

Законы управления форсированными режимами
Они строятся так, чтобы одним из управляющих воздействий задавать степень форсирования, а второе управляющее воздействие использовать для стабилизации режима работы основного контура. Обычно первое это Gт.ф., а второе Fс = var.
В законе управления ФР предусматривается коррекция:
Gт.ф./
Рк = f
(![]() ,
Твх,m)
,
Твх,m)
Коррекция необходима для компенсации изменения степени двухконтурности «m».
Особенности согласования Gт.ф. и Fс для ДТРДФ при включении ФР
В
ДТРДФ с камерой смешения работа ФК
существенно влияет на режим работы
вентилятора. Смешение холодного воздуха
из наружного контура с газом, выходящим
из турбины, приводит из-за воспламенения
топлива при пониженных температурах к
ухудшению условий горения по сравнению
с одноконтурным ТРДФ. Все это требует
строгого согласования значений Gт.ф
и площади критического сечения реактивного
сопла Fс,
а также исключения больших скачкообразных
изменений Gт
в процессе запуска ФК и при подключении
отдельных топливных коллекторов.
Требуется также выполнять направленное
регулирование Fс
при самопроизвольном погасании топливного
факела в ФК. Для ДТРДФ предварительное
увеличение Fс
на 10% по сравнению с максимальным
нефорсированным режимом позволяет
выполнить запуск ФК при сохранении
исходных запасов ГДУ вентилятора или
увеличить Gт.ф.зап.
до 27% при допустимом снижении запасов
ГДУ вентилятора. Более существенное
предварительное увеличение Fс
до 25% позволяет уменьшить использование
располагаемых запасов ГДУв. Увеличение
Fc
более чем на 25% является неэффективным
так как приводит к снижению первоначального
значения запасов ГДУв в результате
влияния величины скольжения роторов
на запасы ГДУ. При управлении установившимися
форсажными режимами в ДТРДФ изменяемая
площадь сопла используется для поддержания
заданной линии рабочих режимов на
характеристике вентилятора с помощью
замкнутого контура регулирования. В
этом случае при нарушении процесса
горения в ФК будет уменьшаться площадь
сопла, это приведет к снижению запасов
ГДУв при последующем восстановлении
процесса горения. С целью защиты
вентилятора от таких возмущений, а также
для предохранения вентилятора от
увеличения оборотов выше допустимой
величины при самопроизвольном погасании
ФК управление соплом следует выполнять
по программно-замкнутой схеме: Fс=f![]() .
.
Такое регулирование и управление повышает устойчивость системы регули-рования ДТРДФ на форсированных режимах, позволяет большее быстродействие сопла на режимах включения ФК.
Влияние заполнения коллекторов форсажного топлива на процесс включения ФР
При
подключении топливных коллекторов
могут происходить резкие провалы тяги
на время заполнения коллектора. После
заполнения коллектора тяга существенно
увеличивается до соответствующего
практически стационарного значения.
Моменты подключения коллекторов
сопровождаются падением запасов ГДУ,
но в момент снижения расхода топлива в
ФК значение
![]() увеличивается по сравнению с программным
значением из-за работы программного
регулятора, увеличивающего площадь
сопла то есть смещающего рабочую точку
на характеристике вентилятора в сторону
увеличения запасов устойчивости.
увеличивается по сравнению с программным
значением из-за работы программного
регулятора, увеличивающего площадь
сопла то есть смещающего рабочую точку
на характеристике вентилятора в сторону
увеличения запасов устойчивости.
Нужна система предварительного заполнения коллекторов с задержкой начала розжига т.е. клапанов подключения и заполнения коллекторов, что по-зволит получить практически моментальный процесс нарастания тяги. В реаль-ных системах может наблюдаться некоторое рассогласование в срабатывании клапана подключения и заполнения, но происходящие броски по тяге и запасам ГДУ имеют допустимые величины.
Особенности включения ФР на максимальном режиме
При включении ФР в случае, когда двигатель работает на максимальном режиме, Gт.ф. min ограничивается требованиями надежного распыла и розжига пламени. Эта величина изменяется в зависимости от условий полета. Наибольшее потребное значение Gт.ф. min необходимо на больших скоростях и малых высотах полета так как на этих режимах существует максимальное противодавление на форсунках. С ростом высоты полета повышается плавность протекания процесса изменения тяги двигателя.
Особенности включения ФР на пониженном режиме работы двигателяПроцесс выполняется условно в три этапа:
- выполняется основная приемистость до некоторого значения приведенной частоты вращения турбокомпрессора;
- производится заполнение форсажным топливом первого коллектора и далее подача в ФК минимального расхода форсажного топлива, продолжение увеличения оборотов турбокомпрессора, при этом вентилятор раздросселирован и имеет повышенные значения запасов ГДУ;
- завершение основной приемистости, обороты турбокомпрессора постоянны, выполняется подключение второго и т.д. коллектора, увеличивается Gт.ф., увеличивается Fс.
Особенности процессов в двигателе при погасании ФК.
- скачкообразное прекращение подачи топлива в ФК путем перемещения РУД в положение безфорсажного режима;
- некоторое увеличение оборотов вентилятора с восстановлением под действием ограничителя частоты вращения;
- резкое уменьшение тяги ( ниже ее значения на безфорсажном режиме) с восстановлением до безфорсажного уровня.
При погасании ФК на больших скоростях полета отклонение оборотов и тяги двигателя от заданных увеличиваются причем за счет изменения скольжения роторов вентилятора и турбокомпрессора существенно снижаются запасы ГДУ компрессора. На характер переходных процессов при погасании ФК существенно влияет быстродействие привода, изменяющего Fс.
Лекция 6
ЛИНЕЙНАЯ ДИНАМИКА ГТД
Для описания динамических свойств ГТД в окрестности установившихся режимов из математического аппарата используются:
- линейные диф. уравнения для исследования переходных процессов в двигателе и системе при различных возмущениях, определения границы устойчивости и показателей качества переходных процессов в САУ;
- передаточные функции для использования при синтезе и анализе многоконтурных систем управления;
- частотные характеристики объекта управления–двигателя для использования в тех же целях, что и передаточные функции.
