арифметические и логические операции,
формирует команды управления.
Порт ввода и порт вывода микро-ЭВМ – это специальные схемные структуры, к которым через АЦП и ЦАП подключаются внешние устройств.

96
Рисунок 3.15 – Общая схема подключения ТРМ251
Взаимодействие процессора с ОЗУ, ПЗУ и объектом управления проис-
ходит через шину адреса, шину данных и шину управления. Здесь термин
«шина» обозначает магистраль, через которую поступает поток данных. Фи-
зически же шина выполнена из нескольких параллельных проводников.
Весь комплекс правил и технических средств микро-ЭВМ, регламенти-
рующих и обеспечивающих обмен информацией между процессором, ОЗУ,
ПЗУ и объектом управления называют интерфейсом. Составной частью ин-
терфейса являются шины адреса, данных и управления.
Система управления с применением микро-ЭВМ работает следующим образом. Аналоговые датчики вырабатывают сигналы, пропорциональные регулируемым величинам. Аналоговый сигнал датчиков преобразуется в АЦП в дискретную форму. Микро-ЭВМ принимает информацию от АЦП в
97
дискретной (цифровой) форме и в соответствии с залаженной программой определяет степень еѐ соответствия заданию.
При отклонении регулируемой величины температуры от заданного зна-
чения на входе микро-ЭВМ появляется сигнал в дискретной форме, посту-
пающий на ЦАП. В узле ЦАП сигнал из дискретной формы преобразуется в непрерывную форму. Такое преобразование необходимо ввиду того, что ис-
полнительные механизмы работают под воздействием аналоговых сигналов.
Исполнительные механизмы воздействуют на соответствующие регулирую-
щие органы, которые изменяют параметры объекта в требуемом направле-
нии.
Хотя системы управления с применением микро-ЭВМ часто функцио-
нально и по структуре сложнее по сравнению с системами, выполненными на транзисторах и логических элементах, но они дешевле благодаря достижени-
ям современной микроэлектроники.
Регулирование температуры в ямной камере
Принцип управлению по отклонению применяется в системах автомати-
ческого управления, в которых управляющее воздействие формируется в не-
посредственной зависимости от управляемой величины.
Частным случаем такой системы является система автоматического ре-
гулирования, предназначенная для автоматического поддержания заданных значений какой либо физической величины в заранее установленных преде-
лах.
Работу необходимо производить в следующей последовательности:
измерить температуру, подлежащую регулированию, сравнить измеренное значение заданное и воздействовать на камеру таким образом, чтобы раз-
ность между измеренным и заданным значениями была бы возможно мень-
ше.
98
Все эти функции выполняет регулятор. Регулятор это устройство, обес-
печивающее заданный режим работы камеры.
Камера – агрегат, в котором протекает процесс регулирования. Физиче-
скую величину, которую необходимо регулировать называют регулируемой.
Камера и регулятор составляют систему автоматического регулирования.
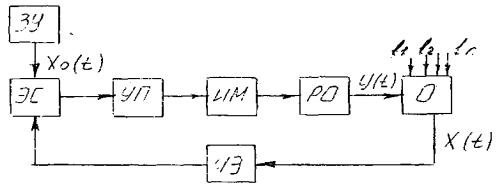
Рисунок 3.16. - Функциональная схема автоматического регулиро-
вания температуры в ямной камере по отклонению.
На объект регулирования (рисунок 3.16) поступают возмущающие воздействия f1, f2… fп – все внешние факторы, приводящие к отклонению температуры состояние объекта характеризуется выходной величиной.
Температура воспринимается чувствительным элементом ЧЭ и поступает на элемент сравнения ЭС, сюда же поступает сигнал задающего устройства.
Разность этих сигналов через усилитель-преобразователь УП воздействует на исполнительный механизм ИМ, откуда в виде регулирующего воздействия с помощью регулирующего органа – на камеру. Из рисунка видно, что замк-
нутая система автоматического регулирования имеет обратную связь между выходом объекта регулирования и входом регулятора. Эту связь называют главной, она всегда отрицательна, поскольку еѐ сигнал ослабляет действие основного входного сигнала и влияние возмущающих воздействий. Рассмот-
ренный выше принцип управления основан на использовании отклонения ре-
гулируемой величины от заданной.
99
Часто в регулятор для улучшения процесса регулирования вводят дополнительные обратные связи, которые создают дополнительные замкну-
тые контуры регулятора. Датчик системы автоматического регулирования воспринимает текущие значения температуры и преобразует еѐ в величину,
удобную для передачи и усиления. К первичным преобразователям относят-
ся, например, различные датчики уровня, положения, температуры. Элемент сравнения предназначен для сравнения текущего значения температуры с за-
данным и выработки сигнала ошибки.
Усилитель усиливает и преобразует сигнал ошибки. В системах автома-
тического регулирования применяют различные усилители: гидравлические,
пневматические, электрические.
Исполнительный механизм приводит в движение регулирующий орган,
который в свою очередь воздействует на объект регулирования таким обра-
зом, чтобы уменьшить отклонения температуры. В устройствах автоматики регулирующий орган чаще всего составляет единое целое с исполнительным механизмом.
При наличии усилительно-преобразовательного звена, использующего энергию извне, регулятор называют регулятором непрямого действия.
В некоторых регуляторах усилитель-преобразователь может отсутство-
вать. Такие регуляторы называют регуляторами прямого действия.
По виду внешней используемой энергии регуляторы могут электриче-
скими, гидравлическими и пневматическими.
Блок регулирующий программный
Для автоматизации тепловлажностной обработки изделия в паровоз-
душной среде (пропарочная ямная камера) используется программный регу-
лятор температуры ОВЕН ТРМ251.
100
Программный полупроводниковый регулирующий приборТРМ251
предназначен для регулирования температуры по заданной программе в та-
ких тепловых объектах как пропарочная камера, кассета и т.д.
Входы ТРМ251 – универсальные, к ним подключаются все наиболее распространенные типы датчиков:
термопреобразователи сопротивления типа ТСМ/ТСП/ТСН;
термопары TХК(L), ТХА(К), ТЖК(J), ТНН(N), ТПП(R), ТПП(S),
ТПР(В), TВР(А_1,2,3), ТМК(Т);
датчики с унифицированным выходным сигналом тока 0(4)...20 мА, 0...5 мА или напряжения 0...1 В, –50...+50 мВ.
|
Технические характеристики: |
1 |
Напряжение питания - 90...245 В переменного тока. |
2 |
Частота напряжения питания - 47...63 Гц. |
3 |
Потребляемая мощность - не более 6 ВА. |
4 |
Количество универсальных входов - 2 (основной и резервный). |
5 |
Минимальное время опроса датчика - 0,3 с. |
6 |
Количество выходных элементов - 3. |
7 |
Тип интерфейса связи - RS-485. |
8 |
Габаритные размеры (мм) и степень защиты корпуса: |
–настенный Н - 130х105х65, IP44;
–щитовой Щ1 - 96x96x70, IP54 со cтороны передней панели. 9 Масса прибора - не более 0,5 кг.
Характеристики измерительных датчиков
1 |
Тип датчика - ТСМ 50М/100М (W100=1,426). |
|
2 |
Диапазон измерений -–50…+200 °С. |
|
3 |
Разрешающая способность - |
0,1 °С. |