

книги / Управление большими системами. УБС-2017
.pdfИнформационные технологии в управлении техническими системами и технологическими процессами
Таким образом, модель движения будет представлять собой систему уравнений для свободного плоского движения тела на плоскости. Математическая модель состоит из трех уравнений. Это уравнение вращения тела, которое может быть получено как сумма моментов, действующих на тело, а также два уравнения в виде суммы проекции сил на оси:
(1) |
m |
d 2 x(t) |
cos(ϕ (t)) + kтр |
|
dx(t) |
cos(ϕ (t)) = |
|
|||||||||
2 |
|
dt |
|
|||||||||||||
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
= F x cos(ϕ (t)) + F x |
cos(ϕ (t) − α (t)), |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
г1 |
г2 |
|
(2) |
m |
d 2 y(t) |
sin(ϕ (t)) + kтр |
dy(t) |
sin(ϕ (t)) |
= |
|
|||||||||
dt |
2 |
|
|
|
dt |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
= F y sin(ϕ (t)) + F y |
sin(ϕ (t) − α (t)), |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
г1 |
г2 |
|
(3) |
J |
d 2ϕ (t) |
|
+ k |
|
dϕ (t) |
= F |
Lsin(α (t)), |
|
|
||||||
|
|
|
|
|
||||||||||||
|
|
|
dt2 |
|
трJ |
dt |
|
г2 |
|
|
|
|
||||
где Fг1 – сила тяги гусениц первого звена; Fг2 – сила тяги гусениц второго звена, φ(t) – угол поворота транспортера, α(t) – угол складывания звеньев относительно друг друга; J – момент инерции звена; kтр – коэффициент трения звена при прямолинейном движении; m – масса звена; kтрJ – коэффициент трения первого звена при повороте.
3. Схема системы нечеткого управления
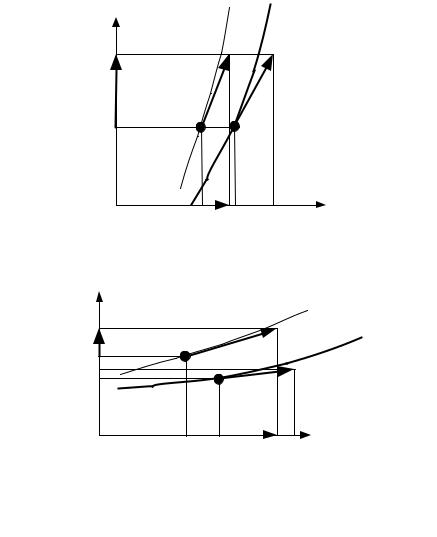
Если обратиться к опыту эксперта-водителя, то коррекцию отклонений он выполняет по одному параметру, по кратчайшему расстоянию между фактическим положением и траекторией движения. Подобным образом коррекцию можно проводить по одной, более удобной, координате положения. Эта та координата, на ось которой вектор скорости проецируется в меньшую величину, чем в случае другой координаты.