Особенности динамических свойств ДТРДФ
Для определения особенностей динамических свойств ДТРДФ как объекта
управления можно рассматривать линейные уравнения движения двигателя в следующем виде:
(τ![]() p+ 1) Δn
p+ 1) Δn![]() = Кn1Gт
ΔGт
+ Кn1n2
Δn2
+ Кn1F
ΔFэкв
;
= Кn1Gт
ΔGт
+ Кn1n2
Δn2
+ Кn1F
ΔFэкв
;
(τ![]() р
+ 1) Δn
р
+ 1) Δn![]() =
Кn2
Gт
ΔGт
+ Кn2n1
Δn1+
Кn2F
ΔFэкв;
=
Кn2
Gт
ΔGт
+ Кn2n1
Δn1+
Кn2F
ΔFэкв;
Δх![]() =Kxin1Δn1+Kxin2Δn2+KxiGтΔGт+KxiFΔFэкв.
=Kxin1Δn1+Kxin2Δn2+KxiGтΔGт+KxiFΔFэкв.
Здесь n1, n2– частоты вращения соответственно роторов низкого и высокого давлений;Fэкв– эквивалентная площадь сопла; хi– параметры рабочего процесса двигателя: рi, Тi и др.
Динамика КВД характеризуется тем, что при изменении оборотов КНД из-меняются параметры как на входе в газогенератор так и на выходе из него, а воздействие на сопло передается на газогенератор не непосредственно, а через параметры турбовентилятора.
Динамика КНД характеризуется сильной газодинамической связью между роторами, что и является как бы источником энергии для КНД.
Динамика Ркв основном определяется динамикой ротора КВД.
Динамика параметра Ртхарактеризуется инерционностью в изменении, которая определяется постоянной времени ротора КВД, а эффект форсирования меньший, чем для Рк.
Динамика параметра Ттсоответствует одновальному ГТД, эффект форсирования существенен, а переходный процесс изменения ΔТтпри скачкообразном измененииGтвсегда имеет “перерегулирование”. При измененииFэквпроцессы близки к аналогичным процессам для Рт.
Динамика Gвчерез двигатель в основном определяется инерционностью роторов из-за малого вклада теплового сопротивления КС по сравнению с перепадами степеней повышения давления в КНД и КВД и расположения напорных ветвей характеристик компрессоров, которые близки к вертикальным линиям. Температура газа вдоль проточной части резко уменьшается при уменьшении расхода топлива в начале процесса, а затем увеличивается из-за уменьшения расхода воздуха вызванного уменьшением частоты вращения роторов.
ЛИНЕАРИЗАЦИЯ – аппроксимация (приближенное выражение каких-либо величин через другие, более простые величины) в малом сложной функциональной зависимости простейшей зависимостью, задаваемой линейными функциями; метод исследования нелинейной системы автоматического регулирования, при котором нелинейная система заменяется ее линейной моделью в некотором смысле ей эквивалентной.
Динамика процесса на форсированном и максимальном нефорсированном режимах.
Динамика процессов на этих режимах близка и потому рассматриваются факторы, одинаково влияющие на изменение параметров рабочего процесса.
Изменение углов установки НА компрессора.
Изменяет характеристику компрессора так как степень повышения давления есть функция от приведенных оборотов и приведенного расхода воздуха.
- при изменении угла установки ВНА
в сторону прикрытия приводит к резкому падению расхода воздуха, что вызывает рост температуры газа и рост частоты вращения и влечет компенсацию первоначального падения расхода воздуха.
- при изменении угла установки НА в сторону прикрытия происходит уменьшение Рки расход воздуха перераспределяется между контурами.
Влияние угла установки ВНА на Ркпрактически в 2 раза больше, чем НА.
Увеличение Твх.
В первый момент приводит к изменению положения рабочей точки на характеристике вентилятора, уменьшается расход воздуха. При неизменном расходе топлива растет температура газа, что приводит к росту оборотов и как следствие к росту расхода воздуха. Диапазон линейности изменения параметров двигателя составляет 15…20% Твх.ном.для всех параметров кроме тяги, для которой он существенно меньше.
Скачкообразное увеличение Рвх в двигатель.
Приводит к росту Gв, что при прежнем значении расхода топлива вызывает снижение Тг и торможение роторов. Диапазон по Рвх на крейсерском режиме полета достаточно велик (до 30% Рвх.р ).
Лекция 7
Частотные характеристики ДТРД
Рассматриваются: ТРДФ двухвальный, ДТРДФ двухвальный, ДТРДФ трехвальный.
Для них :
амплитудно - частотная характеристика (АЧХ) и фазо - частотная характеристика (ФЧХ) по расходу топлива в основную камеру сгорания на максимальном режиме в стендовых условиях (Н=0, М=0) для частоты вращения вентилятора близки к характеристикам апериодического звена ( отсутствует резонирование, усиление колебаний, отсутствуют колебания после снятия внешнего колебательного воздействия), полоса пропускания (диапазон частот, в котором при колебаниях расхода подаваемого топлива происходят колебания параметров двигателя) лежит в диапазоне частот 0,38…0,85 Гц. Причем, для трехвальных двигателей полоса пропускания более широкая, чем для двухвальных.
Принимаем τn – частота пропускания,fn= 1/2πτn – частота АФЧХ, φ(f) – амплитуда. В этом случае установлено, что величина частоты пропускания увеличивается при увеличении размерности двигателя, при увеличении расхода воздуха через двигатель. Частота пропускания для частоты вращения КВД как правило меньше, чем для частоты вращения КНД. Это связано с зависимостью частоты пропускания от размерности (момент инерции) ротора, моментной характеристики турбины (мощности).
- частотные характеристики по Рк (давлению воздуха на входе в камеру сгорания) для рассматриваемых двигателей близки и в них обычно выделяют:
а) низкочастотную (до 1,0…1,5 Гц) с наблюдаемым интенсивным уменьшением амплитуды ΔРк/ΔGтдо 0,5…0,6, сопровождаемым изменением фазы до - 30˚…- 40˚;
б) высокочастотную (выше 2 Гц) с медленным уменьшением амплитуды и фазы из-за того, что роторы турбокомпрессоров фильтруют управляющее воздействие и изменение Ркзависит в основном от динамических свойств проточной части двигателя.
