

книги / Теория механизмов и механика систем машин
..pdfДалее последовательно находим:
Fxik Xk FD sin k ; |
Fyik Yk FD cos k ; |
(4.30) |
|
FBx Fxik Xi ; FBy Fyik Yi . |
|||
|
|||
Если реакция FD получилась не равной нулю, то из (4.28) найдем величину (DD ) :
(DD ) |
aky Xk akxYk M zk |
. |
(4.31) |
|
|||
|
FD |
|
|
Если же FD получилась равной нулю, то из (4.28) найдем момент в поступательной паре:
FD (DD ) aky X k akxYk M zk . |
(4.32) |
4.2. Cилы, действующие на звенья механизма
Силовой расчет дает возможность по заданным весам звеньев, силам инерции, силам сопротивления определять реакции в кинематических парах и движущие силы, необходимые для определения сил полезного сопротивления.
Определение движущей силы позволяет, предварительно оценив потери на трение, решить вопрос о потребной мощности двигателя для привода механизма.
Движущие силы направлены в сторону перемещения их точек приложения или составляют с этими перемещениями острые углы. Движущие силы приложены к ведущим звеньям механизма и совершают положительную работу.
Силы сопротивления направлены против перемещения их точек приложения или составляют с этими перемещениями тупые углы. Силы сопротивления совершают отрицательную работу и подразделяются на производственные силы сопротивления и силы трения.
Силы производственных сопротивлений, для преодоления которых создан механизм, приложены к исполнительным звеньям.
Силы трения (качения, скольжения) возникают в кинематических парах.
Силы тяжести звеньев приложены в центре масс звена и могут совершать как положительную, так и отрицательную работы или не совершать никакой (если центр масс звена не перемещается или остается на одном горизонтальном уровне).
81
4.3. Условия, налагаемые структурой механизмов на определение усилий в кинематических парах
Было установлено, что кинематическая цепь любого стержневого механизма с одной степенью подвижности может быть получена путём присоединения к механизму первого класса структурных групп. Характерное свойство любой из групп – равная нулю подвижность при присоединении к звеньям кинематической цепи. Это значит, что, присоединяя структурные группы к механизму первого класса, получаем новую систему, подвижность которой равна подвижности исходной. В присоединённой группе число степеней свободы равно числу условий связи. Если обозначить число звеньев группы через n, а число пар пятого класса, образовавшихся при присоединении, через p5, то число степеней свободы будет равно 3n, а число условий связей, налагаемых парами пятого класса, – 2p5, вышесказанное можно записать формулой
3n = 2p5.
Это и есть условие образования структурных групп, простейшая из которых содержит два звена и три кинематические пары пятого класса. Данному равенству можно дать и другое толкование. Число три есть число уравнений статики для одного звена, а два – число независимых параметров в одной кинематической паре. Если в формулу
3n = 2p5
подставить значения n и p5 и она примет вид равенства, то такая система называется статически определимой.
Следовательно, структурная группа может быть принята за расчётную единицу при определении условий в кинематических парах пятого класса.
Применим записанные выше условия к структурной группе второго класса первого вида. Группа состоит из двух звеньев (поводков) и может быть присоединена к двум звеньям, при этом образуются две пары пятого класса (рис. 4.7).
В реальных условиях звенья группы присоединяются не к стойке, а к подвижным звеньям, следовательно, образуется подвижная система, степень свободы которой равна двум. Это значит, что для системы из двух звеньев надо записывать четыре уравнения статики. Если связать движение звеньев 1 и 2 (см. рис. 4.7) с системой координат X–Y, то можно записать два уравнения проекций сил на оси координат и два уравнения моментов относительно точки B.
