

1.2.Скорость
 В
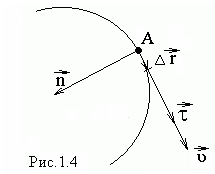
физике под скоростью понимают векторную
величину, характеризующую быстроту
перемещения материальной точки по
траектории и направление движения в
каждый момент времени. Разобьем траекторию
на бесконечно малые участки длины
В
физике под скоростью понимают векторную
величину, характеризующую быстроту
перемещения материальной точки по
траектории и направление движения в
каждый момент времени. Разобьем траекторию
на бесконечно малые участки длины
![]() (рис.1.4), каждому из этих участков
сопоставим бесконечно малое перемещение
(рис.1.4), каждому из этих участков
сопоставим бесконечно малое перемещение![]() .
Разделив это перемещение на соответствующий
промежуток времени
.
Разделив это перемещение на соответствующий
промежуток времени![]() ,
получим мгновенную скорость в данной
точке траектории:
,
получим мгновенную скорость в данной
точке траектории:
![]() .
(1.3)
.
(1.3)
Таким
образом, скорость есть первая производная
радиус-вектора точки по времени.
Перемещение
![]() совпадает с бесконечно малым элементом
траектории, следовательно вектор
совпадает с бесконечно малым элементом
траектории, следовательно вектор![]() направлен
по касательной к траектории ( рис.1.4).
направлен
по касательной к траектории ( рис.1.4).
Разложив вектор скорости по базису системы координат, получаем:
![]() ,
где
,
где
![]() - проекции вектора
- проекции вектора![]() на координатные оси. Модуль вектора
скорости равен
на координатные оси. Модуль вектора
скорости равен![]() .
.
Можно показать, что модуль скорости равен производной пути по времени:
![]()
Движение называется равномерным, если вектор скорости остается постоянным по величине и направлению. В противном случае говорят о переменном движении.
В
соответствии с формулой (1.3), элементарное
перемещение материальной точки
![]() .
Тогда перемещение из положения 1 в
положение 2 (рис.1.2) равно интегралу
.
Тогда перемещение из положения 1 в
положение 2 (рис.1.2) равно интегралу

Пройденный
путь определяется выражением
 .
.
Среднее
значение модуля скорости за время от
![]() до
до![]() равно
равно Средний вектор скорости
Средний вектор скорости .
.
Вектор скорости можно представить в виде
![]() ,
(1.4)
,
(1.4)
где
![]() – модуль скорости,
– модуль скорости,![]() –
орт вектора
–
орт вектора![]() .
Введем орт касательной к траектории
.
Введем орт касательной к траектории![]() ,
условившись направлять его в ту же
сторону, что и
,
условившись направлять его в ту же
сторону, что и![]() .
Тогда, очевидно, орты
.
Тогда, очевидно, орты![]() и
и![]() совпадут, и можно записать
совпадут, и можно записать![]()
Подставив
в выражение (1.3) радиус-вектор в виде
![]() ,
получаем
,
получаем
![]()
 .
.
Для
простоты рассуждений будем считать
траекторию плоской кривой, лежащей в
плоскости
![]() ( рис.1.5). В записанной формуле первая
составляющая вектора скорости
( рис.1.5). В записанной формуле первая
составляющая вектора скорости![]() направлена вдоль радиус-вектора
направлена вдоль радиус-вектора![]() и характеризует быстроту изменения
модуля
и характеризует быстроту изменения
модуля![]() . Вторая составляющая равна
. Вторая составляющая равна![]() и характеризует быстроту изменения
радиус-вектора по направлению.
и характеризует быстроту изменения
радиус-вектора по направлению.
Из
математики известно:
![]() ,
где
,
где![]() – угол между радиус-вектором и осью
– угол между радиус-вектором и осью![]() ,
,![]() – перпендикулярный к радиус-вектору
орт, направленный в сторону возрастания
угла
– перпендикулярный к радиус-вектору
орт, направленный в сторону возрастания
угла![]() .
Подставив
.
Подставив![]() в формулу для
в формулу для![]() , получаем
, получаем
![]() .
.
Таким
образом, составляющая
![]() и
соответствующий орт
и
соответствующий орт![]() связаны с изменением угла
связаны с изменением угла![]() .
.
Очевидно,
что векторы
![]() и
и![]() взаимно перпендикулярны, следовательно
взаимно перпендикулярны, следовательно