Для пояснения способа определения входных параметров в блок принятия решения на рис. 3 и 4 представлены ситуации отклонений транспортера от заданного маршрута. Траектория
243
281
Управление большими системами. Выпуск XX |
|
|
||||||||
движения транспортера задана в виде кривой З, на которой по- |
||||||||||
ложение транспортера определяется координатами (хз(t), хз(t)). |
||||||||||
По заданной кривой можно определить заданную скорость дви- |
||||||||||
жения Vз(t). Отклоняясь, транспортер имеет фактические коор- |
||||||||||
динаты (хф(t), хф(t)) и скорость |
Vф(t). Являясь векторными ве- |
|||||||||
личинами, данные скорости проецируются на оси координат: |
||||||||||
фактическая, как |
Vфх(t) и |
Vфу(t), заданная, как |
Vзх(t) и |
Vзу(t). |
||||||
|
|
|
|
Ф |
|
З |
|
|
||
V |
ф(t) |
|
|
|
|
|
|
|
|
|
|
у |
|
|
|
|
|
|
|
|
|
уф(t) |
|
|
|
|
|
|
|
|
|
|
уэ(t) |
|
|
|
|
|
|
|
|
|
|
|
|
xф(t) |
V |
ф(t) |
x |
(t) |
|
|
|
|
|
|
|
з |
|
|
|
|
|
||
|
|
|
|
x |
|
|
|
|
|
|
Рис. 3. Ситуация, при которой |
V (t) > 0 |
|
||||||||
|
|
|
|
|
|
|
|
Ф |
|
|
V ф(t) |
|
|
|
|
|
|
|
|
З |
|
|
|
|
|
|
|
|
|
|
|
|
у |
|
|
|
|
|
|
|
|
|
|
уф(t) |
|
|
|
|
|
|
|
|
|
|
уэ(t) |
|
|
|
|
|
|
|
|
|
|
|
xф(t) |
xз(t) |
ф |
(t) |
|
|
|
|||
|
|
|
Vx |
|
|
|
|
|||
Рис. 4. Ситуация, при которой |
V (t) < 0 |
|
||||||||
244 |
|
|
|
|
|
|
|
|
|
|
282 |
|
|
|
|
|
|
|
|
|
|

Информационные технологии в управлении техническими системами и технологическими процессами
При этом решение, по какому из перечисленных параметров проводить коррекцию, принимается по знаку параметра, определяемому по выражению
(4) V (t) = Vx (t) − Vу (t) = (Vxэ(t) − Vxф (t)) − (Vуэ(t) − Vуф (t)).
Разности скоростей Vх(t), Vу(t) определяют отличие проекций заданной скорости и фактической скорости на оси. Разность V(t) несет в себе информацию о направлении отклонения и ее величине.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k ос ϕ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k ос ϕ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
β (t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f (t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕ ( t ) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕ( t ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
βп(t ) |
|
βc ( t ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x (t ) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Fг(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(t ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x(t ) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kосп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y(t ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
Pin1 |
|
|
|
|
|
|
|
|
|
|
x(t ) |
|
|
|
|
|
|
|
|
|
|
|
y( t ) |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
Если |
V |
> 0 , тоP in 1 |
= |
|
y , Pin 2 |
= |
y |
|
|
|
|
|
|
|
|
|
x( |
t ) |
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
Pin 2 |
Если |
V |
< 0 , тоP in 1 |
= |
|
x , Pin 2 |
= |
x |
|
|
|
|
|
|
|
|
|
x(t) |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y( t ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ym (t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
xm(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ym(t ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
xm ( t ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 5. Система интеллектуального нечеткого управления
Исходная схема системы управления, представляющая собой объект управления с обратными связями, имеет хорошие динамические свойства. Но при возмущениях траектория моде-
245
283
Управление большими системами. Выпуск XX
ли исходной системы управления отклоняется от заданной. Для разработки системы интеллектуальной логической компенсации возмущений при движении ДГТ предлагается схема, при котором в качестве блока задачи траектории выступает невозмущенная модель движения транспортера (рис. 5).
НМ ОУ – невозмущенная модель объекта управления, НЛ – блок нечеткой логической системы компенсации возмущений; хm(t), ym(t) – координаты транспортера, выдаваемые эталонной невозмущенной моделью; ОУ – объект управления; β(t) – угловое положение рулевого колеса; Fг – сила тяги гусениц; Kосп – коэффициент обратной связи поступательного движения
(см. рис. 5).
Вблок НЛ подается отклонение по одной из координат
иего скорости. Координата определяется по знаку вычислимого параметра V(t). Блок НЛ после логической обработки выдает два параметра коррекции по скорости и отклонению угла рулевого колеса.
4. Анализ эффективности компенсационной системы
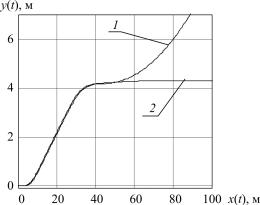
На рис. 6–7 представлены результаты численного расчета математической модели движения ДГТ.
Рис. 6. Траектория движения транспортера при воздействии возмущающих сил
246
284

Информационные технологии в управлении техническими системами и технологическими процессами
Рис. 7. Угловое положение транспортера при воздействии возмущающих сил
Модель рассчитывается совместно с математической моделью привода гидравлического руля, рассмотренного автором в работах [3, 5] и алгоритмом рассматриваемой системы управления.
