

КАЗАНСКИЙ НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ им. А.Н. ТУПОЛЕВА – КАИ
Кафедра Конструирование и Производство Летательных Аппаратов
Пояснительная записка
к курсовому проекту на тему:
РУЛЬ НАПРАВЛЕНИЯ
Выполнил:
студент гр. 1505
Петрова И.Г.
Преподаватель:
Русаковский Е.И.
Казань
2012
Содержание
Конструктивно-силовая схема
Техническое описание
Назначение руля направления
Выбор аэродинамической компенсации
Нормирование нагрузок
Проектировочный расчет
Построение эпюр перерезывающих усилий и изгибающих моментов
Построение эпюр крутящего и шарнирного моментов
Расчет на прочность
Список использованной литературы
Назначение руля направления
Вертикальное оперение служит для обеспечения путевой устойчивости самолета. Оно состоит из двух частей:
- неподвижной части – киль;
- подвижной части – руль направления.
Киль служит для крепления руля направления, он является основной частью вертикального оперения. Руль направления предназначен для управления самолетом по каналу рыскания, для изменения направления полета, для разворота.
Техническое описание
Руль направления крепится к килю подвижно, через узлы навески. Эти узлы навески служат опорами для рулей, которые с точки зрения строительной механики можно принимать за балки.
Вся совокупность сил, действующая на рулевые поверхности агрегата, сводится к трем факторам:
Перерезывающие силы
Изгибающие моменты
Крутящие моменты (относительно оси жесткости агрегата).
Кроме этого на рули направления действуют шарнирные моменты, это моменты относительно оси вращения.
Конструирование рулевой поверхности начинаем с выбора положения оси вращения. В системе управления рулевой поверхности не предусмотрены усилители, поэтому выбираем аэродинамическую компенсацию (смещение оси вращения назад, что приводит к уменьшению величины шарнирного момента).
Разделим рулевую поверхность по размаху на 3 секции, каждая из которых навешивается на трех узлах, что исключает возможность заклинивания под нагрузкой.
Узлы навески руля направления вильчатого типа. Кронштейн с ухом чаще крепится на неподвижной части несущей поверхности. Качалка управления рулем немного отступает от узла навески руля.
Конструктивно-силовая схема
Конструктивно-силовая схема руля – однолонжеронная. Лонжерон представляет собой балку двутаврового типа, изготавливается выкладкой из материала ЭЛУР – П – А (ВК – 36р). Поперечный набор состоит из нервюр, имеющих разрез по лонжерону и приклеенных к нему на композицию клеев ВК-5+ВК-32-200. Для крепления узлов навески в носке руля делают вырезы. Разрез нарушает контур носка, воспринимающий кручение, поэтому ставят косые нервюры, которые своим изгибом передают крутящий момент носка на участке выреза.
Верхняя и нижняя обшивка изготавливается выкладкой из стеклоткани Т-10-14 (ВК-36р) и связующего Эд-20.
Полость между нижней и верхней обшивкой заполняется сотовым заполнителем. Вся конструкция склеивается между собой на композицию клеев ВК-5+ВК-32-200 при давлении 1,5-2 кг/см2.
Выбор аэродинамической компенсации
Применяя аэродинамическую компенсацию, уменьшаем шарнирный момент, действующий на РН, что уменьшает усилие на качалку управления и систему управления.
Применяем осевую аэродинамическую компенсацию. При этом ось вращения располагается по хорде РН таким образом, чтобы шарнирный момент был минимальным.
Чтобы носок РН не вылезал в поток, будем профилировать его по радиусу.
Качалка управления располагается над первой опорой.
