

Лекции
.pdfУсловие образования кругового потока (пространственно обмотки сдвинуты на 90 электрических градусов):
j I B WB K обB |
= I A WA K обA |
|
|
(2.92) |
||
Векторная диаграмма построена для случая WA = WB, IA = IB, КобА = КобВ, |
||||||
т.е. случая совершенно одинаковых обмоток, и ϕA + ϕB = 90о. |
|
|||||
I |
I |
A |
|
|
UC |
|
|
|
|
|
UB |
|
|
|
|
|
|
|
|
|
|
IB |
|
|
I |
|
|
UB |
B |
|
UC |
|
|
|
|
|
|
|
|||
|
|
|
A |
IA |
ϕΒ |
IB |
|
|
|
|
|||
|
|
|
UA |
|
ϕΑ |
|
|
|
|
UA |
|
|
|
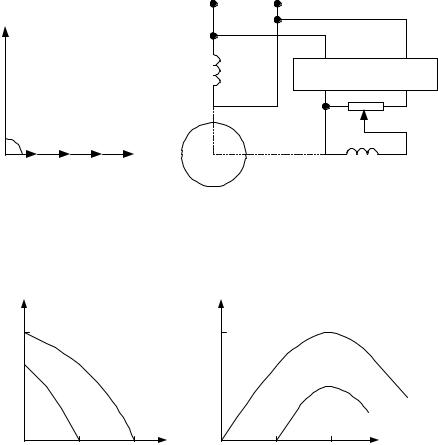
Рис. 3.35. Электрическая схема и векторная диаграмма конденсаторного АД
Из векторной диаграммы видно, что для указанных условий потребляемый ток I совпадает по фазе с напряжением обмотки UВ или напряжением сети. Это означает, что конденсаторный АД для сети представляет собой чисто активную нагрузку. Таким образом, коэффициент мощности cos ϕ = 1 и энергетический КПД равный η.cos ϕ является достаточно высоким.
Конденсаторный АД находит широкое применение как исполнительный двигатель для однофазной цепи.
Для улучшения пусковых свойств однофазного АД с конденсатором параллельно рабочей емкости на время пуска можно подключать пусковую емкость. Оба конденсатора позволяют создавать круговой магнитный поток при пуске двигателя. Поскольку токи в фазах однофазного АД или конденсаторного АД зависят от скольжения, т.е. от скорости вращения ротора, то условие образования кругового магнитного потока выполняется только для одной скорости вращения ротора или скольжения. Чаще всего имеется в виду номинальный режим. При других скоростях магнитный поток будет эллиптическим.
Схемы однофазного включения трехфазного АД.
Трехфазный АД можно включать в качестве однофазного. Некоторые из этих схем включения приводятся на рис. 2.36.
71

~ U |
C1 |
C1 |
~U |
|
|
|
|
||
C6 |
C4 |
C |
C4 |
C |
C |
|
|||
|
|
6 |
5 |
|
|
C5 |
|
|
|
|
|
|
|
|
C3 |
C |
C3 |
|
C |
C2 |
|
2 |
Рис. 2.36. Схемы включения трехфазного АД в качестве однофазного
2.13. ДВУХФАЗНЫЕ АД
Двухфазные или исполнительные (управляемые) АД (ИАД). Требования к ИАД.
Исполнительные АД находят широкое применение в автоматике, т.к. позволяют плавно и в широком диапазоне регулировать частоту вращения ротора. В основном это микромашины, т.е. машины с мощностью на валу до 500 Вт. Требования к ИАД следующие:
1. Исполнительные АД должны иметь линейные механические и регулировочные характеристики. Механическая характеристика в относительных единицах – это зависимость ν(m) при α=const (α – сигнал управления, величина в общем случае варьируемая), где ν – относительная скорость вращения ротора, т.е. скорость вращения ротора, отнесенная к скорости идеального холостого хода при α=1; m – относительный момент, т.е. момент отнесенный к пусковому моменту при α=1. Относительные единицы равны:
v = |
n |
m = |
M |
|
α = |
Uу |
|
|
|
2 |
, |
|
, |
|
, |
(2.93) |
|||
|
M п |
Uв |
|||||||
|
n2хх |
|
|
|
|
|
|||
где n2хх – скорость идеального холостого хода; Мп – пусковой момент; Uу – напряжение на обмотке управления; Uв – напряжение на обмотке возбуждения.
