

книги / Теория механизмов и машин сборник задач и тестов
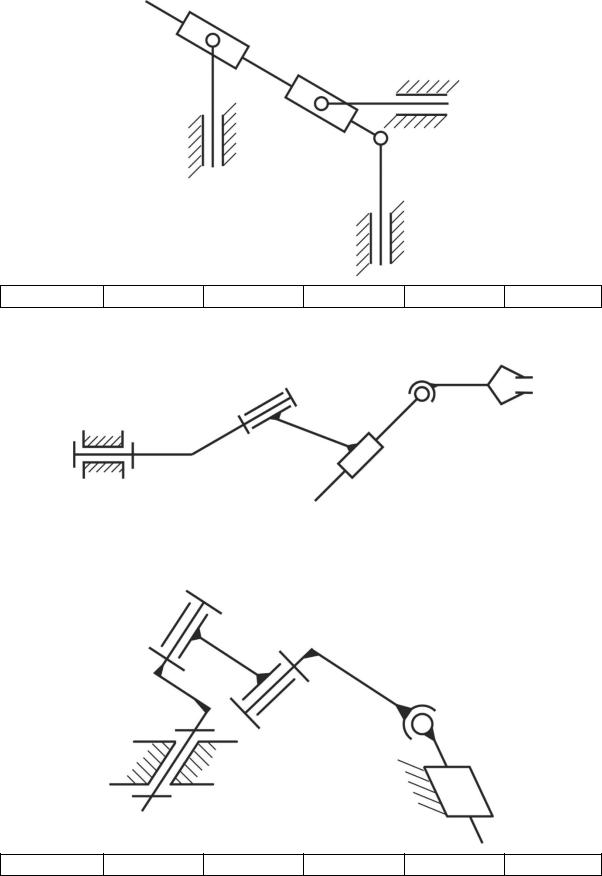
..pdf6) Степень подвижности механизма …
1) 3 |
|
2) 2 |
3) 6 |
4) 4 |
5) 5 |
6) 1 |
|
7) Количество степеней свободы механизма ... |
|
||||
1) 0 |
2) 1 |
3) 3 |
4) 4 |
5) 5 |
6) 6 |
8) Количество степеней свободы механизма манипулятора «Версан-
тран» равно ...
1) 3 |
2) 4 |
3) 5 |
4) 6 |
5) 7 |
6) 8 |
21
9) Подвижность механизма …
1) 3 |
2) 4 |
3) 1 |
4) 5 |
5) 0 |
6) 2 |
10) Количество степеней свободы механизма манипулятора равно ...
1) 3 |
|
2) 4 |
3) 5 |
4) 6 |
5) 7 |
6) 8 |
|
11) Подвижность механизма … |
|
|
|
||
1) 3 |
2) 4 |
3) 5 |
4) 6 |
5) 1 |
6) 2 |
22
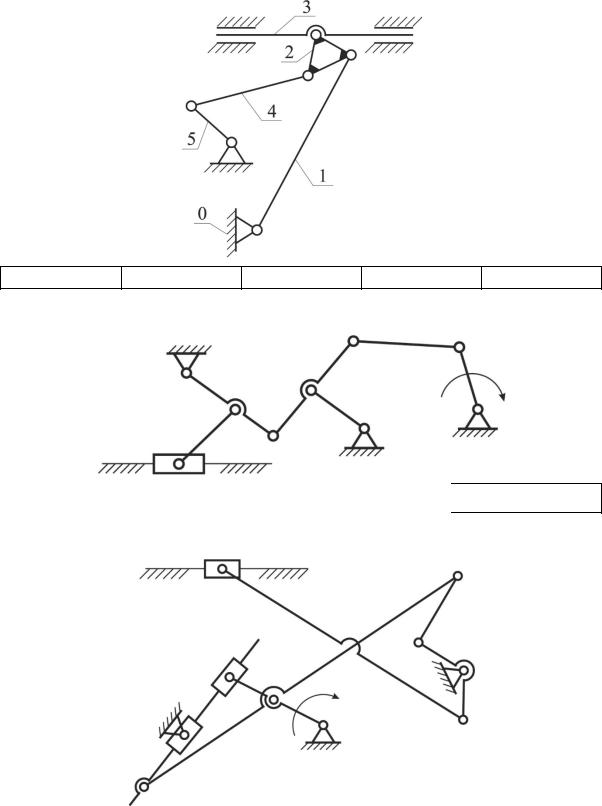
12) Звено … надо сделать начальным, чтобы механизм стал механизмом III класса третьего порядка.