Нормирование нагрузок
 Исходные
данные:
Исходные
данные:
PPрн= 102000 Н
bк в.о. = 920 мм
b0 в.о. = 3200 мм
hв.о. = 3400 мм
χ в.о. = 40º
xdрн=0,292 bрн
δ = ± 20º
![]() = 0,03
= 0,03
hр.н. =2400 мм
bрн=0,38bво
b0 р.н. = 1216 мм
bк р.н. = 350 мм
Определяем значения l и b :
l0-1 = 0,25 м
l1-2 = 0,6 м
l2-3 = 1,1 м
l3-k = 0,45 м
lo-k = 2,4 м
b0 = 1,216 м
b1 = 1,126 м
b2 = 0,909 м
b3 = 0,512 м
bk = 0,350 м
Sр.н. = ((b0р.н. + bкр.н.)/2)* hр.н. = 1,88 м2
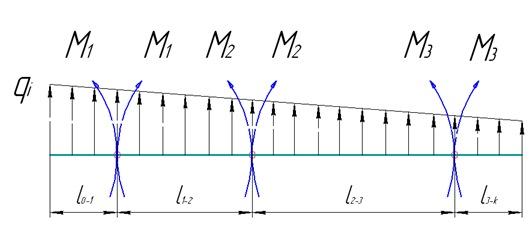
Распределяем нагрузку по размаху пропорционально хордам:
qi = Pрр.н / Sр.н. * bi
q0 = 66002,55 Н/м
q1 = 61117,5 Н/м
q2 = 49339,08 Н/м
q3 = 26867,82 Н/м
qk = 18997,45 Н/м
Проектировочный расчет
Построение эпюр перерезывающих сил и изгибающих моментов

Так как узлов навески три, то рассматриваем РН как многоопорную балку переменной жесткости на упругих опорах. В проектировочном расчете считаем опоры жесткими, а жесткость между опорами постоянной и равной жесткости в середине пролета. Для нахождения изгибающих моментов воспользуемся уравнением трех моментов.
Сначала рассчитаем момент на 1 и 3 опорах:
М1 = ((q0 + q1)/2)* (l20-1/2) = 1986,25 Н*м
М3 = ((q3 + qk)/2)* (l23-k/2) = 2368,64 Н*м
Составим уравнение трех моментов для нахождения изгибающего момента на 2 опоре:
М1 l1-2 + 2М2 (l1-2 + l2-3) + М3 l2-3 = 0.25(((q1 + q2)/2)* l31-2 + ((q2 + q3)/2) * l32-3)
Подставляя значения изгибающих моментов в 1 и 3 опорах, находим момент на 2 опоре: М2 = 3534,56 Н*м.
Определяем реакции опор:
R1 = - 0.5((q0 + q1)/2)* l0-1 + ((q1 + q2)/2)* l1-2) – М1/ l0-1 – (М1 – М2)/ l1-2 =
= - 29878 Н
R2 = - 0.5((q1 + q2)/2)* l1-2 + ((q2 + q3)/2)* l2-3) – (М2 – М1)/ l1-2 – (М2 – М3)/ l2-3 = = - 41419,6 H
R3 = - 0.5((q3 + qk)/2)* l3-k + ((q2 + q3)/2)* l2-3) – М3/ l3-k – (М3 – М2)/ l2-3 =
= - 30678 H
Определяем перерезывающие силы:
Q0 = 0 H
Q1л = ((q0 + q1)/2)* l0-1 = 15890,01 H
Q1п = Q1л + R1 = -13988 H
Q2л = Q1п + ((q1 + q2)/2)* l1-2 = 19149,01 H
Q2п = Q2л + R2 = -22270,6 H
Q3л = Q2п + ((q2 + q3)/2)* l2-3 = 20150,72 H
Q3п = Q3л + R3 = -10527,3 H
Q4 = Q3п - (q3 + qk)/2)* l3-k = 0 H
Определяем максимальные изгибающие моменты:
Участок 1-2:
Qz(x1-2) = ((q0 + q1)/2)* l0-1 + ((q1 + q2)/2)* x1-2 + R1 = 0
x1-2 = (- R1 - ((q0 + q1)/2)* l0-1)/ ((q1 + q2)/2) = 0,253 м
Mx(x1-2) = - ((q0 + q1)/2)* l0-1*((l0-1/2) + x1-2) - ((q1 + q2)/2)* (x21-2 /2) - R1*( x1-2/2)
Mx(0,253) = - 3998,52 H*м
Участок 3-2:
Qz(x3-2) = ((q3 + qk)/2)* l3-k + ((q2 + q3)/2)* x3-2 + R3 = 0
x3-2 = (- R3 - ((q3 + qk)/2)* l3-k)/ ((q2 + q3)/2) = 0,522 м
Mx(x3-2) = - ((q3 + qk)/2)* l3-k*((l3-k/2) + x3-2) - ((q2 + q3)/2)* (x23-2 /2) – R3*(x3-2/2)
Mx(0,522) = - 5118,98 H*м
Строим эпюры перерезывающих сил и изгибающих моментов:
