

§4. Градиентный метод нелинейного программирования.
Пусть мы имеем
некоторую функцию
 двух действительных переменных и
некоторую точкуA
двух действительных переменных и
некоторую точкуA ,
принадлежащую области определенияXэтой функции. Назовем градиентом функцииfвектор
,
принадлежащую области определенияXэтой функции. Назовем градиентом функцииfвектор (символ
(символ читается: «набла»
читается: «набла» ).
).
Градиент
 в точке А перпендикулярен касательной
к линии уровня функции
в точке А перпендикулярен касательной
к линии уровня функции
 в этой точке.
Например дана функция
в этой точке.
Например дана функция
 .
Построим несколько ее линий уровня
(рис. 55):
.
Построим несколько ее линий уровня
(рис. 55):

Известно, что
направление градиента
 служит направлением максимальной
скорости роста функции. На примере
задачи с двумя переменными покажем
геометрическую картину градиентного
метода.
служит направлением максимальной
скорости роста функции. На примере
задачи с двумя переменными покажем
геометрическую картину градиентного
метода.

Рис 55.
Задача 7.6.1.
Найти глобальный максимум
 на множестве решений системы неравенств.
на множестве решений системы неравенств.

Предположим, что
мы начинали с некоторого допустимого
решения, определённого координатами
точки
 .
Градиент
.
Градиент или
или является вектором, перпендикулярным
касательной к линии уровня в точке
является вектором, перпендикулярным
касательной к линии уровня в точке .
Мы двигаемся из точки
.
Мы двигаемся из точки в направлении
в направлении до тех пор, пока не достигнем границы
множества допустимых решений
до тех пор, пока не достигнем границы
множества допустимых решений .
Дальше мы не можем двигаться в направлении
.
Дальше мы не можем двигаться в направлении ,
так как при этом мы выйдем из множества
допустимых решений. Поэтому мы выбираем
вектор
,
так как при этом мы выйдем из множества
допустимых решений. Поэтому мы выбираем
вектор ,
составляющий с вектором
,
составляющий с вектором наименьший
угол по сравнению с любым другим вектором
с началом в точке
наименьший
угол по сравнению с любым другим вектором
с началом в точке и лежащим в множестве допустимых решений.
Таким образом, на следующем шаге мы
двигаемся вдоль прямой
и лежащим в множестве допустимых решений.
Таким образом, на следующем шаге мы
двигаемся вдоль прямой Это приводит нас в точку
Это приводит нас в точку На этом процесс заканчивается.
Геометрически это выражается тем, что
На этом процесс заканчивается.
Геометрически это выражается тем, что составляет
тупой угол с любым вектором в множестве
допустимых решений, выходящим из точки
А.Заметим что в точке
составляет
тупой угол с любым вектором в множестве
допустимых решений, выходящим из точки
А.Заметим что в точке
 функция достигает глобального максимума:
функция достигает глобального максимума: Предположим
теперь, что, решая эту же задачу, в
качестве начального допустимого решения
мы выберем точку
Предположим
теперь, что, решая эту же задачу, в
качестве начального допустимого решения
мы выберем точку (рис. 56). В этом случае мы сначала по
направлению
(рис. 56). В этом случае мы сначала по
