

книги / Промышленные роботы. Ч. 2
.pdfСенсорные
системы
5-й уровень
4-й уровень
3-й уровень
2-й уровень
1-й уровень
Человек-оператор
Обработка
сенсорной
информации
Модель среды – внешней
и внутренней
Принятие решений
ипланирование
поведения
Адаптивное
управление
Программное управление
Приводы
 Исполнительные Исполнительная системы механическая
Исполнительные Исполнительная системы механическая
система
Внешняя среда
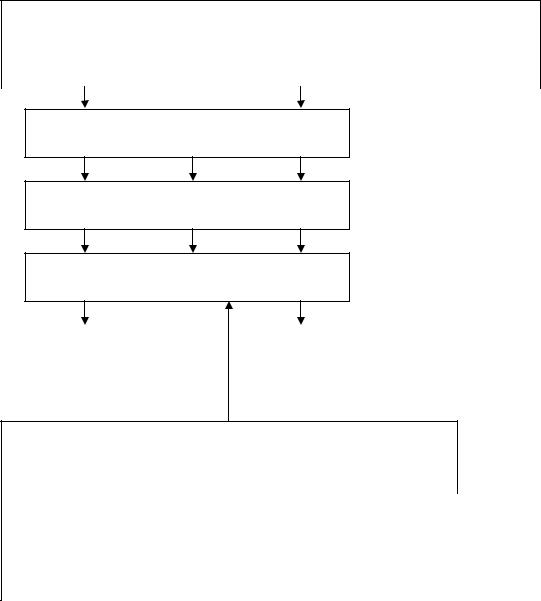
Рис. П. 2.2. Функциональная схема системы управления очувствленным роботом
181
Пульт супервизорного управления
Видеоконтрольное |
Устройство |
Дисплей |
Телетайп |
устройство |
целеуказания |
|
|
|
|
|
|
ЭВМ
Канал связи
Бортовая ЭВМ
Движители аппарата |
|
Приводы |
|
|
манипуляторов |
|
|
|
Устройства очувствления
аппарата |
манипуляторов |
|
|
Датчики перемещения |
Датчики положения |
(линейные и угловые) |
звеньев |
|
|
Измеритель рельефа |
Сенсорные устройства |
|
|
Телекамера |
|
|
|
Рис. П. 2.3. Структурная схема системы супервизорного управления
182
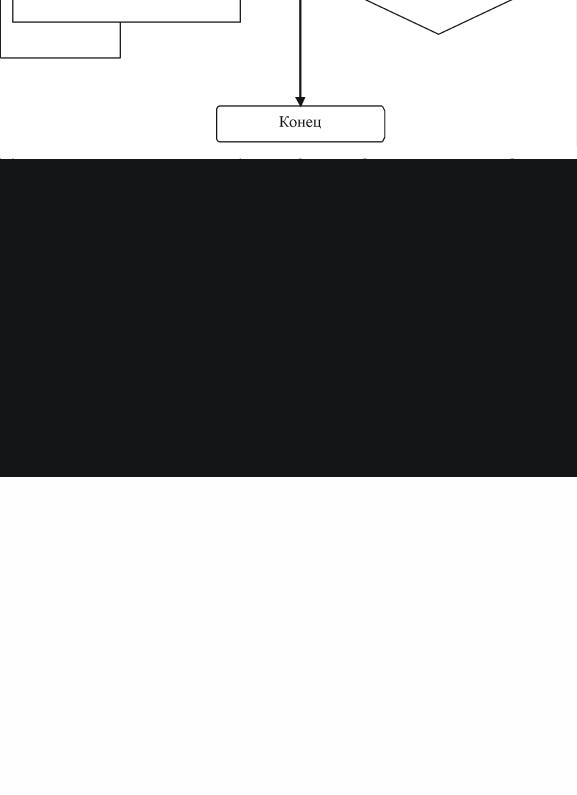
Рис. П. 2.4. Структурная схема алгоритма обслуживания металлорежущих станков
183
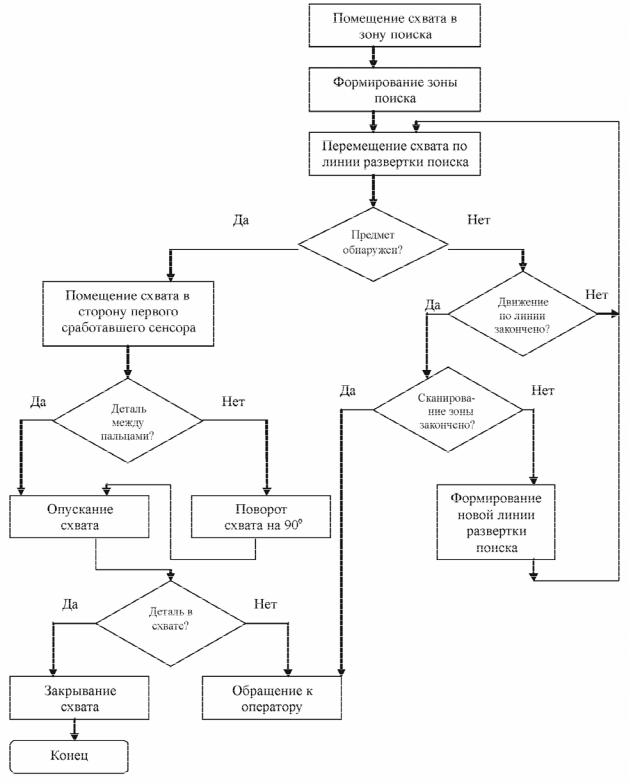
Рис. П. 2.5. Структурная схема алгоритма поиска и взятия предмета
184

Учебное издание
ПОЕЗЖАЕВА Елена Вячеславовна
ПРОМЫШЛЕННЫЕ РОБОТЫ
Часть 2
Учебное пособие
Редактор и корректор Е.В. Копытина
Подписано в печать 10.06.2009. Формат 60×90/8.
Усл. печ. л. 23. Уч.-изд. л. 10,76. Тираж 150 экз. Заказ № 133/2009.
Издательство Пермского государственного технического университета.
Адрес: 614990, г. Пермь, Комсомольский пр., 29, к. 113.
Тел. (342) 219-80-33.