Регулировочная характеристика – это зависимость ν(α) при m=const (в общем случае величина m – варьируемая).
2. Необходимо, чтобы ИАД обладали высоким быстродействием, т.е. имели малую величину электромеханической постоянной времени:
T M |
= |
I p Ω xx |
, |
(2.94) |
|
||||
|
|
M п |
|
|
где Iр – момент инерции ротора; Ωхх – скорость холостого хода; Мп – пусковой момент. Обычно ТМ = 0,02÷0,05с для реальных двигателей.
3. Отсутствие самохода ротора, т.е. необходимость самоторможения и остановки двигателя при отключении или снятии сигнала с обмотки управления.
72
4. Большая величина пускового момента.
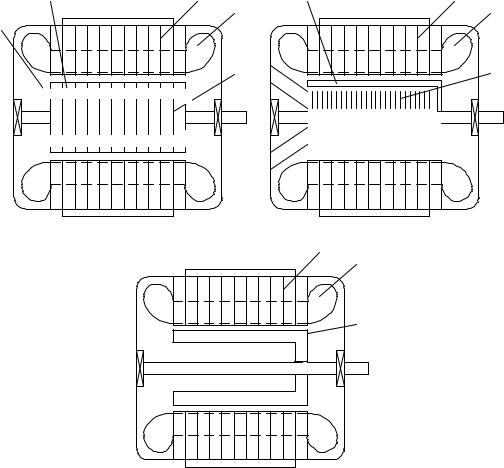
Выполнение второго и третьего условий достигается тем, что ИАД делаются удлиненной конструкции, т.е. длина ротора в 3÷5 раз превышает диаметр ротора. Это позволяет уменьшить момент инерции ротора Iр и соответственно ТМ. Линейность характеристик, отсутствие самохода и большая величина пускового момента обеспечиваются увеличением критического скольжения Sк до 2÷3. Увеличенное критическое скольжение реализуется в трех конструкциях ИАД (рис. 2.37).
Указанные специфические требования являются определяющими и заставляют в ряде случаев отказываться от традиционных конструкций машин общего применения, что ведет к увеличению габаритных размеров и массы, уменьшению КПД и пр.
4 |
1 |
|
2 |
5 |
|
|
3 |
4 |
1 |
2
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
б |
|
|
|||||||||||||||||
1
2
3
в
Рис. 2.37. Конструкции ИАД
Конструкция а: 1 – шихтованный сердечник с двухфазной обмоткой 2 статора: обмотка возбуждения (ОВ) и обмотка управления (ОУ) сдвинуты в пространстве на 90 электрических градусов. 3 – шихтованный сердечник ротора с пазами. В пазы укладывают латунные стержни 4 с короткозамкнутыми кольцами 5. Повышенное удельное электрическое сопротивление латуни, малое сечение стержней увеличивают приведенное роторное сопротивление r'2 и критическое скольжение Sк до 2÷3 (2.83).
73

С точки зрения энергетических характеристик конструкция а лучшая, т.к. позволяет обеспечивать малый немагнитный зазор между статором и ротором, меньший намагничивающий ток, больший cos ϕ и больший КПД. Но по сравнению с обычным трехфазным АД или конденсаторным АД энергетические характеристики значительно ниже. И этим в данном случае пренебрегают, т.к. достигается основная цель – увеличение критического скольжения Sк и, вследствие этого, линейность характеристик и отсутствие самохода.
Конструкция б: 1 – сердечник, двухфазная статорная обмотка 2, внутренний сердечник 3, между сердечниками 1 и 3 находится ротор 4 в виде полого немагнитного стакана из алюминиевого сплава или бронзы. Материал увеличивает удельное электрическое сопротивление, а тонкостенность стакана (приблизительно десятые доли мм) также увеличивает r'2 и Sк.
Конструкция б дает большую линейность регулировочных и механических характеристик и меньшую электромеханическую постоянную времени ТМ из-за уменьшения момента инерции ротора Iр вследствие малой массы ротора.
