

Рабочие станции
Если диапазон применений персональных компьютеров (ПК) довольно широк — от домашних компьютеров до профессиональных приложений в бизнесе и технике, то рабочие станции с самого начала их появления использовались в автоматизированных системах проектирования для решения сложных инженерных задач. Поэтому к ним предъявлялись требования повышенных производительности, надежности, емкости памяти, достижение которых происходило за счет роста цены.
Различают рабочие станции высокой, средней и низкой производительности.
От персональных компьютеров рабочие станции отличают следующие особенности:
в рабочих станциях высокой производительности характерно использование многопроцессорных структур;
высокая производительность достигается также преимущественным применением процессоров RISC архитектуры;
достижению высокой надежности способствует использование версий операционной системы UNIX;
проблемная ориентация на приложения САПР обеспечивается развитыми графическими средствами для интерактивной работы пользователей.
Большинство рабочих станций ориентировано на применение в САПР машиностроения, в которых велика доля графических операций. Для их эффективного выполнения обычно используют специализированные графические процессоры с аппаратной реализацией части графических операций.
Примерами рабочих станций могут служить системы компании IBM на двухъядерных процессорах:
IntelliStation A Pro — AMD® Opteron;
IntelliStation M Pro — Intel Pentium® 4;
IntelliStation Z Pro — 2 процессора Intel® Xeon. Корпус — Mini Tower.
Графическая
система построена на графических картах
3Dlabs® Wildcat![]() Realizm®
800, ATI® FireGL
Realizm®
800, ATI® FireGL![]() V7100,
NVIDIA® Quadro FX 4500 и др.
V7100,
NVIDIA® Quadro FX 4500 и др.
Пример рабочей станции для САПР: IBM BladeCenter HC10, 2.66 GHz, 8 GB, графические карты NVIDIA Quadro FX 1600M, операционные системы XP, XP64 Vista, Vista64.
Компания Fujitsu Siemens Computers выводит на рынок рабочую станцию начального уровня Celsius W370. В ней реализован ряд передовых технических инноваций, таких как модернизированная более быстрая платформа на базе четырехъядерных процессоров Intel Core2 Quad или двухъядерных процессоров Intel Core2 Duo, графический адаптер вплоть до nVidia Quadro FX 1700, а также привод Blu-ray Disc. Celsius W370 обеспечивает стабильную работу в режиме 24/7, при этом уровень шума составляет всего 18 дБ, что делает ее одной из самых тихих рабочих станций в своем классе.
Архитектуры серверов и суперкомпьютеров
Серверы и суперкомпьютеры, как правило, являются векторными или многопроцессорными вычислительными системами. По классификации вычислительных систем, предложенной Флинном, это системы типов SIMD или MIMD.
Компьютеры типа SIMD подразделяются на классы SM-SIMD и DM-SIMD.Типичный SM-SIMD компьютер — это векторный компьютер, включающий в свой состав скалярный процессор целочисленной арифметики, функциональные блоки для операций сложения и умножения чисел с плавающей точкой, векторный процессор и общую память. Векторный процессор имеет конвейерную архитектуру — состоит из нескольких функциональных блоков. Примеры векторных компьютеров — NEC SX-8B, CDC Cyber 205, ETA-10.
|
|

Рис. 1. Архитектура SM-SIMD компьютера
Многопроцессорная вычислительная система состоит из одного или более узлов. В свою очередь, узел определяется как вычислительная система, работающая под управлением одной операционной системы и состоящая из одного или нескольких процессоров, оперативной памяти и системы ввода-вывода.
Многопроцессорные системы класса DM-SIMD называют также матричными (processor-array machines). Процессоры в этих компьютерах образуют некоторую 2D или 3D сеточную структуру. Один из процессоров (control processor) выполняет управляющие функции. Поскольку все процессоры одновременно должны выполнять одну и ту же операцию, не любой вычислительный процесс может быть эффективно реализован на компьютере этого класса. Поэтому системы DM-SIMD, как правило, являются специализированными, примерами могут быть сигнальные процессоры, компьютеры для статистических расчетов по методу Монте-Карло и т.п.
|
|