Динамические свойства двигателей по Тг характеризуются наличием форсирования в диапазоне 4…8 Гц. Максимальное значение амплитуды ΔТг/ΔGт достигает 1,2…1,4. Причем фаза частотной характеристики доf=1…2 Гц практически не изменяется или имеет положительное значение. Такое протекание АФЧХ объясняется малым значением инерционности для процесса сгорания топлива и достаточно малым запаздыванием процесса горения , взаимное влияние которых проявляется на высоких частотах.
АЧХ двигателей по тяге аналогичны характеристикам ΔРк/ΔGт, а ФЧХ соответствует плавному увеличению отставания фазы ΔРк относительно фазы ΔGт, что объясняется совместным влияниемGв (Рк) и Тг на тягу двигателя.
Изменение динамических свойств двигателей при изменении режима работы и условий полета.
При оценке характеристик двигателей и их узлов обычно пользуются не физическими параметрами, а некоторыми комплексами параметров, учитывающими изменения параметров потока на входе в двигатель. Использование таких комплексов позволяет компактно изображать характеристики лопаточных машин. Например, если характеристику компрессора попытаться изобразить относительно давления на выходе Рк (Gв), понадобится для каждого значения Рвх своя кривая. Использование отношения πк = Рк/Рвх позволяет изобразить πк =f(Gв) на одном графике.
Поэтому характеристики лопаточных машин строят для относительных комплексов, которые составляют на основе теории подобия. Лучше это делать в относительных параметрах:
Рi/
Рвх; Тi/ Твх;![]() ;
;![]() ;
;![]() ;
;
а также используя приведенные значения:
![]()
![]() ;
;![]() ;
;![]() и др.
и др.
связь между приведенными параметрами однозначна.
Для определения постоянной времени двигателя и коэффициента усиления по расходу топлива при изменении условий полета используется положение теории подобия, согласно которому каждому значению Мп и приведенной частоте вращения роторов соответствует определенный режим работы двигателя (если зависимость параметров процесса от числа Rе не учитывается).
Таким образом дроссельные характеристики двигателя в приведенных пара-
метрах справедливы для любых условий полета.
С увеличением высоты полета при неизменной скорости на подобных режимах работы величина коэффициента усиления по расходу топлива увеличивается, а при увеличении скорости полета происходит его уменьшение.
При учете числа Rе дроссельные характеристики двигателя расслаиваются по скорости и высоте полета и в этом случае для определения изменения постоянной времени по скорости и высоте необходимо вводить понятие приведенного времени:
tпр=t![]()
Постоянная времени для реальных переходных процессов определяется как:
ТД.
Н,М =Тдо![]() ,
,
где : Тдо– постоянная времени для Н=0, М=0;
ТД, Н, М – постоянная времени для заданных Н и М полета.
При снижении режима работы и увеличении высоты полета двигатель становится более инерционным.
Частотные свойства двигателя существенно зависят от амплитуды возмущающего воздействия по Fс, диапазон линейности составляет не более
ΔFс = ±2%Fсмакс.
Лекция 8
Динамические процессы в ГТД в нештатных ситуациях.
К нештатным ситуациямотносятся ситуации, возникающие при повреждениях элементов двигателя и САУ. Как правило, анализируются результаты повреждений не приводящие к катастрофически быстрому изменению режима работы двигателя.
Динамические процессы в нештатных ситуациях, развивающиеся в двигателе, могут быть использованы в диагностических целях для распознавания самих нештатных ситуаций, для разработки принципов построения распознавания и парирования отказов.
Нештатные ситуации и вызванные ими нестационарные процессы условно для удобства анализа разделяются на тригруппы:
1 – процессы при повреждениях элементов непосредственно самого двигателя и его коммуникаций (топливных, воздушных и др.);
2 – процессы в двигателе при повреждении элементов автоматики двигателя,
агрегатов и коммуникаций;
3 – процессы в двигателе при повреждении датчиков измерения параметров рабочего процесса двигателя, используемых в программах регулирования.
Прогар соплового аппарата турбины высокого давления:
на 10% - не приводит к снижению тяги (мощности) двигателя так как парируется повышением расхода подаваемого в камеру сгорания топлива;
дальнейшее увеличение прогара приводит к снижению частоты враще-ния и, следовательно, к снижению тяги (мощности) двигателя.
Разрушение корпуса камеры сгорания из-за прогара или попадания посторон-них предметов:
Это приводит к снижению запасов ГДУ вентилятора из-за перетока горячих газов в наружный контур с возможной кратковременной потерей устойчивости вентилятора, снижению расхода воздуха и повышению Тг, следовательно к снижению подаваемого расхода топлива, снижению всех параметров в том числе и тяги (мощности) двигателя.
Погасание основной и форсажной камер сгорания.
Погасание основной камеры сгорания наиболее опасно при полете у земли с большой скоростью. Сопровождается снижением тяги (мощности) двигателя за очень короткое время примерно в среднем за 0,3…0,5 сек., но при возможности повторного розжига время восстановления режима определяется быстродействием системы повторного розжига.
Погасание форсажной камеры приводит к резкому падению давления за ТНД и следовательно увеличению частоты вращения вентилятора, а при превышении допустимых оборотов поступает сигнал на прикрытие сопла , но так как РУД находится в положении ФР, то площадь сопла может уменьшиться только до некоторого минимального значения, соответствующего данному положению РУД. А так как это значение гораздо больше, чем на максимальном режиме, обороты вентилятора продолжат увеличиваться, что вызовет снижение расхода топлива подаваемого в основную камеру сгорания. Значения параметров на новом установившемся режиме будут зависеть от программ заложенных в ограничитель предельных параметров. Возможно появление большого перепада давления воздуха в наружном контуре и газа в ФК, что может привести к деформации элементов конструкции двигателя.
Заклинивание реактивного сопла.