Энергетические характеристики хуже, чем у конструкции а, потому что немагнитный зазор состоит из двух воздушных зазоров и толщины стенки стакана. При этом увеличивается магнитное сопротивление немагнитного зазора, увеличивая тем самым намагничивающий ток и уменьшая произведение η.cos
ϕ.
Конструкция в: 1 – сердечник, 2 – двухфазная статорная обмотка, 3 – полый ротор из магнито-мягкой стали. Толщина стенки ротора 2÷3 мм. Ротор одновременно является магнитопроводом для прохождения магнитного потока.
Ротор механически и термически более устойчив. По своим характеристикам он занимает промежуточное положение между конструкциями а и б. Применяется при высоких температурах и больших вибрациях.
Отсутствие самохода при отключении сигнала с обмотки управления можно проследить по следующим механическим характеристикам ИАД, представленным на рис. 2.38.
Мэм |
1 |
|
|
|
|
|
2 |
|
Мн |
|
4 |
|
|
|
Sн |
|
|
1 |
2 |
S |
|
3 |
|
Рис. 2.38. Механические характеристики ИАД |
||
Пусть работают обе обмотки: ОВ и ОУ – имеем для этого случая характеристику 1. Двигатель работает, развивая номинальный момент Мн и номинальное скольжение Sн. Сняли сигнал с ОУ, следовательно работает только ОВ и двигатель можно рассматривать как однофазный, в котором создается пульсирующий магнитный поток и две механические характеристики: 2 – для прямовращающейся и 3 – для
74
обратновращающейся МДС, 4 – результирующая механическая характеристика для пульсирующей МДС.
При снятии сигнала управления ротор мгновенно частоту вращения изменить не может и происходит переход с характеристики 1 на характеристику 4, а характеристика 4 при скольжении Sн имеет отрицательный электромагнитный момент и двигатель начинает эффективно тормозиться до S = 1, т.е. до неподвижного состояния.
Линейность механической характеристики 1 и отсутствие самохода обусловлено большим критическим скольжением.
В однофазном двигателе общего применения Sк небольшое, поэтому результирующий электромагнитный момент больше нуля в довольно широком диапазоне частот вращения (S < 1). Следовательно, при снятии сигнала управления он будет продолжать работать с некоторой установившейся частотой вращения, поэтому использовать такой двигатель в качестве исполнительного невозможно, так как при α = 0 он не останавливается, т.е. теряет управление.
Способы управления ИАД.
Применяются три способа: амплитудное, фазовое и амплитудно-фазовое управление.
При амплитудном управлении временной сдвиг между МДС обмотки возбуждения Fв и МДС обмотки управления Fу обеспечивается равным 90 электрическим градусам фазосдвигающей схемой, изменяется только величина МДС управления (рис. 2.39).
|
~U |
Fв |
|
ОВ |
Фазосдвигающая |
|
схема |
900 |
|
Fу |
ОУ |
|
Рис. 2.39. Векторная диаграмма МДС и электрическая схема амплитудного управления
Примерный вид относительных характеристик при амплитудном управлении изображен на рис. 2.40.
|
ν |
|
|
1 |
|
|
1 |
|
α=1 |
|
|
|
α=0,5 |
|
|
0 |
0,5 |
1 |
m |
|
ν |
m=0 |
|
|
|
|
|
|
|
m=0,5 |
|
0 |
0,5 |
1 |
α |
Рис.2.40. Механические и регулировочные характеристики ИАД
75

Реальные механические характеристики при амплитудном управлении нелинейны, что обусловлено влиянием индуктивного сопротивления Xр2. У регулировочных характеристик линейность сохраняется только на начальном участке. Уравнение, по которому можно построить эти характеристики при амплитудном управлении:
m = α − |
1 +α 2 |
ν . |
(2.95) |
|
2 |
||||
|
|
|
При фазовом управлении МДС возбуждения и управления по величине не меняются, а изменяется их временной сдвиг ψ, при изменении сдвига фаз между векторами напряжений возбуждения и управления с помощью фазорегулято-
ра (рис. 2.41).
|
~U |
Fв |
|
ОВ |
Фазорегулятор |
ψ |
|
Fу |
ОУ |
Рис. 2.41. Векторная диаграмма МДС и электрическая схема фазового управления ИАД
При амплитудно-фазовом управлении изменяются величины и фазы МДС управления и возбуждения (рис. 2.42).
|
|
~U |
Fв |
F' |
в |
|
|
ОВ |
|
ψ' |
F'у |
|
|
ОУ |
|
|
Fу |
Рис. 2.42. Векторная диаграмма МДС и электрическая схема амплитудно-фазового управления
При амплитудно-фазовом управлении при передвижении движка потенциометра изменяется напряжение на ОУ, МДС ОУ Fу, степень эллиптичности вращающегося магнитного потока и, следовательно, изменяется величина обратновращающегося магнитного потока и тормозной момент, вызванный этим потоком.