Рис. 2. Архитектура DM-SIMD компьютера
Компьютеры типа MIMD параллельно выполняют несколько потоков команд над несколькими потоками данных. К классу компьютеров SM-MIMD, называемых мультипроцессорами, относятся многопроцессорные векторные компьютеры PVP (Parallel Vector Processing) и симметричные многопроцессорные системы SMP (Symmetric multiproccssor).
Для PVP-систем характерно наличие специальных векторно-конвейерных процессоров, в которых предусмотрены команды однотипной обработки векторов независимых данных, эффективно выполняющиеся на конвейерных функциональных устройствах.
В SMP-системах один узел содержит два или более одинаковых процессоров, разделяющих одно и то же адресное пространство и имеющих равноправный доступ к другим ресурсам узла. Так как с увеличением числа процессоров существенно возрастают сложности обеспечения их связи между собой и с общей памятью, архитектура SMP имеет ограничения по числу используемых процессоров — узел обычно включает не более 32 процессоров.
|
|
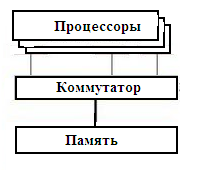
Рис. 3. Узел SMP
В системах SMP-архитектуры одни и те же данные могут разделяться несколькими процессорами, а несколько копий одной и той же величины могут находиться в разных видах памяти. В этих условиях необходимо обеспечивать целостность данных или, другими словами, когерентность данных, означающую что все процессоры, если им необходимо в одно и то же время использовать одну и ту же переменную, то эта переменная для всех процессоров будет иметь одно и то же значение. А это означает, что изменения одной и той же величины в разных процессорах должны выполняться только последовательно.
В узлах современных компьютеров SMP-архитектуры когерентность реализуется аппаратными средствами. Для этого имеется специальная шина слежения (snoopy bus), через которую происходит передача значений данных, обновляемых некоторым процессором, на другие процессоры, запрашивающие эти данные. Идентификация одних и тех же данных в разных кэшах происходит по их отношению к одной и той же части оперативной памяти. Например, в архитектуре Cray SuperServer 6400 SMP используются четыре шины. Для поддержки когерентности все процессоры подсоединяются к каждой из четырех шин и реализуют протокол следящей шины.
Архитектуры с поддержкой когерентности данных получили название архитектур с неоднородным доступом к памяти— NUMA (Non-Uniform Memory Access). Имеется ряд разновидностей NUMA архитектур. В архитектуре CC-NUMA для SMP компьютеров поддерживается когерентность кэшей внутри каждого узла. Комбинация элементов SMP и MPP имеет место вархитектуре NUMA-Q, предложенной компанией Sequent Corp., ныне входящей в IBM.
В NUMA-Q вычислительные модули (quads) включают каждый четыре процессора, связанных высокоскоростной шиной. Множество таких модулей используются в качестве строительных блоков для формирования одного узла NUMA-Q, управляемого единой операционной системой. Модули одного узла соединены с общей оперативной памятью с помощью моста и внутренних для модулей шин. Используется протокол SCI (Scalable Coherent Interface). Такая конфигурация обеспечивает гораздо более короткий путь для сигналов обращения к памяти, чем общепринятая архитектура общей шины, которая требует, чтобы сигнал прошел весь путь по шине. Подавляющее большинство обращений к памяти при выполнении любой транзакции происходит внутри одного модуля.
С помощью NUMA систем наиболее успешно решаются задачи, имеющие малое пересечение данных, либо при пересечении все процессы могут быть исполнены в рамках одного модуля. Поэтому требуется программное обеспечение, организующее вычислительный процесс в соответствии с принципами NUMA так, чтобы связанные по данным процессы находились в одном модуле.
В архитектурах DM-MIMD проблемы когерентности решаются на программном уровне, поэтому число узлов может быть заметно большим, чем в системах SM-MIMD. В частности, в узлах компьютеров MPP-архитектуры используются свои копии ОС и свое адресное пространство, поэтому не требуется аппаратная поддержка когерентности, она поддерживается программными средствами. Узлы в MPP обычно состоят из одного процессора, небольшой памяти и нескольких устройств ввода-вывода. Настройка производительности MPP-систем включает распределение данных для того, чтобы минимизировать трафик между узлами.
Таким образом, практически все виды параллельных систем по классификации Флинна относятся к одной группе MIMD. Многие специалисты придерживаются классификации MIMD, представленной на рис. 4 [1], где DM-MIMD названымультикомпьютерами, а SM-MIMD — мультипроцессорами:
|
|

Рис. 4. Типы компьютеров MIMD
Данный поход позволяет различать два важных типа многопроцессорных систем – multiprocessors (мультипроцессоры или системы с общей разделяемой памятью) и multicomputers (мультикомпьютеры или системы с распределенной памятью).
Список Top500 — см. здес