1) 4 |
2) 1 |
3) 5 |
4) 3 |
5) 2 |
13) Формулой строения плоского механизма является ...
1) I → III3 → II |
2 |
2) I → II |
→ II |
2 |
3) |
I → II → III3 |
4) I → II |
→ II |
3 |
|
1 |
|
|
1 |
1 |
|
14) Формулой строения механизма является ...
1) |
I→II |
→II |
→II |
2 |
2) I→III3→II |
→II |
||
|
1 |
2 |
|
|
|
1 |
2 |
|
3) |
I→III3→II |
|
→II |
4) I→II |
→III3 |
→II |
||
|
|
2 |
|
2 |
1 |
|
2 |
|
23
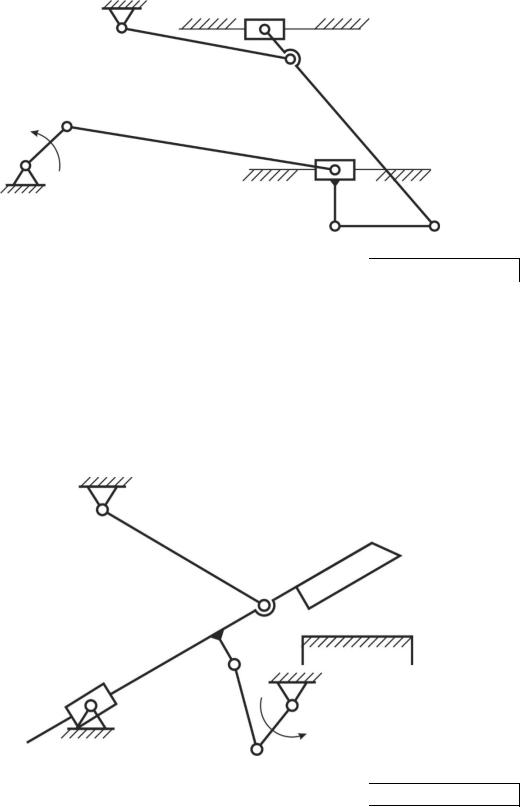
15) Класс механизма …
1) 2-й |
2) 3-й |
3) 4-й |
4) 5-й |
16) Класс механизма механических ножниц…
1) 2-й |
2) 5-й |
3) 4-й |
4) 3-й |
24
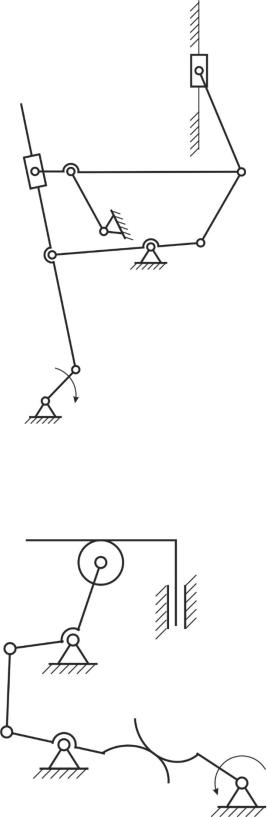
17) Формула строения механизма...