82
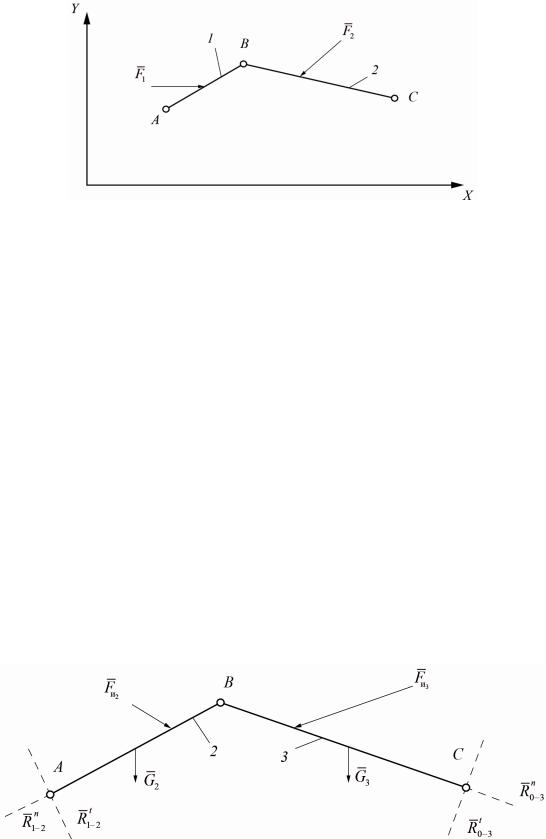
Рис. 4.7. Подвижная схема из двух звеньев
В сумме это даёт четыре уравнения статики. Количество неизвестных также должно быть равным четырём. Примем следующие допущения:
а) для вращательной пары:
–вектор реакции проходит через центр пары, следовательно, известна точка приложения силы;
–величина реакции неизвестна;
–линия действия реакции неизвестна.
б) для поступательной пары:
–точка приложения вектора реакции неизвестна;
–величина реакции неизвестна;
–линия действия нормальна к опорной поверхности.
Сучётом сказанного количество неизвестных параметров в кинематических парах A и C будет равно четырём.
Таким образом, количество уравнений позволяет определить количество неизвестных сил.
На рис. 4.8 приведена расчётная схема для структурной группы второго класса первого вида.
Рис. 4.8. Расчетная схема для структурной группы второго класса первого вида
83
К звеньям группы приложена система внешних сил, которую образуют силы веса и силы инерции. Направление реакции в шарнирах A и C неизвестно, поэтому полные реакции условно разложены по двум направлениям. Одно совпадает с осью звена, второе перпендикулярно ему. Реакцию, линия действия которой совпадает с осью звена, назовём нормальной Rn, а перпендикулярную ей реакцию – тангенциальной Rt. Для того чтобы различать реакции по направлению взаимодействия, будем присваивать им индексы, составленные из номеров звеньев. Первым ставим номер звена, от которого отделено звено группы, вторым – номер отдельного звена (см. рис. 4.8) группы.
Под действием всех приложенных сил группа (кинематическая цепь, имеющая нулевую подвижность) находится в состоянии статического равновесия. Следует отметить, что силовой расчёт для каждого вида групп второго класса имеет свои особенности, определяемые видом пар, которые образуют звенья группы.
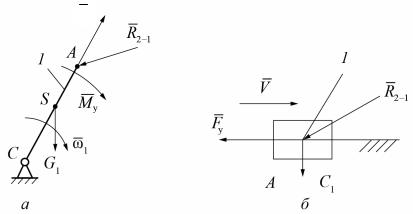
В заключение рассмотрим расчётную схему механизма первого класса. Он представляет собой соединение двух звеньев, одно из которых неподвижно, т.е. является стойкой. На рис. 4.9, а, б представлены две схемы механизмов первого класса: кривошипного и ползунного.
Fи1
Рис. 4.9. Механизмы первого класса: à — кривошипный; á — ползунный
Для обеих схем условие статической определимости не выполняется. Получить уравновешенные системы можно, если приложить к ведущим звеньям силу, которая будет уравновешивать все приложенные к звену силы. Эту силу называют уравновешивающей (Fy). Для нее должны быть заданы точка приложения и линия действия.
Предполагаем, что угловая скорость кривошипа и ползуна постоянны. Если скорости переменны, то на эти звенья действуют сила инерции и момент от сил инерции.
84

4.4. Условия равновесия структурной группы
Условия равновесия структурной группы могут быть записаны в форме векторного уравнения. Согласно рис. 4.8 будем иметь
R1 2 G2 Fи2 Fи3 G3 R0 3 0
или
R1n 2 R1t 2 G2 Fи2 Fи3 G3 R0t 3 R0n 3 0 .
Вычислив тангенциальные составляющие и определив их направления, приведём систему сил к двум неизвестным по величине силам Rn1–2 и Rn0–3. Эти силы могут быть теперь найдены путём построения плана сил по записанному векторному уравнению.