направлению достигаем точки
достигаем точки ,
а затем по направлению
,
а затем по направлению вдоль прямой
вдоль прямой попадаем в точку
попадаем в точку .
На этом процесс заканчивается:
.
На этом процесс заканчивается: В точке
В точке функция достигает лишь локального
максимума. Даже на одном примере видно,
что результат решения зависит от того,
с какой точки допустимого решения
начинается процесс.
функция достигает лишь локального
максимума. Даже на одном примере видно,
что результат решения зависит от того,
с какой точки допустимого решения
начинается процесс.
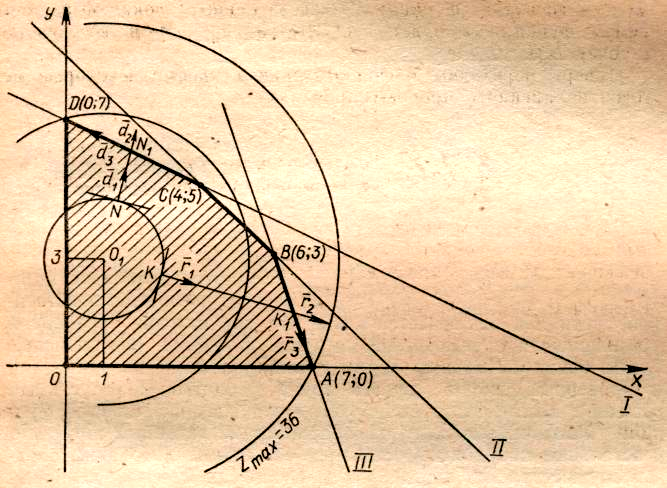
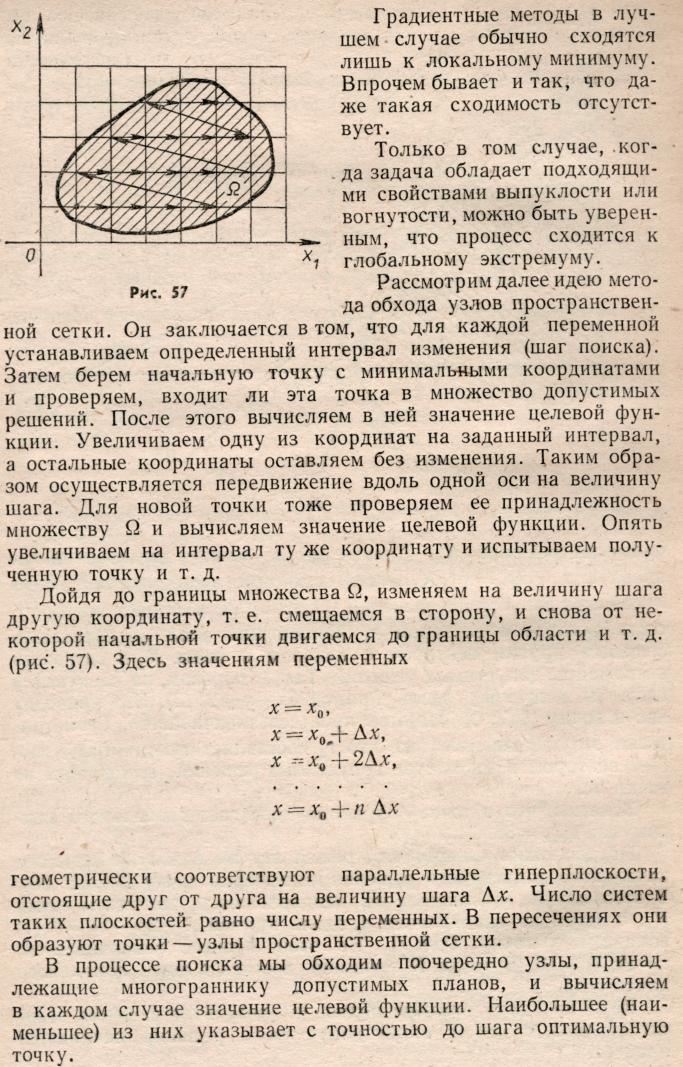
Рис. 56.
Градиентные методы в лучшем случае обычно сходятся лишь к локальному минимуму. Впрочем бывает и так, что даже такая сходимость отсутствует.
Только в том случае, когда задача обладает подходящими свойствами выпуклости или вогнутости, можно быть уверенным, что процесс сходиться к глобальному экстремуму.
Рассмотрим далее идею метода обхода узлов пространственной сетки. Он заключается в том, что для каждой переменной устанавливается определенный интервал изменения (шаг поиска). Затем берем начальную точку с минимальными координатами и проверяем, входит ли эта точка в множество допустимых решений. После этого вычисляем в ней значение целевой функции. Увеличиваем одну из координат на заданный интервал, а остальные координаты оставляем без изменения. Таким образом осуществляется передвижение вдоль одной оси на величину шага. Для новой точки тоже проверяем ее принадлежность множеству Ω и вычисляем значение целевой функции. Опять увеличиваем на интервал ту же координату и испытываем полученную точку и т.д. Дойдя до границы множества Ω, изменяем на величину шага другую координату, т. е. смещаемся в сторону, и снова от некоторой начальной точки двигаемся до границы области и т.д. (рис. 57). Здесь значениям переменных





геометрически
соответствуют параллельные гиперплоскости,
отстоящие друг от друга на величину
шага
 .
Число систем таких плоскостей равно
числу переменных. В пересечениях они
образуют точки - узлы пространственной
сетки. В процессе поиска мы обходим
поочередно узлы, принадлежащие
многограннику допустимых планов, и
вычисляем в каждом случае значение
целевой функции. Наибольшее (наименьшее)
из них указывает с точностью до шага
оптимальную точку.Этот
метод, как нетрудно было уже заметить,
связан с огромным объемом вычислительной
работы. Он пригоден для решения задач
с малым числом переменных и с обязательным
применением электронных вычислительных
машин.
.
Число систем таких плоскостей равно
числу переменных. В пересечениях они
образуют точки - узлы пространственной
сетки. В процессе поиска мы обходим
поочередно узлы, принадлежащие
многограннику допустимых планов, и
вычисляем в каждом случае значение
целевой функции. Наибольшее (наименьшее)
из них указывает с точностью до шага
оптимальную точку.Этот
метод, как нетрудно было уже заметить,
связан с огромным объемом вычислительной
работы. Он пригоден для решения задач
с малым числом переменных и с обязательным
применением электронных вычислительных
машин.