1) |
I→III3→II |
|
→II |
|
2) I→II |
→III3 |
→II |
|
|
|
2 |
1 |
1 |
|
2 |
||
3) |
I→II |
→II |
→II |
→II |
4) I→III3→II |
→II |
||
|
3 |
1 |
|
1 |
2 |
|
1 |
2 |
18) Формула строения механизма …
1) |
I→II1→II1→II5 |
2) |
I→II1 |
→II1→II4 |
3) |
I→III3→II2 |
4) |
I→II1 |
→III3 |
25
2. КИНЕМАТИЧЕСКИЙ АНАЛИЗ РЫЧАЖНЫХ (СТЕРЖНЕВЫХ) МЕХАНИЗМОВ
Обычно считается, что для начального звена в виде кривошипа частота вращения nн = const, а для поступательно движущегося начального звена линейная скорость Vн = const.
2.1.Метод кинематических диаграмм
Стеоретическими предпосылками можно ознакомиться в [5−7].
При решении задач применяются формулы для масштабных коэффициентов.
Для аналогов скоростей и аналогов ускорений
|
|
|
|
|
|
|
|
|
|
μS |
|
|
|
м |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
μVφ = |
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
H μφ |
мм |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
μVφ |
|
|
|
м |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
μaφ = |
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
H μφ |
|
мм |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Для скоростей и ускорений |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
μ |
S |
ω = |
|
|
μ |
S |
|
|
= μVφ ω |
|
м с−1 |
|
|
||||||||
μV |
= |
|
|
|
|
|
|
|
|
|
|
|
; |
|||||||||||
|
H |
μφ |
|
|
H μt |
|
|
мм |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
μa |
= |
|
μ |
V |
|
ω = |
|
|
μ |
V |
|
|
= μaφ |
|
ω |
2 |
|
м с−2 |
|
, |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
H μφ |
|
H μt |
|
|
|
мм |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
где ω − угловая скорость начального звена.
Пример 1
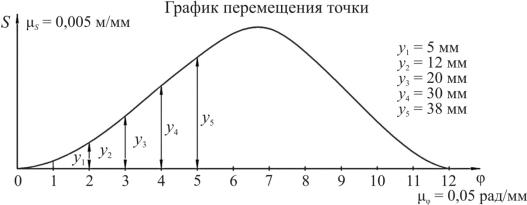
Дано: диаграмма перемещения точки S поступательно движущегося звена (рис. 2.1).
Рис. 2.1. Диаграмма перемещения точки
26
Определить величину перемещения точки из положения 2 в положение 4.
Решение:
S2–4 = μS y4–y2 = 30–12 ·0,005 = 0,09 (м).
Ответ: 0,09 м.
Пример 2
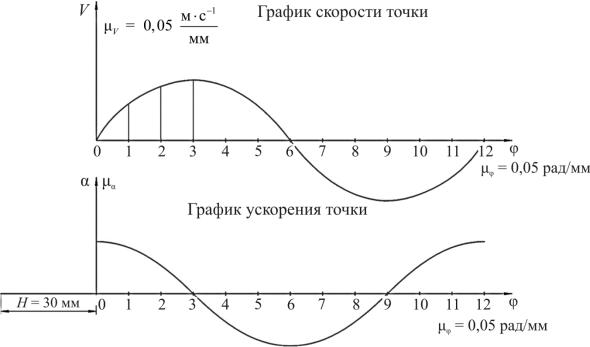
Дано: диаграмма скорости и ускорения точки (рис. 2.2). При ω =
= 12 1с = const.
Рис. 2.2. Диаграмма скорости и ускорения точки
Вычислить масштабный коэффициент μa диаграммы ускорения. Решение:
μa = |
μ ω |
|
0,05 12 |
|
|
м с−2 |
|
||
V |
= |
|
|
= 0,4 |
|
|
. |
||
μϕ H |
0,05 |
30 |
мм |
||||||
|
|
|
|
|
|||||
Ответ: μa = 0,4 мммс−2 .