4.5. Порядок силового расчета механизма графоаналитическим методом
1.Определяются все внешние силы, действующие на звенья механизма, и строится расчётная схема для всего механизма.
2.Выделяются структурные группы, для каждой из них строится расчётная схема.
Начинают силовой расчёт обычно с последней по отношению к механизму первого класса структурной группы, для которой имеется достаточно данных, чтобы построить план сил. Далее последовательно переходят к расчёту следующих структурных групп.
3.Заканчивается силовой расчёт определением сил, действующих на ведущее звено.
4.Рассчитывается мощность, развиваемая уравновешивающим моментом в рассматриваемом положении механизма.
5.Определяется полная мощность с учётом коэффициента полезного действия (КПД) механизма. Силовой расчёт одного положения механизма не даёт полной картины изменения сил, действующих на звенья механизма,
поэтому его следует выполнять для нескольких положений механизма. В этом случае можно будет рассчитать среднюю мощность, развиваемую движущей силой на валу ведущего звена, определить в кинематических парах места подвода смазки, чтобы снизить потери энергии на трение, уменьшить износ трущихся поверхностей и т.д.
4.6. Определение уравновешивающей силы методом Н.Е. Жуковского (рычаг Жуковского)
В тех случаях, когда не требуется определять реакции в кинематических парах, уравновешивающую силу можно найти, воспользовавшись принципом возможных перемещений. Согласно этому принципу, если на
85

какую-либо механическую систему действует ряд сил, то прибавив условно к заданным силам силы инерции и дав всей системе возможные для данного положения перемещения, получим ряд элементарных работ, сумма которых должна равняться нулю.
Для системы, обладающей стационарными связями (т.е. связями, не зависящими от времени), возможные перемещения δi совпадают с действительными элементарными перемещениями. Математически это можно выразить в следующем виде:
i n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
F si cos Fi si 0 |
||||||||
i 1 |
|
|
|
|
|
|
|
|
или, разделив на dt, |
|
|
|
|
|
|
|
|
i n |
|
i n |
|
i |
|
|||
i i |
i i |
|
|
N |
0 , |
|||
FV cos |
|
FV |
|
|
|
|||
i 1 |
|
|
|
|
i 1 |
|
|
|
где Fi – задаваемые силы; Vi – скорость точек приложения сил Fi; – угол между вектором силы и вектором скорости точки приложения ( FVi i );
Ni – мощность, развиваемая силой Fi.
Предположим, что в точке C звена AB приложена сила Fi (рис. 4.10). Для дальнейших рассуждений построим повёрнутый план скоростей
(рис. 4.11). Силу Fi переносят со звена AB в точку С плана скоростей. При этом перенесении оставляют без изменения величину и направление силы Fi. Из точки p – полюса плана скоростей, опускают на направление этой силы перпендикуляр hi. Мощность Ni силы Fi может быть выражена следующим образом:
Ni = FVi icos i = Fi pc V cos i = Fihi V .
Рис. 4.10. Силы, действующие |
Рис. 4.11. Повернутый план |
на звено |
скоростей механизма |
Из построения следует, что угол между Fi и hi равен αi для механизма
i=n |
|
i=n |
|
|
i V Fihi = 0 . |
N |
||
i=1 |
|
i=1 |
86

Так как в уравнение входит общий множитель μv, не равный нулю, то после сокращения на него получаем
i=n
Fihi = 0
i=1
или
F1 h1 + F2 h2 +......+ Fn hn = 0.
Уравнение может быть истолковано следующим образом.
Если все заданные силы, действующие на механизм в рассматриваемый момент времени, в том числе и силы инерции, перенести параллельно самим себе в одноимённые точки повёрнутого плана скоростей, то повёрнутый план скоростей можно рассматривать как некоторый рычаг с опорой в полюсе плана скоростей, находящийся под действием всех рассматриваемых сил в равновесии.
Этот метод Жуковского может быть применён для нахождения одной неизвестной силы, если точка приложения и линия действия этой силы заданы. Если на звенья механизма действуют моменты сил инерции, то последние нужно заменить силами с определёнными плечами.
Применим метод Жуковского для нахождения уравновешивающей си-
лы Fy.
Пусть на звенья 2 и 3 механизма, изображённого на рис. 4.12, действуют силы F2 и F3, приложенные в точках C и D.