Если эта ситуация возникает в положении сопла, соответствующем максимальному режиму, то это приводит к ухудшению процесса приемистости, невозможности включения форсажного режима, а при работе двигателя на форсажном режиме уменьшение площади горла сопла приведет к потере ГДУ двигателя.
Переходные процессы в двигателе при повреждении элементов автоматики.
- отклонения в работе электронной части САУ в двух вариантах отказов:
а) одновременный отказ электронного канала и агрегата перенастройки гидромеханического канала – приводит к потере ГДУ;
б) отказ электронного канала с различным временем срабатывания агрегата перенастройки – при быстром срабатывании агрегата (не более 0,3 сек.) существует возможность парировать отключение электронного канала с допустимыми отклонениями параметров двигателя.
неисправности в Автомате Приемистости двигателя. Для нормальной работы АП нужен достоверный сигнал Рк. Уменьшение сигнала по сравнению с фак-тическим на 10…15% для ДТРДФ приводит к существенному увеличению времени приемистости ( до 2-х раз ), однако параметры на установившемся режиме поддерживаются регулятором режима одинаковыми.
При больших искажениях Ркрасход топлива подаваемый в камеру сгорания существенно уменьшается, а расход топлива перепускаемого на слив увеличивается. Если сливные клапаны при увеличении режима остаются открытыми, двигатель может не выйти на расчетный режим, а установившийся режим будет соответствовать пониженному значению тяги (мощности) двигателя. При отказах АП, приводящих к перекрытию слива топлива, возрастает расход топлива в камеру сгорания, увеличивается превышение Тг , а при увеличении скольжения роторов может произойти потеря ГДУ одного из каскадов.
Переходные процессы в двигателе при повреждениях датчиков первичной информации.
отказ датчика частоты вращения вентилятора – обнуление сигнала - приводит к превышению Тгросту оборотов вентилятора, снижению тяги на несколько %;
отказ датчика частоты вращения турбокомпрессора – обнуление сигнала приводит к возрастанию оборотов вентилятора и турбокомпрессора и, следовательно, к прикрытию сопла до Fmin, а при работе на максимальном режиме у земли к возникновению колебаний тяги с частотой 2…5Гц. На приемистость не влияет.
отказ датчика температуры воздуха на входе в двигатель:
при ложном сигнале Твх minпри Н=0, М=0 - снижение режима
при ложном сигнале Твх maxпри Н=0, М=0 – режим не меняется, темп приемистости снижается.
отказ датчика температуры за турбиной, который испльзуется в канале ограничения Тт:
обнуление сигнала приводит к превышению Тгв переходных режимах, которое может недопустимой величины и особенно при приемистости от МГ до МАКС и от МГ до МАКСФ; на стационарных режимах работы при таком отказе параметры процесса в двигателе не изменяются.
Лекция 9
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ДВИГАТЕЛЯ.
Математическая модель ГТД на расчетном режиме, в основу которой заложены условия совместной работы отдельных элементов в системе двигателя, определяет физическую взаимосвязь между элементами двигателя. О том, насколько полно представлены физические взаимосвязи между элементами двигателя в математической модели, говорит ее уровень.
Нулевой уровеньпредставляет основные параметры двигателя в виде таблиц или графиков в зависимости от условий полета и параметров рабочего процесса.
Первый уровеньхарактеризует двигатель взаимосвязью между его элементами уравнениями, отражающими реальные условия их совместной работы, с дискретным изменением теплоемкости рабочего тела и формальным заданием значений коэффициентов, характеризующих потери в элементах двигателя ( нулевой уровень по элементам).
Второй уровеньхарактеризует двигатель наиболее точными физическими взаимосвязями между его элементами с переменным значением теплоемкости рабочего тела и заданием коэффициентов, характеризующих потери в элементах двигателя на базе детального расчета этих элементов по математическим моделям первого уровня.
Построение математической модели ГТД начинается с определения условий совместной работы элементов в системе двигателя и взаимосвязей между параметрами газовоздушного потока, проходящего через двигатель:
1. Баланс расходов в проточной части двигателя. При отсутствии перепусков и отборов воздуха из проточной части массообмен с воздушной средой отсутствует. Определяются:
расход воздуха через камеру сгорания;
расход газа через турбину;
расход газа через форсажную камеру и реактивное сопло
2. Определяется изменение энтальпии газовоздушного потока через двигатель.
3. Определяется изменение полного давления рабочего тела в проточной части двигателя.
4. Определяется соблюдение равенства и распределения мощностей развиваемых турбинами, потребляемых на привод компрессоров и приводы агрегатов с учетом механического КПД, определяющего затраты мощности на механические потери.
Термогазодинамический расчет ТРД, ТРДФ, ДТРД, ДТРДФ – математическая модель первого уровня.
Термогазодинамический расчет газогенератора ГТД – математическая модель второго уровня – расчет по этой модели ведется последовательно от сечения к сечению по проточной части газогенератора.
Лекция 10
Динамика прочностная.
Большинство дефектов авиационных ГТД связано с действием
переменных нагрузок, поэтому повышение динамической прочности двигателя является одним из важнейших условий эффективности применения авиации.
Динамическая прочность двигателя определяется возникающими в его деталях перемеными напряжениями и конструкционной прочностью их материалов.
Динамическая прочность деталей авиационных двигателей обеспечивается путем правильного сочетания механических свойств материала при действии переменных напряжений с уровнем переменных напряжений в рабочих условиях. Чем ниже переменные напряжения, тем легче обеспечить высокую надежность и большой ресурс работы двигателя.
Однако значительное уменьшение напряжений ведет к утяжелению двигателя и требует длительной и сложной доводочной работы. Поддержание переменных напряжений на допустимом уровне обеспечивается комплексом расчетно-экспериментальных работ, проводимых на всех этапах конструирования, доводки, производства и эксплуатации. Особо важно- правильный расчет основных частот собственных колебаний деталей и узлов двигателя.
Частота гармонических колебаний - собственная частота, зависит от упругих и массовых (инерционных)свойств элемента, а также от условий его закрепления ( Р ). При воздействии на элемент переменной силы Р(t)=Р0 соs р t
Ро -амплитуда, р- круговая частота возникают вынужденные колебания.
