Лабораторная работа № 3. Устройство и кинематика промышленного робота с чпу модели м10п.62.01
Промышленный робот (ПР) с числовым программным управлением модели М10П.62.01 предназначен для автоматизации загрузки – выгрузки деталей и смены инструмента на металлорежущих станках с ЧПУ. Промышленный робот устанавливается на станок, образуя с ним модуль (станок – промышленный робот), который может являться базой для создания гибких производственных систем, предназначенных для продолжительной работы без участия оператора. Управление роботом и станком осуществляется от автономной системы управления.
Основные технические характеристики и устройство пр
Прежде чем рассмотреть технические характеристики конкретного робота, напомним некоторые общие положения о промышленных роботах. Во-первых, ПР делят на 3 типа: роботы 1 типа – программируемые, способные работать по определенной программе, со сменой программоносителя меняются движения исполнительных органов робота; роботы 2 типа – адаптивные, которые имеют датчики обратной связи, обладают "зрением" и способны приспосабливаться, адаптироваться к условиям среды и к её изменениям. И, наконец, роботы 3 типа – интеллектуальные, которые вырабатывают оптимальные варианты решения при задании конечной цели работы. Робот модели М10П.62.01 относится к роботам 1 типа, работающим по жестко заданной программе.
Промышленные роботы должны обеспечивать движение детали, находящейся в рабочем органе – руке по определенной программе, а, следовательно, обеспечить перемещение детали из одной позиции в другую, которые описываются определенными координатами. И вот возможности перемещения механической руки определяется ее структурой, видом и последовательностью расположения входящих в неё кинематических пар. Координаты перемещения руки ПР М10П.62.01 показаны на рис. 5, согласно обозначениям на этом рисунке даются характеристики в табл. Как видно из рис. 1 промышленный робот модели М10П.62.01 работает в сферических координатах, оснащен устройством программного управления с вводом программы с пульта обучения кассеты внешней памяти и от ЭВМ высшего ранга.
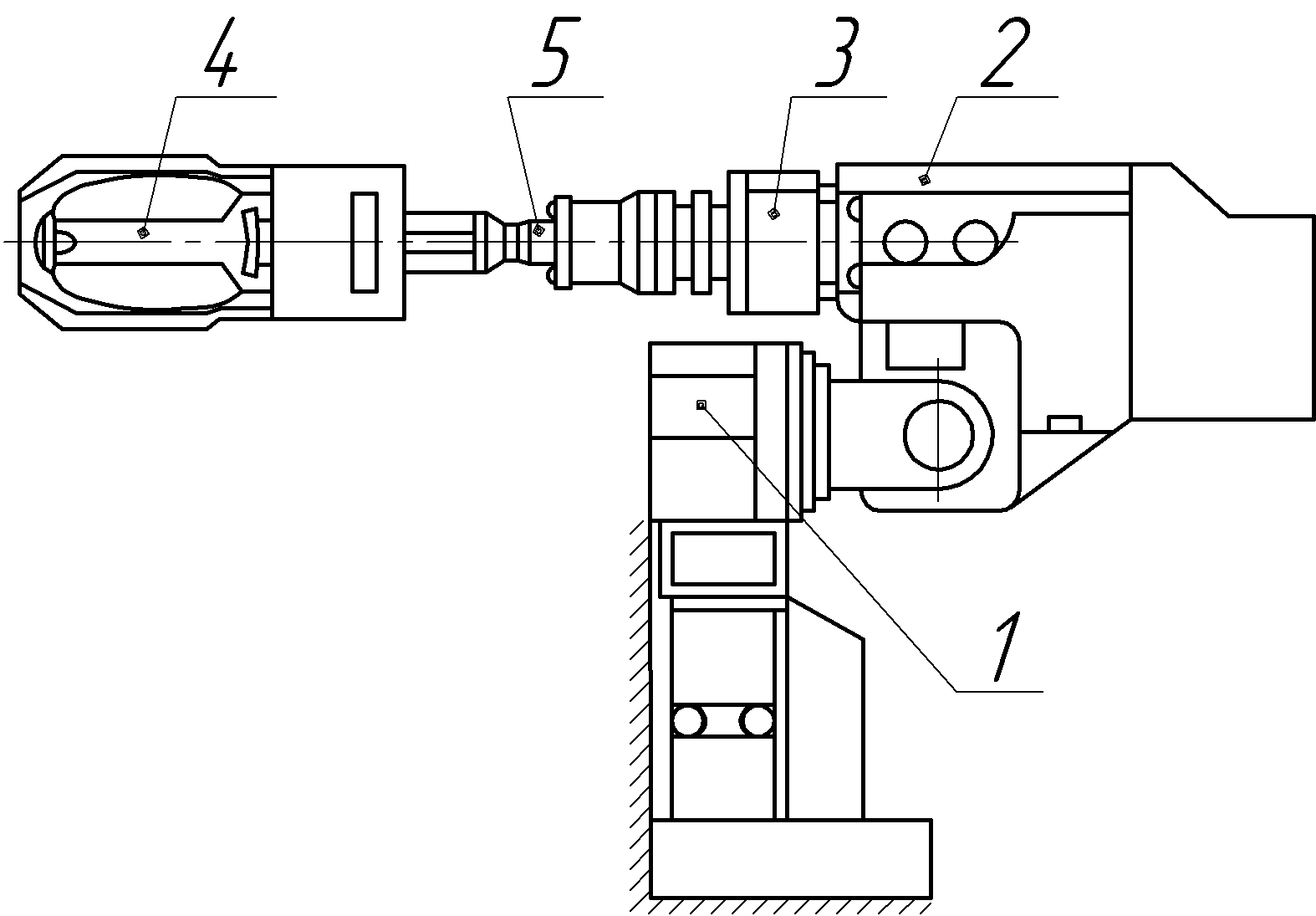
Расположение основных узлов и составных частей робота приведены на рис. 2. Основание 1 робота представляет собой алюминиевую отливку. На основании установлен электродвигатель постоянного тока со встроенным датчиком обратной связи. Механизм поворота и перемещения руки 2 обеспечивает рабочие движения исполнительных органов по координатам Z, Х, А, С. Он состоит из привода перемещения по координатам Z, X, включающий электродвигатель постоянного тока со встроенным датчиком обратной связи, коническую пару с передаточным отношением 1:2, винтовую девятизаходную пару. Для разгрузки винтовой девятизаходной пары слупит шариковая направляющая. Кроме этого входит в механизм поворота и перемещения руки привод перемещений по координатам А, С, состоящий из электродвигателя постоянного тока, червячной пары.
Поворотный блок 3 состоит из привода перемещения по координате , в качестве которого используется неполноворотный пневмодвигатель. Имеется стопорный механизм, обеспечивающий фиксацию поворотного блока в четырех положениях (–90°, 0°, 90°, 180°). Конечные выключатели служат для контроля положения останова.
Механизм захвата 4 предназначен для захвата и удержания детали в процессе перемещения. При их конструировании учитывают форму детали, определяющую конфигурацию губок. Захваты обычно выполняются быстросменными.
Втулка переходная 5 жестко соединяет механизм зажима с блоком поворота.
|
|
|
|
Рис. 1 Координаты перемещения робота: а – движение руки вперед и вниз; б – центральное положение; в – движение руки вниз и в сторону. |
Рис. 2 Общий вид робота |