Рис. 4.12. Схема механизма |
Рис. 4.13. Повернутый план |
|
скоростей механизма |
Силы F2 и F3 представляют собой равнодействующие всех действующих сил на звенья 2 и 3, включая и силы инерции. Очевидно, что в общем случае под действием произвольно выбранных сил механизм не будет находиться в равновесии. Для приведения механизма в равновесие необходи-
87

мо приложить уравновешивающую силу Fy или уравновешивающий момент My. За точку приложения уравновешивающей силы Fy принимают точку А, направляя её перпендикулярно к O1A. Далее строят повёрнутый план скоростей (рис. 4.13) и переносят на него действующие силы. Затем составляют уравнения моментов этих сил относительно полюса p плана скоростей
Fyhy + F2h2 F3h3 = 0,
откуда определяют уравновешивающую силу
Fy = F3h3 hy F2h2 .
88
5. ДИНАМИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
Одна из основных задач динамики машин – изучение истинного закона движения ведущего звена под действием приложенных сил (моментов). Движение ведущего (главного) вала определяет движение остальных звеньев механизма.
В общем случае скорости ведущего звена механизма при установившемся движении являются величинами переменными. Колебания скоростей этого звена внутри одного цикла вызываются в основном двумя факторами:
1)несоответствием между приведенными моментами движущих сил и сил сопротивления;
2)непостоянством приведенного к главному валу момента инерции отдельных механизмов.
Эти колебания вызывают в кинематических парах дополнительные динамические давления, понижающие общий коэффициент полезного действия машины и надежность ее работы. Кроме того, колебания скоростей могут стать причиной значительных упругих колебаний в звеньях механизма, приводящих к дополнительным потерям мощности и к снижению прочности этих звеньев, а также могут ухудшить тот рабочий технологический процесс, который выполняется механизмом.
Колебания скоростей ведущего звена характеризуются коэффициентом неравномерности хода
max min .
ср
Для большинства технических расчетов принимают
|
max min |
или |
n , |
cр |
2 |
ср |
30 |
|
|
где п – число оборотов вала в минуту.
Для каждого типа машин в зависимости от их назначения устанавливают определенный коэффициент неравномерности хода . Например:
для насосов |
0,03...0,02; |
для металлорежущих станков |
0,02...0,05; |
для двигателей внутреннего сгорания |
0,005...0,015. |
В зависимости от причин, нарушающих равновесие между действующими в машине моментами, применяют и соответствующие средства для выравнивания (регулирования) скоростей главного вала.
89

Если периодические колебания скоростей главного вала обусловливаются характером технологического процесса, выполняемого данной машиной, и структурой ее механизмов, а также рабочим процессом самого двигателя, то для уменьшения неравномерности движения машину снабжают маховым колесом (маховиком).
Если изменения скоростей главного вала вызываются причинами, имеющими случайный характер (внезапный сброс нагрузки и др.), то регулирование скорости производят при помощи специальных регуляторов скорости, изменяющих количество энергии, подводимой к машине.
Ниже рассмотрены вопросы расчета маховика, необходимого для обеспечения заданного коэффициента неравномерности хода.
Кинетическая энергия машины постоянно изменяется, что вызывает, в свою очередь, изменение угловой скорости ведущего звена. Так,
T JП2 2 ,
где T – кинетическая энергия машины; JП – приведенный момент инерции
звеньев механизма; ω – угловая скорость ведущего звена в конце рассматриваемого периода.
T Aизб,
здесь T – приращение кинетической энергии машины; Аизб – избыточная работа.
Колебание угловой скорости будет при этом тем меньше (следовательно, меньше будет и коэффициент неравномерности хода δ), чем больше приведенный момент инерции механизма.
Уменьшение периодических колебаний скорости ведущего звена может быть достигнуто за счет увеличения момента инерции машины. Для этого на ведущий вал устанавливается маховик с моментом инерции JM, имеющий форму сплошного диска или шкива со спицами и являющийся аккумулятором кинетической энергии.
Физически роль маховика в машине можно представить следующим образом. Если в пределах некоторого угла поворота ведущего звена механизма работа движущих сил больше работы сил сопротивления, то ведущее звено вращается ускоренно и кинетическая энергия механизма увеличивается. При наличии в машине маховика прирост кинетической энергии распределяется между массами звеньев механизма и массой маховика, а при отсутствии маховика весь прирост кинетической энергии должен быть от-
90