Масса М, имеющая упругую связь с др.элементами. При малом отклонении x на такой элемент действует упругая восстанавливающая сила
Рупр.=-сх с - коэффициент жесткости
и движение массы описывается уравнением
Мх = -сх (х = dx/dt, х = d х/dt ) х- скорость
х- ускорение
при начальном х =0 и условии х(0) =0 получаем вид уравнения х(t)=х(0)cosp t
где p = с/м т.е.каждый элемент при малых начальных отклонениях начинает совершать гармонические колебания с определенной круговой частотой.
Ро - собственная частота колебаний.
Если начальное отклонение вызвано случайной причиной или постоянной (статической) силой Рст, то под влиянием сил трения собственные колебания быстро затухают и тело занимает новое равновесное положение.
При воздействии на элемент переменной силы Р(t)=Ро cos pt
Ро-амплитуда р-круговая частота
возникают вынужденные колебания
Xo cos pt
X(t)= ------------- где Хо=Ро/с
1-(p/Po)
когда частота возбуждения р совпадает с собственной частотой Ро, наступает резонанс.
При демпфировании через воздействие сил трения Ртр= -Кх
Хрез = Ро/(РоК)
АВТОКОЛЕБАНИЯ - колебания, возникающие в результате появления при
некоторых условиях работы переменных сил, порождаемых в результате
обратной связи между колебаниями деталей (лопаток, дисков, лабиринтных уплотнений) и действующими на них газодинамическими нагрузками, при недостаточном демпфировании. При автоколебаниях напряжения могут быстро развиваться до недопустимого уровня.
Динамика ( прочностная) авиационных ГТД включает в себя главное:
-расчетное и экспериментальное определение собственных частот и
форм колебаний деталей и узлов,
-анализ источников возбуждения колебаний,
-анализ условий возникновения резонансов и мер по их устранению,
-исследование демпфирования колебаний и способов его повышения,
-исследование автоколебаний и средств их устранения,
-определение критических частот вращения роторов, в том числе многовальных,
-исследование способов снижения вибраций двигателя и оптимизации
упруго-демпферных опор,
-разработка экспериментальных методов регистрации и анализа переменных процессов в деталях и узлах двигателя в рабочих условиях,
-разработка методов вибрационной диагностики тех. состояния двигателя.
Лекция 11
Возбуждение колебаний лопаток и дисков.
Вынужденные и резонансные колебания.
Вынужденные - сумма гармонических колебаний с постоянной амплитудой и частотой, равной частоте возбуждения и затухающих колебаний, частота которых равна частоте свободных колебаний.
Нагрузки, действующие на лопатку
Перед рабочими лопатками параметры потока (скорость, давление, температура) распределяются неравномерно по окружности и по радиусу колеса. Окружная неравномерность вызывается несимметричностью входных и выходных устройств, неравномерностью процесса горения, сопротивлением стоек и неподвижных лопаток, радиальная неравномерность обусловлена закруткой потока по длине пера лопатки, концевыми потерями и др. причинами. В турбинах для повышения статической прочности лопаток низкие температуры создают в комлевой части
лопаток.
Если имеется неподвижная окружная неравномерность параметров потока, то при вращении рабочей лопатки ее сечения проходят участки потока с различными давлениями и испытывают переменные по времени нагрузки.
Период изменения по времени газодинамических нагрузок ,действующих
на вращающуюся лопатку при неподвижной окружной неравномерности потока и постоянной частоте вращения ротора n об/сек
Т = 1/n = 2 /
Неравномерность потока перед рабочими лопатками осевого компрессора
в некоторых случаях может вращаться вокруг оси двигателя в направлении, совпадающим с направлением вращения ротора (вращающийся срыв) с угловой скоростью ср меньшей угловой скорости ротора .
В многовальных двигателях неравномерность потока может вращаться с угловой скоростью "скольжения" равной разности угловых скоростей соосных роторов.
Колебания лопаток при отсутствии внешних сил (например, под влиянием начального отклонения) называются свободными.
Колебания от взаимодействия сил упругости и инерции без учета сил демпфирования называются собственными.
Первая форма
}- изгибные колебания в двух плоскостях
Вторая форма
Третья форма - крутильные
Четвертая форма - продольные
Форма колебаний - степени свободы.
Гармоника - отзыв на действие вынуждающей силы - частота вращения.
При этом различают несколько изгибных и крутильных форм для лопа-
ток с разной степенью закрученности .
Наряду с низшими формами колебаний в лопатках легко возбуждается
первая (основная) пластиночная форма, связанная с поперечным изгибом пера лопатки и деформацией ее поперечных сечений.
Собственные колебания:
изгибная - первая, шестая
крутильная - пятая, седьмая,
пластиночная - восьмая, десятая
вторая и третья - результат взаимодействия второй изгибной и первой крутильной.
Девятая - результат взаимодействия пластиночной и четвертой изгибной.
Четвертая и пятая - связаны влиянием деформации изгиба в плоскости
большей жесткости.
Расчет колебаний - по теории оболочек с привлечением метода конечных элементов.
При пластиночных и сложных высокочастотных формах колебаний сечения лопатки деформируются. Для анализа вынужденных колебаний по таким формам необходимо иметь данные о распределении давления по всей поверхности пера лопатки. Источниками возбуждения колебаний лопаток могут быть не только аэродинамические силы, но и переменые усилия, передающиеся через диск и замок (кинематическое возбуждение). Особенно интенсивным бывает кинематическое возбуждение от элементов редуктора в турбовинтовых двигателях.
В ГТД резонансные колебания лопаток зависят от взаимосвязанности лопаток, собранных в венец. При слабой связанности каждая лопатка резонирует при совпадении ее собственной частоты с частотой возбуждения, независимо от поведения других лопаток. При сильной связанности поведение каждой лопатки зависит от динамического состояния лопаточного венца и колеса в целом. Резонансные колебания отдельных нежестких лопаток на массивных дисках или барабанах
можно рассматривать без учета связанности колебаний лопаток в венце.
Частота гармоники (К -ой ) f = Кn (f - в гц, n - в об / с).
