

Министерство образования и науки рф
ФГБОУ ВПО РЫБИНСКИЙ ГОСУДАРСТВЕННЫЙ АВИАЦИОННЫЙ
ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ИМЕНИ П.А. СОЛОВЬЕВА
КАФЕДРА ОБЩЕЙ И ТЕХНИЧЕСКОЙ ФИЗИКИ
|
|
УТВЕРЖДЕНО на заседании методического семинара кафедры ОиТФ « » 2013 г.
Зав.каф. Пиралишвили Ш.А. |
|
|
|
Лаборатория «Физические основы механики»
ЛАБОРАТОРНАЯ РАБОТА №ФМ-1
ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ ТЕЛА
МЕТОДОМ КРУТИЛЬНЫХ КОЛЕБАНИЙ
|
|
Переработано: к.т.н., доцент |
|
|
Каляева Н.А. _________ |
|
|
Рецензент: к.п.н., доцент Попкова Е. А. _________ |
Рыбинск 2013
ТРЕБОВАНИЯ ТЕХНИКИ БЕЗОПАСНОСТИ: необходимо выполнение общих требований безопасности, установленных в лаборатории.
ЦЕЛЬ РАБОТЫ: изучение вращательного движения тела на примере крутильных колебаний. Определение момента инерции твердого тела.
1. Краткие теоретические сведения
Абсолютно твёрдым теломназывается тело, которое ни при каких условиях не может деформироваться, то есть расстояние между двумя точками (или точнее между двумя частицами) этого тела остаётся постоянным.
При вращении твёрдого тела все его точки движутся по окружности, центры которых лежат на одной прямой, называемой осью вращения. Окружности, по которым движутся точки тела, лежат в плоскостях, перпендикулярных к этой оси.
1.1 Кинематика вращательного движения
Рис.
1.1.1
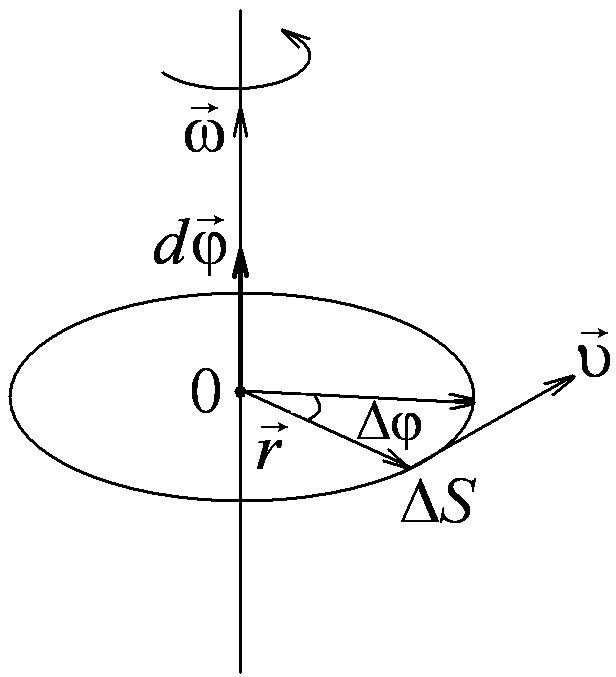
![]() зададим углом
зададим углом![]() .
Элементарные (бесконечно малые) углы
поворота рассматриваются как векторы.
Модуль вектора
.
Элементарные (бесконечно малые) углы
поворота рассматриваются как векторы.
Модуль вектора![]() равен углу поворота, а его направление
определяется поправилу правого винта(рис.1.1.1).
равен углу поворота, а его направление
определяется поправилу правого винта(рис.1.1.1).
Векторы, направления которых связываются с направлением вращения твёрдого тела, называются псевдовекторамиилиаксиальными векторами. Эти векторы не имеют определённых точек приложения: они могут откладываться из любой точки оси вращения.
Быстроту вращения характеризует угловая
скорость. Угловой скоростью
называется векторная величина, равная
первой производной угла поворота тела
по времени:![]()
![]() .
.
Вектор
![]() направлен вдоль оси вращения в соответствии
с правилом правого винта, т.е. так же,
как и вектор
направлен вдоль оси вращения в соответствии
с правилом правого винта, т.е. так же,
как и вектор![]() (рис. 1.1.1). Единицей угловой скорости
служит радиан в секунду (рад/с).
(рис. 1.1.1). Единицей угловой скорости
служит радиан в секунду (рад/с).
Величина линейная скорости точки (рис. 1.1.1):
![]()
 .
.
Направлена
линейная скорость
![]() по касательной к траектории.
по касательной к траектории.
В векторном
виде формулу для линейной скорости
можно написать как векторное произведение
угловой скорости
![]() и радиус-вектора
и радиус-вектора![]() ,
проведённого из центра окружности в
рассматриваемую точку (рис.1.1.1):
,
проведённого из центра окружности в
рассматриваемую точку (рис.1.1.1):
![]()
Если
![]() ,
то вращение называется равномерным и
его можно характеризоватьпериодом
вращения
,
то вращение называется равномерным и
его можно характеризоватьпериодом
вращения![]() –
временем, за которое точка совершает
один полный оборот, т.е. поворачивается
на угол
–
временем, за которое точка совершает
один полный оборот, т.е. поворачивается
на угол![]() .