Частота вращения ротора изменяется при сохранении момента сопротивления, приложенного к валу, изменяется скольжение, ток в обмотках, падение
76
напряжения на конденсаторе, величина и фаза напряжения на ОВ, Fв и взаимный фазовый сдвиг между Fв и Fу .
Принцип регулирования частоты вращения состоит в том, что, при изменении сигнала ОУ, изменяется степень эллиптичности вращающегося магнитного потока, что при неизменном моменте сопротивления приводит к изменению частоты вращения ротора.
С точки зрения простоты реализации третий способ наилучший, потому что не нужно специальных фазосдвигающих и фазорегулирующих устройств, но по степени линейности характеристик – это наихудший способ управления. По степени линейности характеристик наилучший способ – фазовый.
Амплитудное регулирование по возможности реализации схемы и степени линейности характеристик является промежуточным и находит широкое применение.
77

3. СИНХРОННЫЕ МАШИНЫ
Синхронные машины – это электрические машины переменного тока, у которых частота вращения ротора n2 в некотором диапазоне нагрузок остается неизменной и равной n1, где n1 = 60.f/p – частота вращения магнитного потока статора, р – число пар полюсов в машине.
3.1. КЛАССИФИКАЦИЯ СИНХРОННЫХ МАШИН
По назначению синхронные машины (СМ) можно разделить на генераторы, двигатели и специальные СМ.
По способу возбуждения СМ можно разделить на СМ с электромагнитным возбуждением и возбуждением от постоянных магнитов.
По конструкции ротора СМ различают на СМ с явнополюсным ротором и СМ с неявнополюсным ротором. Конструкции различных роторов представлены на рис. 3.1.
2
2
|
N |
+ |
U - |
5 |
+ |
U |
- |
4 |
1 |
|
|
|
|
N |
|
|
|
3
|
S |
|
|
6 |
|
S |
5 |
|
|
|
|
|
|
||
|
а |
|
4 |
|
1 |
б |
3 |
|
|
|
|
|
|||
|
р =1 |
|
|
|
|
р =1 |
|
|
Явнополюсный |
|
|
|
Неявнополюсный |
||
N |
в |
|
N |
|
|
N |
|
|
S |
S |
г |
S |
S |
д |
|
S |
р =1 |
|
N |
р =2 |
|
N |
р =2 |
Явнополюсный |
|
Явнополюсный |
|
Неявнополюсный |
|||
|
|
|
|
|
|||
Рис. 3.1. Конструкции роторов СМ
Рассмотрим явнополюсный ротор с электромагнитным возбуждением (рис. 3.1, а). Он состоит из сердечника 1, полюсных наконечников 2, обмотки возбуждения 3, контактных колец 4, медно-графитовых щеток 5, вала 6.
Сердечник 1 и полюсные наконечники 2 выполняются сплошными из магнито-мягкой стали, хорошо проводящей магнитный поток. Полюсные наконечники 2 профилируют так, чтобы распределение магнитной индукции по окружности статора (якоря) было близко к синусоидальному. Якорем называется часть электрической машины, в которой индуктируется ЭДС.
Эта конструкция применяется в мощных СМ с относительно небольшой частотой вращения и она, как правило, многополюсная.
Неявнополюсный ротор с электромагнитным возбуждением (рис. 3.1, б) состоит из сердечника 1 с пазами, куда укладывается обмотка возбуждения 2.
