

2.МЕХАНИЧЕСКИЕ ЧЕТЫРЕХПОЛЮСНИКИ
2.1.Определение механических четырехполюсников
Данный раздел использует терминологию монографии [1], но по части проектирования вибрационных фильтров следует учебнику [2], содержащему более богатый материал (правда, относящийся к электрическим цепям). Механические цепи, отвечающие линейным динамическим системам с сосредоточенными массами, упругими и вязкими элементами, имеют аналогию с линейными электрическими цепями [3]. Упомянутые элементы механической цепи являются двухполюсниками. При исследовании затухания либо усиления колебаний в определенной точке (полюсе) механической цепи при приложении вибронагрузки в другом полюсе, в зависимости от частоты вибровозбуждения, необходимо ввести понятие механического четырехполюсника.
Механическим четырехполюсником называется механическая цепь, для которой рассматривается связь переменных состояния в двух полюсах. Поскольку переменные состояния в полюсах отсчитываются относительно неподвижной системы отсчета, в модели формально присутствует связанный с ней полюс. Оператор представляет собой четырехполюсник, связывающий две переменные сил и/или скоростей в рассматриваемых полюсах относительно неподвижной системы отсчета с двумя оставшимися переменными.
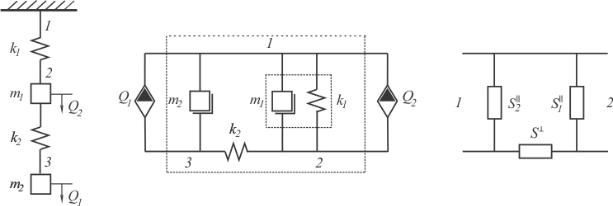
В качестве примера рассмотрим две массы m1,m2 , последовательно соединенных пружинками с жесткостями k1,k2 , подвешенных к
неподвижному кронштейну (рис. 2.1, а). Каждая из масс независимо возбуждается вибронагрузками с одинаковой частотой и амплитудами Q1 и
Q2 . Строя механическую цепь рассматриваемой динамической системы
(рис. 2.1, б), можно выделить из нее четырехполюсник и обозначить переменные состояния на его «входе» (условно ― слева четырехполюсника) Q1,v1 и «выходе» (справа четырехполюсника) Q2 ,v2 . Если пара переменных
Qi ,vi таковы, что Qi / vi > 0, полагается, что ими к четырехполюснику приложена активная нагрузка. Если для пары переменных Qj ,vj будет Qj / vj < 0 , к данному полюсу динамической системы приложена пассивная нагрузка и, чтобы учесть это при составлении уравнений, переменная Qj
17
будет снабжаться отрицательным знаком: −Qj . В рассматриваемой схеме возможны любые сочетания активных и пассивных нагрузок.
Рис. 2.1. Пример динамической системы и отвечающий ей механический четырехполюсник
Обратимся к составлению уравнений оператора механического четырехполюсника. Активные силы Q1,Q2 связываются со скоростями v1,v2
матрицей сопротивлений
Q1 = S11v1 + S12v2 |
S11 |
S12 |
|
|
||||
Q = S |
v + S |
v |
S = S |
21 |
S |
22 |
. |
(2.1) |
2 |
21 1 |
22 2 |
|
|
|
|
||
Если входными переменными являются скорости v1,v2 , то с силами Q1,Q2 их связывает матрица подвижностей
v1 = L11Q1 + L12Q2 |
L11 |
L12 |
|
|
−1 |
. |
(2.2) |
v = L Q + L Q |
L = L |
L |
|
= S |
|
||
2 21 1 22 2 |
21 |
22 |
|
|
|
|
|
Связь переменных состояния Q1,v1 , порожденных активной нагрузкой, на входе с переменными состояния −Q2 ,v2 , порожденных пассивной нагрузкой, на выходе осуществляется оператором
Q1 = −B11Q2 + B12v2 |
B11 |
B12 |
|
|
|
v = −B Q + B v |
B = B |
B |
. |
(2.3) |
|
1 |
21 2 22 2 |
21 |
22 |
|
|
Из (2.1)‒(2.3) видно, что четырехполюсник характеризуется четырьмя параметрами, называемыми первичными, которые являются
18
комплекснозначными и зависят от частоты колебаний. Параметры матрицы B выразим через параметры матрицы S :
|
|
|
B |
= − |
S11 |
, |
B |
|
= − |
S |
, |
B |
|
= − |
1 |
|
, |
B |
= − |
S22 |
, |
|
|
(2.4) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
11 |
|
|
|
S21 |
|
12 |
|
|
|
S21 |
|
|
21 |
|
|
|
S21 |
|
22 |
|
|
S21 |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
S |
|
= |
B11 |
|
, |
S |
|
= − |
B |
, |
S |
21 |
= − |
1 |
|
, |
S |
22 |
= |
B22 |
, |
|
|
|
(2.5) |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
11 |
|
|
B21 |
|
12 |
|
|
|
|
B21 |
|
|
|
|
|
B21 |
|
|
B21 |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
L = |
S22 |
= |
B22 |
|
, L = − |
S12 |
|
= − |
B |
, |
|
L |
|
= − |
S21 |
|
= |
1 |
, |
L = |
S11 |
= − |
B11 |
, (2.6) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||||||||||||||
11 |
S |
|
B12 |
|
12 |
|
|
S |
|
|
B12 |
|
21 |
|
|
S |
|
|
B12 |
|
22 |
|
|
S |
|
B12 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
где S = S11S22 − S12S21 , B = B11B22 − B12B21 ― определители матриц S и B .
