

3.Основные теоретические сведения элементов векторного анализа.
Классическая электродинамика основана
на представлении о непрерывном
электрическом заряде и сплошной
(непрерывной) покоящейся среде. В среду
вводится покоящаяся ортогональная
система координат, в которой определена
покоящаяся точка наблюдения
![]() .
В частности, в декартовой системе
координат (ДСК)
.
В частности, в декартовой системе
координат (ДСК)
![]() .
В математическом смысле непрерывные
функции координат
.
В математическом смысле непрерывные
функции координат
![]() описывают
реально существующее физическое поле
в каждой точке
описывают
реально существующее физическое поле
в каждой точке
![]() .
.
Для описания физических полей принято
использовать их математические модели
– скалярные и векторные поля. В
произвольной системе координат
![]() скалярное поле φ приобретает вид
некоторой функции φ
скалярное поле φ приобретает вид
некоторой функции φ![]() ,
принимающей численные значения –
действительные или комплексные. Векторное
поле А задается тремя проекциями на
единичные векторы (орты) выбранной
системы координат:
,
принимающей численные значения –
действительные или комплексные. Векторное
поле А задается тремя проекциями на
единичные векторы (орты) выбранной
системы координат:
![]() (3)
(3)
Для характеристики величины и направления скорости изменения скалярного поля в пространстве вводят градиент этого поля:
![]() (4)
(4)
где
![]() ,
,
![]() - коэффициенты Лямэ по координатам
- коэффициенты Лямэ по координатам
![]() ,
являющиеся коэффициентами пропорциональности
между дифференциалами обобщенных
координат и бесконечно малыми ребрами
элементарного параллелепипеда в
выбранной точке пространства.
,
являющиеся коэффициентами пропорциональности
между дифференциалами обобщенных
координат и бесконечно малыми ребрами
элементарного параллелепипеда в
выбранной точке пространства.
Значения коэффициентов Лямэ для наиболее употребительных координатных систем:
декартова система координат
![]()
![]() ;
;
цилиндрическая система координат
![]() )
)
![]() ;
;
сферическая система координат
![]()
![]()
Конкретно градиент вычисляют следующим образом:
в декартовой системе координат
![]() (5)
(5)
в цилиндрической системе координат
![]() (6)
(6)
в сферической системе координат
![]() (7)
(7)
Описание дифференциальных свойств векторного поля несколько сложнее. Векторное поле A принято характеризовать скалярным полем – дивергенцией div A и векторным полем – ротором rot A. Значение дивергенции равно плотности источников рассматриваемого поля в заданной точке пространства. Трактовка ротора векторного поля сложнее; можно считать, что оно в известном смысле характеризует степень отличия исследуемого поля от однородного.
Дивергенцию векторного поля A вычисляют путем дифференцирования его проекций по определенным правилам:
в декартовой системе координат
![]() (8)
(8)
в цилиндрической системе координат
![]() (9)
(9)
в сферической системе координат
![]() (10)
(10)
В произвольной ортогональной криволинейной системе координат
![]() (11)
(11)
Проекции ротора векторного поля имею вид:
в декартовой системе координат
![]()

![]()
![]()
в цилиндрической системе координат
![]()

![]() (13)
(13)

в сферической системе координат
сферической системе координат
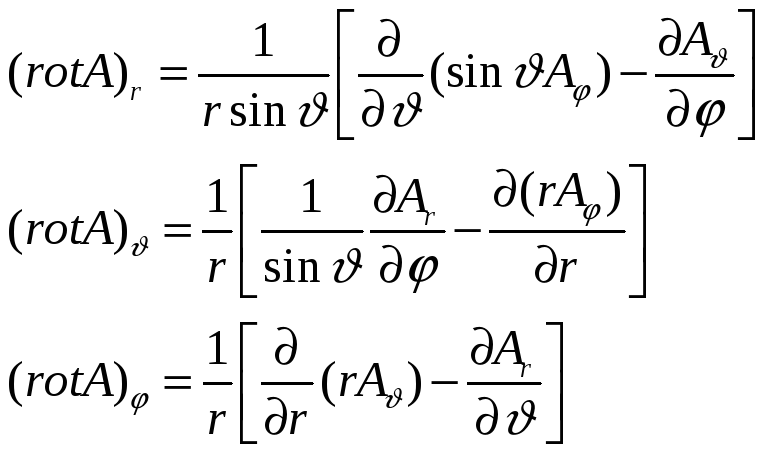 (14)
(14)
Ротор векторного поля A в произвольной системе координат выражают через проекции исходного поля и коэффициенты Лямэ:
 (15)
(15)
Дифференциальные операции со скалярными
и векторными полями удобно записывать
с помощью оператора Гамильтона
![]() .
По определению
.
По определению
![]() (16)
(16)
В декартовой системе координат оператора Гамильтона есть символический вектор
![]() (17)
(17)
Из дифференциальных векторных операций
второго порядка широкое применение в
электродинамике находит оператор
![]() ,
закон действия которого на векторное
поле A описывается
соотношением
,
закон действия которого на векторное
поле A описывается
соотношением
![]() (18)
(18)
Дифференциальная операция второго порядка, действующая на скалярное поле, задается оператором Лапласа
![]()
Оператор Лапласа в различных координатных системах записывается следующим образом:
в декартовой системе координат
![]() (19)
(19)
в цилиндрической системе координат
![]() (20)
(20)
в сферической системе координат
![]() (21)
(21)
Для графического изображения векторных полей принято строить картину их силовых линий.