Резонансные условия f = Кn =(К =1,2,3... ,)=f i(n) (i=1,2,3...)
f (n)- собственная частота колебаний лопатки по i - ой форме, зависящая от частоты вращения n. Из-за разброса собственных частот условия резонанса для каждой лопатки выполняются при различающихся значениях частоты вращения ротора n .
Повышенные напряжения при резонансе возбуждаются только теми гармониками, у которых величина амплитуд Ак достаточна для этого, а закон распределения Ак (z) не ортогонален (не перпендикулярен) к данной собственной форме колебаний. Наибольшие амплитуды при окружной неравномерности, создаваемой несимметричностью входных и выходных устройств, имеют низкие гармоники К =1,2,3...
Первая гармоника (К = 1) не вызывает резонансов лопаток ,т.к. с увеличением частоты вращения ротора частоты колебаний по изгибным формам увеличиваются так, что всегда f >n . Условия резонанса для крутильных форм с первой гармоникой обычно находятся далеко за пределами nmax ротора. Для окружной неравномерности, создаваемой равношаговыми элементами в проточной части, наибольшие амплитуды имеют гармоники с номерами равными N ,иногда- 2N .
Резонансные колебания возбуждаются при расположении окружной
неравномерности ,как перед рабочими лопатками, так и за ними.
Расчет собственных частот и форм колебаний лопаток на основе теории стержней.
Система координат. Начало основной системы координат расположено в центре масс корневого сечения лопатки (рис. 1.1), ось Z совладает с радиальным направлением (осью r), ось X направлена вдоль оси вращения (по 'потоку газа), ось Y лежит в плоскости вращения и образует с осями X и Z правую систему координат.
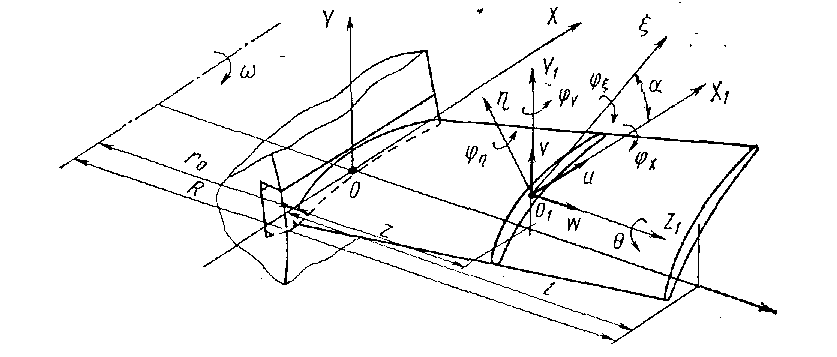
Рис. 1.1. Схема и оси координат закрученной рабочей лопатки
Рассматривается
также местная система координат с
началом в центре массы поперечного
сечения лопатки (точке O1).
В ней оси
Х1,
Y1,
Z1
параллельны
осям основной системы, оси
![]() ,
,
![]() лежат в
плоскости поперечного сечения и являются
главными осями; они повернуты на угол
а по отношению к осям X,
Y
(или Х1,
Y1).
Ось лопатки можно считать прямолинейной
и совпадающей в не деформированном
состоянии с осью Z.
При деформациях центр масс сечения
получает перемещения вдоль осей X,
Y,
Z
соответственно
и, u,
w;
сечение поворачивается на углы
лежат в
плоскости поперечного сечения и являются
главными осями; они повернуты на угол
а по отношению к осям X,
Y
(или Х1,
Y1).
Ось лопатки можно считать прямолинейной
и совпадающей в не деформированном
состоянии с осью Z.
При деформациях центр масс сечения
получает перемещения вдоль осей X,
Y,
Z
соответственно
и, u,
w;
сечение поворачивается на углы
![]() х,
х,
![]() y
и
y
и
![]() относительно центральных осейХ1,
Y1,
Z1.
относительно центральных осейХ1,
Y1,
Z1.
Уравнения равновесия составляются для элемента лопатки, выделенного двумя близко расположенными поперечными сечениями (рис. 1.2). На элемент объема dFdz в точке А действуют силы инерции при колебаниях
-![]() ;-
;-
![]() ;-
;-
![]() ,
,
где
dM=
rqdFdz;
![]() ;
;
![]() ;
;
![]() ,
,
и центробежные силы при частоте вращения ротора w
dCr== rw2(r+wA) dFdz; dCY = rw2(y1 + uA) dFdz. (1.1)
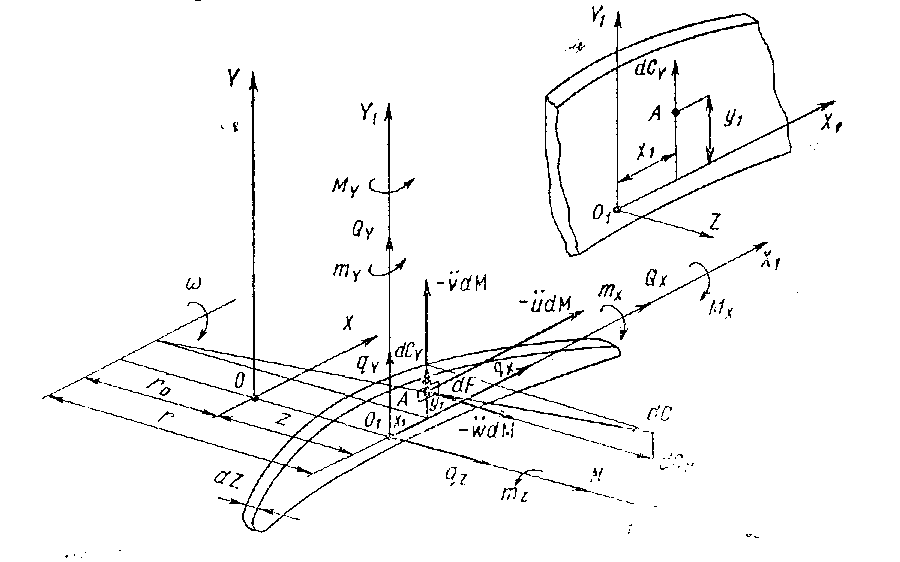
Рис. 1.2. Усилия, действующие на колеблющуюся вращающуюся лопатку
При строгом учете инерционных сил следует принимать во внимание кориолисовы силы инерции, однако при расчетах частот и форм колебаний ими можно пренебречь. Смещения точки A, считая поперечное сечение «жестким», будут
uA = и — qy1; vA = v + qx1; wA= w + fXy1 - fyx1 (1. 2)
Предполагается приближенно, что центры массы и центры жесткости сечении совпадают.