Первичные параметры четырехполюсника теоретически определяются соотношениями
|
S |
= Q1 |
|
|
, |
S |
21 |
= Q2 |
|
|
|
, |
S |
= Q1 |
|
|
, |
S |
22 |
= Q2 |
, |
(2.7) |
||||||||||||||||||||||
|
|
11 |
|
v1 |
|
|
|
|
|
v1 |
|
|
|
|
12 |
|
|
v2 |
|
|
|
|
|
|
v2 |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
v =0 |
|
|
|
|
v =0 |
|
|
|
v =0 |
|
|
|
|
|
|
v =0 |
|
|
||||||||||||||||||||||
|
|
|
2 |
|
|
|
2 |
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|||||||||||||||||||||
|
L |
|
= |
v1 |
|
|
|
|
, |
L |
|
= |
v2 |
|
|
|
|
|
, |
L |
= |
v1 |
|
|
|
|
, |
L |
|
= |
v2 |
|
|
|
|
|
, |
(2.8) |
||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
11 |
|
Q1 |
|
|
|
|
|
21 |
|
Q1 |
|
|
|
|
|
|
12 |
|
|
Q2 |
|
|
|
|
|
22 |
|
|
Q2 |
|
|
|
|
|
|
||||||||
|
|
|
|
Q =0 |
|
|
|
|
|
Q =0 |
|
|
|
|
|
Q =0 |
|
|
|
|
|
|
Q =0 |
|
|
|||||||||||||||||||
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|||||||||||||||||||||
B |
|
= − Q1 |
|
|
, |
B |
|
= − |
v1 |
|
|
|
, B |
|
= Q1 |
|
, |
|
B |
|
= |
v1 |
|
|
, |
(2.9) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
11 |
|
|
Q2 |
|
|
|
|
21 |
|
|
Q2 |
|
|
12 |
|
v2 |
|
|
|
|
22 |
|
v2 |
|
|
|
||||||||||||||||||
|
|
|
|
v |
=0 |
|
|
|
|
|
v |
=0 |
|
|
|
Q |
=0 |
|
|
|
|
|
Q |
=0 |
|
|||||||||||||||||||
|
|
|
2 |
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
2 |
|
|
||||||||||||||||||||||||
непосредственно следующими из (2.1)‒(2.3). Видно, что первичные параметры представляют собой сопротивления, подвижности и некоторые безразмерные величины при определенных кинематических или силовых ограничениях. Условия vi = 0, i = 1, 2 соответствуют закороченным полюсам на
входе или выходе (при мгновенной остановке), а условия Qi = 0, i = 1, 2 ― разомкнутым полюсам на входе или выходе (на холостом ходу).
В некоторых частных случаях четырехполюсник имеет меньше четырех независимых параметров. У обратимого четырехполюсника отношение силы на входе к скорости на выходе не зависит от того, что считать входом, а что ― выходом, то есть
S |
= Q1 |
|
|
= Q2 |
|
= S |
21 |
, |
(2.10) |
12 |
v2 |
|
|
v1 |
|
|
|
|
|
|
v |
=0 |
v |
=0 |
|
|
|
||
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
19 |
|
|
|
|
|
откуда
L12 = L21 , |
(2.11) |
и, с учетом (2.5),
B = B11B22 − B12B21 =1, |
(2.12) |
то есть такой четырехполюсник характеризуется унитарной матрицей B .
Обратимый четырехполюсник характеризуется тремя независимыми параметрами. Для симметричного четырехполюсника перемена местами входа и выхода не изменяет скоростей и сил в его цепи, что эквивалентно любому из условий
S12 |
= S21, |
S22 |
= S11 |
, |
(2.13) |
|
L12 |
= L21, |
L22 |
= L11 |
, |
(2.14) |
|
B = B , |
B2 |
=1+ B B . |
(2.15) |
|||
22 |
11 |
11 |
|
12 |
21 |
|
Симметричный четырехполюсник всегда является обратимым и характеризуется двумя независимыми параметрами.
Интересует возможность соединения механических четырехполюсников в цепи. Из рассмотренных выше операторов (2.1)‒(2.3) только последний предполагает цепное правило для матриц
B = B1B2 . |
(2.16) |
при каскадном соединении четырехполюсников 1 и 2, у которых нагрузка на входе полагается активной, а выходе ― пассивной. Согласно правилу (2.16), в результате каскадного соединения обратимых четырехполюсников получается обратимый четырехполюсник, что следует из свойств определителя произведения унитарных матриц. Симметрия четырехполюсника, образованного каскадным соединением симметричных четырехполюсников, требовала бы коммутативности произведения матриц, поэтому в общем случае она не будет иметь места.
20