Так как промежутку времени
.
Так как промежутку времени![]() соответствует
угол
соответствует
угол![]() ,
то
,
то
![]() ,
откуда
,
откуда![]() .
.
Число полных оборотов, совершаемых телом при равномерном его движении по окружности в единицу времени, называется частотой вращения:
![]() ,
откуда
,
откуда![]() .
.
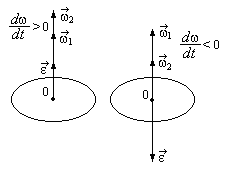
Быстроту изменения угловой скорости характеризует угловое ускорение – векторная величина, равная первой производной угловой скорости по времени или второй производной от угла поворота по времени:
![]()
Рис.
1.1.2
 .
.
При вращении
тела вокруг неподвижной оси вектор
углового ускорения направлен вдоль оси
вращения в сторону вектора элементарного
приращения угловой скорости. При
ускоренном движении вектор
![]() сонаправлен вектору
сонаправлен вектору![]() ,
при замедленном – противонаправлен
ему (рис. 1.1.2).
,
при замедленном – противонаправлен
ему (рис. 1.1.2).
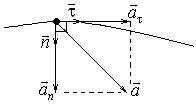
Ускорение
![]() производной точки твердого тела,
вращающегося вокруг неподвижной точки
О или неподвижной оси, проходящей через
эту точку, называютлинейным ускорением.
Оно равно:
производной точки твердого тела,
вращающегося вокруг неподвижной точки
О или неподвижной оси, проходящей через
эту точку, называютлинейным ускорением.
Оно равно:
![]()
где
 нормальное или центростремительное
ускорение;
нормальное или центростремительное
ускорение;![]() - касательное или тангенциальное
ускорение. Здесь
- касательное или тангенциальное
ускорение. Здесь![]() -
единичный вектор, направленный по
нормали в данной точке траектории;
-
единичный вектор, направленный по
нормали в данной точке траектории;![]() -
единичный вектор, направленный по
касательной к траектории в направлении
скорости
-
единичный вектор, направленный по
касательной к траектории в направлении
скорости![]() точки (рис.1.1.3).
точки (рис.1.1.3).
Рис.
1.1.3
![]() характеризует быстроту изменения
направления вектора скорости точки,
оно направленно по нормали к траектории
к центру кривизны. Величина нормального
ускорения
характеризует быстроту изменения
направления вектора скорости точки,
оно направленно по нормали к траектории
к центру кривизны. Величина нормального
ускорения ,
где
,
где
![]() - радиус кривизны траектории в данной
точке.
- радиус кривизны траектории в данной
точке.
Касательное
ускорение
![]() характеризует быстроту изменения модуля
скорости, оно направленно по касательной
к траектории. Векторы
характеризует быстроту изменения модуля
скорости, оно направленно по касательной
к траектории. Векторы![]() и
и![]() совпадают по направлению, т.е
совпадают по направлению, т.е![]() >0,
при ускоренном движении точки; векторы
>0,
при ускоренном движении точки; векторы![]() и
и![]() взаимно противоположны по направлению,
т.е
взаимно противоположны по направлению,
т.е![]() <0
при замедленном движении точки, и
<0
при замедленном движении точки, и![]() при ее равномерном движении. Величина
касательного ускорения
при ее равномерном движении. Величина
касательного ускорения
Учитывая, что
векторы
![]() и
и![]() взаимно перпендикулярны, величина
полного линейного ускорения
взаимно перпендикулярны, величина
полного линейного ускорения![]() будет
определяться по теореме Пифагора:
будет
определяться по теореме Пифагора:
 .
.
Таким образом, связь между линейными
(длина пути S, пройденного
точкой по дуге окружности радиуса
![]() ;
линейная скорость
;
линейная скорость
![]() ;
тангенциальное ускорение
;
тангенциальное ускорение![]() ;
нормальное ускорение
;
нормальное ускорение![]() )
и угловыми величинами (угол поворота
)
и угловыми величинами (угол поворота![]() ,
угловая скорость
,
угловая скорость![]() ,
угловое ускорение
,
угловое ускорение![]() )
выражается следующими формулами:
)
выражается следующими формулами:
![]() ,
,![]() ,
,![]() ,
,![]() .
.
В случае
равнопеременного движения точки по
окружности (![]() ):
):
![]() ;
;![]() ,
,
где
![]() – начальная угловая скорость; знак «+»
соответствует равноускоренному
вращательному движению, знак «–» –
равнозамедленному вращательному
движению.
– начальная угловая скорость; знак «+»
соответствует равноускоренному
вращательному движению, знак «–» –
равнозамедленному вращательному
движению.