Равнодействующие усилия qx, qy, qz и моменты тх, my, rnz инерционных сил на единицу длины лопатки запишутся так:
qx
= -
r![]()
qy=
-
r![]() ;
;
qz
=
-
r![]()
mx
=
![]() ;
(1.3)
;
(1.3)
my
=
![]() ;
;
mz=
![]() .
.
В последних уравнениях JX, JY, JXY осевые и центробежный моменты инерции сечения лопатки относительно осей Х1 Y1 JP — полярный момент инерции относительно оси Z1 (здесь и в дальнейшем используем запись JX вместо JX1 и тх вместо тХ1 и т. д.). Анализ показывает, что при колебаниях лопатки можно пренебречь инерционными усилиями, связанными с осевым перемещением w, а в большинстве задач — и инерцией поворота относительно осей Х1 У1. Учитывая это, запишем уравнения равновесия элемента лопатки в виде
![]()
![]() ;
(1.4)
;
(1.4)
![]()
![]() ,
,
где Qx, QY и N — перерезывающие и нормальная силы в сечении лопатки; МX, MYt MZ — составляющие момента в сечении. Усилие N с точностью до малых членов определяется действием центробежных сил, и в дальнейших соотношениях его следует считать заданным, как и постоянную составляющую крутящего момента rw2JXY.
При собственных колебаниях лопатки перемещения и усилия изменяются по гармоническому закону:
u(z, t) — u(z) cos pt; Qx(z, t) = Qx(z) cos pt и т. д. (1.5)
где р — круговая частота колебаний в рад/с; частота колебаний в герцах (1/с) f = p/(2p). С учетом выражении (1.5) условия равновесия для амплитудных значений переменных факторов записываются так:
![]()
![]() (1.6)
(1.6)
![]()
где
обозначено
![]() и
т. д. Заданная центробежная сила N
определяется третьим уравнением(1.4),
откуда
и
т. д. Заданная центробежная сила N
определяется третьим уравнением(1.4),
откуда
N
=![]() .
.
Соотношения упругости. При изгибных деформациях незакру-ченной лопатки смещение точки А поперечного сечения с координатами x, h) вдоль оси лопатки Z на основании гипотезы плоских сечений будет
wA= w + jxh - jhx
где w — смещение центра тяжести сечения; jx, jh — углы поворота сечения. Деформация
![]() (1.7)
(1.7)
Выражение (1.7) приближенно справедливо и для не сильно закрученных лопаток. Принимая напряженное состояние одномерным (s = Еe), где s — нормальное напряжение в поперечном сечении, E - модуль упругости, и учитывая связь между силовыми факторами и напряжениями
![]() (1.8)
(1.8)
здесь Mx, Mh — изгибающие моменты относительно главных осей x, h, найдем деформацию e0 и составляющие упругой кривизны оси
e0
=
![]() (1.9)
(1.9)
где Jx, Jh — главные моменты инерции сечения.
Составляющие кривизны упругой линии лопатки по осям X и У
cX
=
![]()
(1.10)
cY
=
![]()
причем Мx = MX cos a + MY sin a; Mh = — MX sin a + MY cos a.
(1.11)
Автоколебания(флаттер)- самовозбуждающияся (без внешних периодических воздействий ) колебания рабочих лопаток, возникающие в определенных условиях обтекания их воздушным потоком. В основе автоколебательных процессов лежат обратные связи, т.е.силы возникающие вследствие колебательных движений упругих тел и поддерживающие эти движения. В лопаточных венцах обратные связи имеют аэродинамическое происхождение, а колебания связаны с упругими деформациями лопаточного венца, такие автоколебания называют аэроупругими.
Необходимую для поддержания колебаний энергию лопатки получают от обтекающего их потока воздуха. Автоколебания представляют большую опасность для лопаток из-за быстрого нарастания напряжений до недопустимо высоких значений. Поэтому важно знать границу их возможного возникновения и условия влияющие на ее положение (испытания с тензометрированием). Автоколебания лопаток имеют общие черты с автоколебаниями крыла, но принципиально отличаются от них, т.к. представляют собой колебания лопаточного венца как единой динамической системы.
Типы автоколебаний:
- срывные автоколебания, возникающие на больших углах атаки, когда происходит отрыв потока и производная коэффициента нормальной к профилю силы С по углу атаки становится отрицательной;
- низкочастотные автоколебания (наибольшая опасность для компрессоров), возникающие на ступенях без антивибрационных связей и происходящие по основной форме изгибно-крутильных колебаний лопаток. Эти автоколебания происходят с общей для всего венца частотой, близкой к средней частоте собственных колебаний лопаток по первой форме. Между колебаниями соседних лопаток всегда имеется некоторый сдвиг фаз. В однородном венце сдвиг фаз постоянен и равен = 2 m/ n
m -число волн деформаций венца по окружности колеса
n -число лопаток.
Неоднородность лопаточного венца - разночастотность отдельных лопаток сильно влияет на аэроупругую устойчивость. Венцы с неодинаковыми по собственной частоте лопатками более устойчивы, чем однородные, но повышение неоднородности сверх некоторой величины уже не дает улучшения (Роmax- Роmin), имеет значение и расстановка лопаток по венцу.
Прогнозирование границ автоколебаний осуществляется:
- путем теоретического анализа критериев, определяющих аэроупругую устойчивость лопаточных венцов при различных типах колебаний;
- использованием вероятностно-статических оценок, основанных на обработке экспериментального материала.
Частотная отстройка от резонансов - средство эффективного снижения динамических напряжений для двигателей с узким диапазоном рабочих частот вращения.