При этом возмущения выражены в виде ступенчатой, релейной функции. Возмущения появляются после тридцатой секунды моделирования. Возмущения влияют в виде момента, стремящегося увести транспортер от заданной траектории.
Кривые 1 на рис. 6–7 соответствуют возмущенной системе с выключенным контуром управления, а кривые 2 – возмущенной системе с включенным контуром управления.
При воздействии описанных выше сил возмущения водитель компенсирует данное возмущение путем задания некоторого угла складывания между звеньями, который пропорционален величине возмущения. Так, интеллектуальная система управления выполняет компенсацию возмущения дополнительным углом между кинематическими звеньями транспортера (см. рис. 7). Проведенные численные испытания показывают эффективность интеллектуальной системы компенсации возмущений при движении транспортера.
247
285
Управление большими системами. Выпуск XX
Литература
1.ИЛЬЯСОВ Б.Г., ХУСНУТДИНОВ Д.З., ЯРУЛЛИН Ч.А.
Синтез интеллектуальной системы управления движением двухзвенного гусеничного транспортера «Витязь» на основе имитационного моделирования // Международный науч-
ный журнал. – 2016. – № 10 (52). – Ч. 2. – С. 46–53.
2.ИЛЬЯСОВ Б.Г., ХУСНУТДИНОВ Д.З., ЯРУЛЛИН Ч.А.
Метод получения имитационных моделей движения двухзвенных гусеничных транспортеров «Витязь» // Вестн.
УГАТУ. – 2016. – Т. 20, № 1 (71). – С. 20–25.
3.Математическое моделирование мобильного гусеничного робота / С.Ф. ЯЦУН, ЧЖО ПЬО ВЕЙ, А.В. МАЛЬЧИКОВ, Е.С. ТАРАСОВА // Изв. Юго-Запад. гос. ун-та. – 2011. –
№ 1 (34). – С. 10–17.
4.Математическое моделирование рулевого механизма двухзвенного транспортера «Витязь» / А.И. ИЛЬИН,
Т.Р. САЙФЕЕВ, В.А. ЦЕЛИЩЕВ, Д.З. ХУСНУТДИНОВ, Ч.А. ЯРУЛЛИН // Вестник УГАТУ. – 2013. – Т. 17, №1 (54). –
С. 73–78.
5.Сравнительный анализ нелинейностей математической модели рулевого механизма двухзвенного транспортера «Витязь» сгидравлической обратной связью / А.И. ИЛЬИН, Т.Р. САЙ-
ФЕЕВ, А.М. ПУГИН, В.А. ЦЕЛИЩЕВ, Д.З. ХУСНУТДИНОВ, Ч.А. ЯРУЛЛИН // Вестник УГАТУ. – 2013. – Т. 17, № 4 (56). –
С. 167−176; 86–90.
6.ШАРИКОВ Н.В. Моделирование управляемого движения манипулятора // Известия ТулГУ. Технические науки. – 2013. – № 9. – Ч. 1.
248
286
Информационные технологии в управлении техническими системами и технологическими процессами
FUZZY LOGIC SYSTEM OF COMPENSATION OF PERTURBATIONS AT THE MOTION OF THE TWO TRAVELER TRANSPORTER "VITYAZ"
Khusnutdinov Dim Zinfirovich, Post-graduate student of the Department of Technical Cybernetics of GBOU VO UGATU (Ufa, dz_khusnutdinov@mail.ru).
Abstract: A method of intellectual compensation of disturbances during motion of a two traveler transporter "Vityaz" based on fuzzy logic is proposed. The method is checked on the simulation mathematical model of the conveyor movement. Results of numerical model calculation together with fuzzy control algorithm are presented.
Keywords: transporter "Vityaz", fuzzy logic, compensation of disturbances.