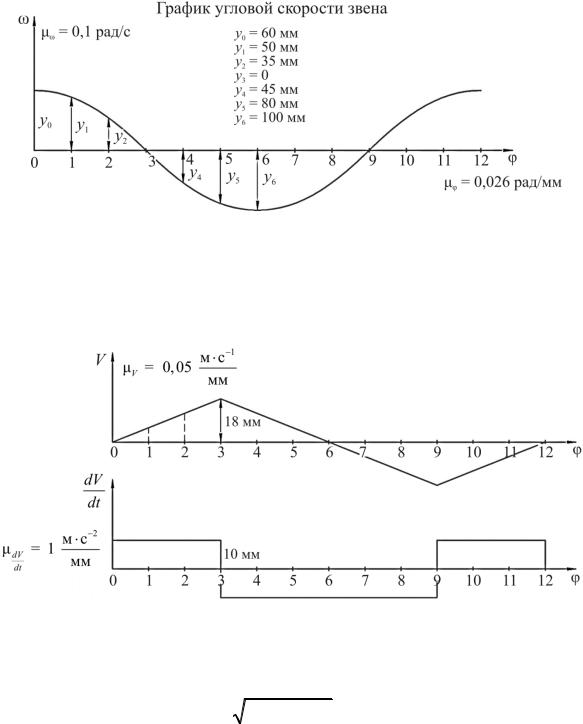
Пример 3
Дано: диаграмма изменения угловой скорости звена (рис. 2.3). Определить разность между угловыми скоростями Δω в 1-м и 5-м по-
ложении.
27
Решение:
Δω = μω ( y1 – y5 ) = 0,1(50 + 80) = 13 1 .
с
Ответ: Δω = 13 1с.
Рис. 2.3. Диаграмма изменения угловой скорости
Пример 4
Дано: длина коромысла lк = 0,1 м.
Рис. 2.4. Диаграмма скорости и тангенциального ускорения конца коромысла
Вычислить ускорение a конца коромысла во 2-м положении (рис. 2.4). Решение:
1) |
Полное ускорение a = |
(aτ)2 +(an )2 ; |
|||||||||
2) |
V |
= |
2 |
V |
= |
2 |
V |
; a |
n |
= |
V 2 |
2 |
|
|
2 |
2 ; |
|||||||
|
V3 |
|
3 |
2 |
|
3 |
3 |
|
|
lk |
|
|
|
|
|
|
|
|
|
||||
28
3) V3 |
= μV y3 = 0,05 18 = 0,9 |
м |
|
n |
= |
2 |
0,9 = 0,6 |
|
м |
; |
|||||||||||||||||
|
a2 |
3 |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
с |
|
||||
|
n |
|
0,62 |
|
м |
τ |
|
|
|
|
|
|
м |
|
|
|
|
||||||||||
4) |
a2 |
= |
|
= 3,6 |
|
|
|
|
|
|
|
; a2 = μa 10 = 10 |
|
|
|
; |
|
|
|
||||||||
0,1 |
|
с |
2 |
|
с |
2 |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
5) |
a2 |
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|||
= |
100 + 12,96 = 10,628 |
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
||||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
м |
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|||
Ответ: a = 10,628 |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
с2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
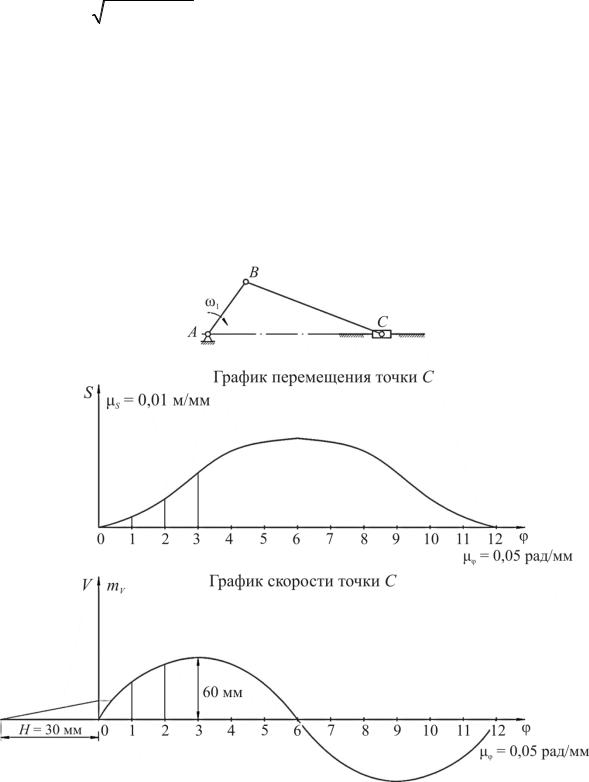
Пример 5 |
|
|
|
|
|
|
|
|
|
|||||
Дано: |
|
диаграммы |
|
перемещения |
и |
скорости точки C (рис. 2.5). |
|||||||||||||||||||||
ω = 40 с–1 |
, V = 4 м в третьем положении. |
|
|
|
|
|
|
|
|
||||||||||||||||||
1 |
|
|
3 |
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вычислить масштабный коэффициент μS диаграммы перемещений.