78

Имеются также контактные кольца 3, щетки 4, вал 5. Полюсы такого ротора |
|||||
можно определить, например, с помощью внешнего магнита с известной поляр- |
|||||
ностью полюсов по признакам: одноименные полюсы отталкиваются, разно- |
|||||
именные – притягиваются. |
|
|
|
|
|
Эта конструкция применяется в СМ большой мощности и большей часто- |
|||||
ты вращения. |
|
|
|
|
|
На рис. 3.1, в, г, д приведены роторы-магниты, применяемые в СМ отно- |
|||||
сительно малой мощности, чаще всего в микромашинах (до 500 Вт). |
|
||||
B, Тл |
Постоянные |
магниты |
выполняются |
из |
|
Br |
сплавов, имеющих широкую петлю гистерезиса |
||||
|
и запасающих в себе большую магнитную энер- |
||||
HC |
гию. Эта энергия характеризуется большими ос- |
||||
таточной индукцией Вr и коэрцитивной силой НC |
|||||
|
|||||
H, А/м (рис. 3.2). |
|
|
|
||
|
Роторы намагничиваются на специальных |
||||
|
установках, а некоторые намагничиваются при |
||||
Рис.3.2. Петля гистерезиса |
высокой температуре – это намагничивание на- |
||||
зывается термомагнитной обработкой ротора. В |
|||||
постоянных магнитов |
|||||
результате этой обработки элементарные доме- |
|||||
|
|||||
|
ны оказываются расположенными вдоль маг- |
||||
нитных линий. Это повышает магнитную энергию ротора. |
|
|
|||
3.2. УСТРОЙСТВО СИНХРОННЫХ МАШИН
Синхронная машина состоит в основном из двух частей: статора (якоря) и ротора. Статоры СМ не отличаются от статоров АМ и могут быть трех- , двух- и однофазными. Роторы могут быть явнополюсной или неявнополюсной конструкции с электромагнитным возбуждением или возбуждением от постоянных магнитов (конструкции роторов приведены ранее). Могут применяться также СМ обращенной конструкции, когда статорная (якорная) обмотка находится на роторе, а полюсы, возбуждаемые постоянным током, – на статоре. Якорная обмотка соединяется с нагрузкой через контактные кольца и щетки.
3.3.СИНХРОННЫЕ ГЕНЕРАТОРЫ. ПРИНЦИП ДЕЙСТВИЯ
Синхронный генератор (СГ), как и любой другой генератор, преобразует механическую энергию в электрическую. Для этого ротор СГ должен приводиться во вращение вспомогательным двигателем (ВД). На гидроэлектростанции это водяная турбина, на ТЭЦ – это паровая турбина. В автономных установках – это двигатель внутреннего сгорания. В специальных установках – это может быть электродвигатель, а СГ в этом случае генерирует напряжение с частотой, отличной от частоты сети.
79

Принцип действия рассмотрим на примере трехфазного СГ с явнополюсным ротором-магнитом (рис. 3.3).
Магнитный поток Ф0 магнита идет по пути наименьшего магнитного сопротивления, замыкается по стали. Принцип действия СГ основан на двух законах электротехники: законе электромагнитной индукции и законе электромагнитных сил.
iA,eA |
|
|
|
n1 |
A |
|
|
Y |
Фa |
|
Z |
|
|
|
Fэм |
S |
Ф |
0 |
N Fэм |
|
|
|
|
C
iC,eC B
X 
iB,eB
Mвд, n2
Рис. 3.3. Конструктивная схема трехфазного синхронного генератора
При вращении ротора внешним двигателем с моментом Мвд и скоростью n2, вместе с ним вращается и основной магнитный поток Ф0. Он пересекает проводники статорной обмотки и индуктирует в них ЭДС. Направление ЭДС определяется по правилу правой руки. Эти ЭДС будут образовывать симметричную трехфазную систему:
eA = Em |
sin(ω t); |
|
||
eB = Em |
sin(ω t −120o ); |
(3.1) |
||
e |
= E |
m |
sin(ω t − 240o ). |
|
C |
|
|
|
|
Присоединим к трехфазной статорной обмотке трехфазную нагрузку. По фазам генератора и нагрузки потечет переменный ток. Сдвиг тока относительно ЭДС определяется характером нагрузки. При активной нагрузке ток в фазе совпадает с ЭДС, при активно-индуктивной – отстает от ЭДС, при активноемкостной – опережает ЭДС.
80