249
287

Управление большими системами. Выпуск XX
УДК 021.8 + 025.1 ББК 78.34
РАЗРАБОТКА ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССА ОСТЫВАНИЯ СЛИТКА В УСТАНОВКЕ НЕПРЕРЫВНОЙ РАЗЛИВКИ СТАЛИ (УНРС)
Галкин А.В.1, Тырин Д.Ю.2
(Липецкий государственный технический университет, Липецк)
Пименов В.А.3
(ПАО НЛМК, Липецк)
В данной работе проводится исследование динамики изменения температуры сляба в процессе прохождения им установки непрерывной разливки стали путем моделирования на ЭВМ. Представлены математическая модель остывания слитка в УНРС и реализующее данную модель программное обеспечение с визуализацией температурного поля сляба.
Ключевые слова: установка непрерывной разливки стали, метод конечных элементов, уравнение теплопроводности.
1. Введение
Целью работы является определение оптимальных параметров работы УНРС, позволяющих получить максимальную производительность при минимизации вероятности возникновения дефектов поверхности и внутренней структуры выходного продукта.
1 Александр Васильевич Галкин, кандидат технических наук, доцент
(avgalkin82@mail.ru).
2Дмитрий Юрьевич Тырин, студент (dimedrius@mail.ru).
3Владимир Александрович Пименов, кандидат технических наук, старший научный сотрудник (pimenov_va@nlmk.com).
250
288

Информационные технологии в управлении техническими системами и технологическими процессами
Расчеты основываются на анализе распределения тепла, которое, в свою очередь, описывается уравнениями математической физики, в частности уравнением теплопроводности, являющимся дифференциальным уравнением в частных производных параболического типа. В контексте решения поставленной задачи использовался универсальный абсолютно устойчивый численный метод – метод конечных элементов.
2. Объект исследования
Непрерывная разливка стали прочно утвердилась в практике металлургического производства. Опыт использования нового способа разливки стали привел к кардинальному переустройству сталеплавильного и существенным изменениям прокатного производств по причине очевидных преимуществ, таких как снижение энергозатрат, ускорение затвердевания, сокращение расхода металла на обрези головной и донной частей. Принципиальная схема установки представлена на рис. 1.
Рис. 1. Схема УНРС
251
289
Управление большими системами. Выпуск XX
3. Формализация задачи
3.1. УРАВНЕНИЕ ТЕПЛОПРОВОДНОСТИ
Уравнение теплопроводности, которое описывает процесс остывания слитка в УНРС, представляет собой ДУЧП параболического типа. Уравнение имеет вид
(1)
или
(2)
где
∂T |
= a |
2 |
|
∂ 2T |
||
|
|
|
|
|
2 |
|
∂t |
|
|
|
∂x |
||
|
|
|
|
|||
c(x, y,t)ρ (x, y,t) |
∂T |
= |
∂ |
|||
∂t |
|
|
|
|||
|
|
|||||
|
|
|
∂x |
|||
∂2T
+∂ 2 + q(x, y,t) y
|
T |
|
|
∂ |
|
T |
|
|
k(x) |
∂ |
+ |
k( y) |
∂ |
|
+ f (x, y,t), |
||
|
|
|
|
|||||
|
|
|
||||||
|
∂x |
|
|
∂y |
∂y |
|
||
x, y – координаты в пространстве;
T – вектор распределения температуры (неизвестен); t – дискретное время;
k – коэффициент теплопроводности (Вт/м·°C); c – коэффициент теплоемкости (Дж/°C);
ρ – поверхностная плотность (кг/м3).
Так как уравнение содержит только первую производную по времени, то начальные условия задаются только для искомой функции,
(3) T(x, y, t0) = ϕ(x, y).
В первой краевой задаче на границе области определения задаётся температура или концентрация диффундирующего вещества:
(4)
(5)
(6)
(7)
Во второй краевой задаче на границе задается поток тепла с граничными условиями третьего рода, описывающими конвективный теплообмен:
(8) |
− k |
∂T l |
x |
− k |
∂T l |
y |
= h(T |
f |
− T ), |
|
|
∂x |
|
∂y |
|
|
|||
252 |
|
|
|
|
|
|
|
|
|
290 |
|
|
|
|
|
|
|
|
|