Рис. 2.5. Диаграммы перемещения и скорости точки C
29

Решение:
1) |
|
|
|
|
μ |
S |
ω |
|
|
|
|
μV |
H μφ |
|
|
|
|
|
|
|
|
|||||||||
μ |
V |
= |
|
|
|
1 |
|
μ |
S |
= |
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|||
|
μ |
|
|
|
|
ω |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
φ |
H |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
||
2) V = μ |
|
|
60 |
μ |
|
|
= |
V |
= |
|
|
4 |
|
= |
1 |
м с−1 |
|
; |
||||||||||||
V |
V |
|
3 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
3 |
|
|
|
|
|
|
|
|
60 |
|
|
60 |
|
|
|
|
|
15 |
мм |
|
|||||||||
|
|
|
|
1 30 0,05 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
3) |
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
||||||||||
μS |
= |
|
|
|
15 40 |
= 0,0025 |
|
|
|
|
|
. |
|
|
|
|
|
|
||||||||||||
|
|
|
мм |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Ответ: μS = 0,0025 ммм .
2.2. Графоаналитический метод (метод планов)
Применяют тогда, когда известна кинематическая схема механизма в данном положении и закон движения начального звена (начальных звеньев).
С помощью векторной алгебры строятся планы скоростей и ускорений. План скоростей (ускорений) – геометрическое место точек, характеризующее по величине и направлению скорости (ускорения) точек звеньев. Точка плана, скорость (ускорение) которой равна нулю, – полюс плана. Все векторы, исходящие из полюса, соответствуют абсолютным скоростям (ускорениям), а векторы, соединяющие промежуточные точки
планов, характеризуют относительные скорости (ускорения).
Векторные уравнения метода планов составляются в порядке присоединения структурных групп к начальному звену (начальным звеньям) и к стойке на основе ряда соотношений и свойств кинематики плоского движения звеньев.
1. В случае простого непоступательного движения звена, которому принадлежат т. A и B (рис. 2.6, а),
|
V |
B = |
V |
A + |
V |
BA; |
|
(2.1) |
|
aB = aA + aBAn + aBAτ |
, |
||||||||
|
|||||||||
где VB, VA и VBA − соответственно векторы абсолютных скоростей т. A и B и относительной скорости т. B в движении вокруг т. A; aB и aA − векторы абсолютных ускорений т. B и A; anBA и aτBA − векторы нормального и тангенциального ускорений т. B относительно т. A.
2. Для звена i, совершающего непоступательное переносное дви-
жение, по которому поступательно перемещается звено j (рис. 2.6, б),
|
|
V |
Ai |
= |
V |
Aj + |
V |
Ai Aj ; |
|
(2.2) |
|
aA |
= |
aA |
+ a kA A |
|
+ aAr |
A , |
|||||
j |
|
||||||||||
i |
j |
|
|
i |
i |
j |
|
||||
30