1.3.Ускорение
 Быстрота
изменения вектора скорости
Быстрота
изменения вектора скорости
![]() называется ускорением материальной
точки и определяется производной вектора
называется ускорением материальной
точки и определяется производной вектора![]() по времени:
по времени:
![]() .
(1.5)
.
(1.5)
Cпроектируем
это выражение на координатные оси:
![]() .
.
Подставив в формулу (1.5) выражение (1.4), получаем:
![]() .
.
Продифференцировав,
имеем:
![]() .
.
Следовательно, вектор
![]() можно представить в виде суммы двух
взаимно перпендикулярных составляющих
(рис.1.6). Первая направлена по касательной
к траектории и называется тангенциальным
или касательным ускорением
можно представить в виде суммы двух
взаимно перпендикулярных составляющих
(рис.1.6). Первая направлена по касательной
к траектории и называется тангенциальным
или касательным ускорением
![]() .
(1.6)
.
(1.6)
Вторая
составляющая направлена по
![]() ,
т.е. перпендикулярно касательной, по
н
,
т.е. перпендикулярно касательной, по
н ормали
к траектории, и называется нормальным
ускорением
ормали
к траектории, и называется нормальным
ускорением![]() .
.
Исследуем
свойства обеих составляющих, ограничившись
случаем плоского движения. Модуль
тангенциального ускорения, как следует
из (1.6), равен
![]() .
Если
.
Если![]() (скорость растет по величине), вектор
(скорость растет по величине), вектор![]() направлен в ту же сторону, что и
направлен в ту же сторону, что и![]() ( т.е. в ту же сторону, что и
( т.е. в ту же сторону, что и![]() ).
Если
).
Если![]() (скорость со временем уменьшается),
векторы
(скорость со временем уменьшается),
векторы![]() и
и![]() направлены противоположно. При равномерном
движении
направлены противоположно. При равномерном
движении![]() .
.
Нормальное
ускорение определяется величиной
![]() ,
т.е. быстротой изменения во времени
направления касательной к траектории.
Эта быстрота будет тем больше, чем
сильнее искривлена траектория и чем
быстрее перемещается частица по
траектории.
,
т.е. быстротой изменения во времени
направления касательной к траектории.
Эта быстрота будет тем больше, чем
сильнее искривлена траектория и чем
быстрее перемещается частица по
траектории.
Степень искривления плоской кривой характеризуется кривизной С, которая определяется выражением
![]()
где
![]() –угол между касательными к кривой в
точках, отстоящих друг от друга на
расстояние
–угол между касательными к кривой в
точках, отстоящих друг от друга на
расстояние![]() (рис.1.7). Таким образом, кривизна определяет
скорость поворота касательной при
перемещении вдоль кривой. Величина,
обратная кривизнеС,
называется радиусом кривизны
(рис.1.7). Таким образом, кривизна определяет
скорость поворота касательной при
перемещении вдоль кривой. Величина,
обратная кривизнеС,
называется радиусом кривизны
![]() в
данной точке
в
данной точке![]()
Радиус кривизны представляет собой радиус окружности, которая сливается в данном месте с кривой на бесконечно малом ее участке. Центр такой окружности называется центром кривизны для данной точки кривой.
Радиус
и центр кривизны в точке 1 (рис.1.7) определим
следующим образом. Возьмем вблизи точки
1 точку 1.
Построим в этих точках касательные
![]() и
и![]() , перпендикуляры к которым пересекутся
в некоторой точкеО.
При этом для кривой, не являющейся
окружностью, расстояния
, перпендикуляры к которым пересекутся
в некоторой точкеО.
При этом для кривой, не являющейся
окружностью, расстояния
![]()
и
и
![]()
несколько отличаются друг от друга.
Если точку 1
приближать к точке 1, пересечение
перпендикуляров O
будет перемещаться вдоль прямой
несколько отличаются друг от друга.
Если точку 1
приближать к точке 1, пересечение
перпендикуляров O
будет перемещаться вдоль прямой
![]()
и в пределе окажется в некоторой точке
О.
Эта точка и будет центром кривизны для
точки 1. Расстояния R
и R
будут стремиться к общему пределу
и в пределе окажется в некоторой точке
О.
Эта точка и будет центром кривизны для
точки 1. Расстояния R
и R
будут стремиться к общему пределу
![]() ,
равному радиусу кривизны.
,
равному радиусу кривизны.
Как
известно из математики,
![]() (1.7)
(1.7)
Здесь
![]() – орт нормали к траектории, направленный
в сторону поворота вектора
– орт нормали к траектории, направленный
в сторону поворота вектора![]() при движении частицы по траектории.
Величину
при движении частицы по траектории.
Величину![]() можно связать с радиусом кривизны
траектории и скоростью частицы
можно связать с радиусом кривизны
траектории и скоростью частицы![]() .
Из рис. 1.7 следует, что
.
Из рис. 1.7 следует, что![]() где
где![]() - угол поворота вектора
- угол поворота вектора![]() за время
за время![]() (совпадающий с углом между перпендикулярами
(совпадающий с углом между перпендикулярами![]()
и
и
![]() ),
),
![]() - средняя скорость на пути
- средняя скорость на пути![]() .
Отсюда
.
Отсюда![]() .
В пределе при
.
В пределе при![]()
0 приближенное равенство станет строгим,
средняя скорость
0 приближенное равенство станет строгим,
средняя скорость
![]() превратится в мгновенную скорость
превратится в мгновенную скорость![]() в точке 1,
в точке 1,![]() -
в радиус кривизны
-
в радиус кривизны
![]() .
В результате получится равенство
.
В результате получится равенство
![]() (1.8)
(1.8)
- быстрота поворота вектора скорости пропорциональна кривизне траектории и скорости перемещения частицы по траектории.
Подставив
(1.7) в формулу (1.8), получим
![]() ,
тогда нормальное ускорение равно
,
тогда нормальное ускорение равно
![]() .
.
 Вектор
ускорения при движении материальной
точки по плоской кривой равен
Вектор
ускорения при движении материальной
точки по плоской кривой равен
![]() ,
а его модуль
,
а его модуль![]()
При
прямолинейном движении нормальное
ускорение отсутствует. Интересным
является тот факт, что
![]() обращается в ноль в точке перегиба
криволинейной траектории (точка ТП на
рис.1.8). По обе стороны от этой точки
векторы
обращается в ноль в точке перегиба
криволинейной траектории (точка ТП на
рис.1.8). По обе стороны от этой точки
векторы![]() направлены в разные стороны. Вектор
направлены в разные стороны. Вектор![]() не может изменяться скачком, изменение
направления на противоположное происходит
плавно с обращением
не может изменяться скачком, изменение
направления на противоположное происходит
плавно с обращением![]() в ноль в точке перегиба.
в ноль в точке перегиба.
Если
материальная точка движется с постоянными
по величине скоростью и ускорением, то
![]() ,
так что
,
так что![]() и
и![]() ,
поэтому
,
поэтому![]() – частица движется по линии постоянной
кривизны, т.е. по окружности.
– частица движется по линии постоянной
кривизны, т.е. по окружности.