Для двигателей с широким диапазоном рабочих частот вращения полезно переводить сильные резонансы на малоиспользуемые или переходные частоты вращения. Разброс частот устанавливается по результатам виброиспытаний не менее трех комплектов лопаток серийного изготовления, но и расчетным путем с учетом допусков на размеры лопаток, обеспечивающих min и max частоты.
Уменьшение интенсивности возбуждения от газовых сил.
Неравномерности потока, возникающие в воздухозаборнике, имеют интенсивные низкие гармоники, которые могут возбуждать повышенные резонансные напряжения по низким формам в различных, но особенно, в первых ступенях компрессора.
Неравномерность может усилиться при работе двигателя на стоянке, при боковом ветре, при попадании газов из реактивного сопла на вход (особенно на вертолетах) и в других нерасчетных условиях.
Уменьшение возбуждения достигается путем общего выравнивания поля давлений по окружности или путем уменьшения только опасных гармоник неравномерности потока.
Неподвижные элементы конструкции в проточной части приводят к возмущениям, которые передаются по потоку и против него.
За Н.А. и стойками возникают кромочные следы - участки с пониженными скоростями и давлением по сравнению с ядром потока. Возбуждение уменьшают путем улучшения обтекания, введением разношагости, увеличением осевого зазора между вращающимися и неподвижными решетками и др., при этом увеличивается аэродинамическое демпфирование на лопатках. (Испытание - снятие полей Р и тензометрирование.)
Камеры сгорания являются источниками неравномерностей по окружности полей Т и Р ,зависящих как от процессов горения так и от неравномерности потока воздуха за компрессором, от блочной конструкции элементов к.сг. и газосборника, от местных отборов и подводов воздуха и др. Амплитудные и фазовые спектры неравномерности Т и Р обычно не совпадают, что приводит к неодинаковым зависимостям от них суммарных переменных газовых сил для различных гармоник.
Особенности колебаний дисков с лопаточными венцами.
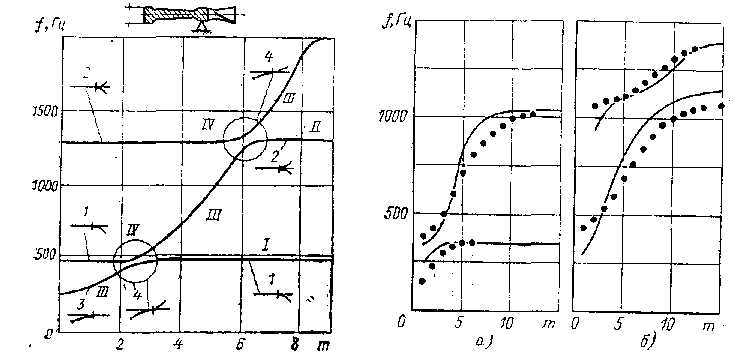
На рис. 3.4 показана зависимость, первых трех частот собственных колебаний диска с лопатками от числа волн при опирании диска по ободу [69] B данном случае диск относительно слабо взаимодействует с лопатками в спектре частот четко различаются лопаточные частоты, не зависящие от числа волн (горизонтальные участки кривых 1—III), и частота диска с жесткими лопатками
|
Рис. 3.4. Собственные частоты колебании диска с лопатками: 1—I1I—участки слабого взаимодействия диска с лопатками; IV—участки сильного взаимодействия; 1, 2—первые изгибная и крутильная формы колебаний лопаток; 3—колебания диска; 4— совместные колебания |
Рис. 3.5. Собственные частоты колебаний колеса турбины с полочными лопатками: а—зазор между полками; б—натяг по полкам __ ——— — расчет; Ä—эксперимент |
(участки IV). Сильное взаимодействие этих форм и изменение частот проявляются только при тех числах волн, где парциальные частоты лопаток и диска пересекаются. С изменением числа волн меняется порядок чередования форм. На рис. 3.4 и др. зависимости f(m) представлены условно в виде непрерывных кривых, хотя физический смысл они имеют только при целых числах т. В некоторых случаях наблюдается более сильное взаимодействие элементов системы, охватывающее ряд чисел волн.
Из-за фазовых сдвигов между отдельными составляющими соответствующие им узловые точки оказываются на разных радиусах, т. е. строго говоря, в системе нет узловых (неподвижных) линий, как это присуще элементарном задачам. Узловые «диаметры» на диске также оказываются искривленными [43]. Хотя такие искажения узловых линий невелики, они приводят к определенному «размытию» картины колебаний при ее экспериментальном изучении.
Натяг по антивибрационным (бандажным) полкам существенно влияет на спектр колебаний колеса. На рис. 3.5, а приведены результаты расчета частот колеса турбины с полочными лопатками, имеющими зазор между полками, на рис. 3.5, б - того же колеса, но с натягом между полками, образующими сплошное бандажное кольцо. Первая форма колебаний изолированных лопаток в плоскости меньшей жесткости, интенсивно взаимодействовавшая с диском при малом числе волн, при наличии натяга исчезла; вторая форма, связанная в основном с колебаниями диска и лопаток в плоскости их большей жесткости (аксиальные колебания колеса) почти не изменилась; появилась новая форма связанных колебании системы в целом. Экспериментальные значения частот, полученные спектральным анализом осциллограмм (см. гл. IV), хорошо совпали с расчетными.
Если
для отдельного осесимметричного диска
положение узловых линий при данном
числе волн произвольно, то для колеса
с лопатками их положение относительно
лопаток для каждой формы колебаний
вполне определено, а
произвольным
является лишь положение лопатки i
=1, относительно которой выбирается
начало
отсчета
координаты q.
Так же как для отдельного диска, для
колеса в целом кроме форм колебаний Ym
по уравнению
(3.28) существуют ортогональные им формы
![]() (r,
q)
=
(r,
q)
=
![]() m(r)
sin
mq
—
m(r)
sin
mq
—
![]() m(r)cos
mq
с независимыми
амплитудами и фазами.
m(r)cos
mq
с независимыми
амплитудами и фазами.
Колеса с неоднородными лопаточными венцами. Лопатки реальных колес всегда .имеют некоторые отличия в пределах чертежных допусков на изготовление. Не вполне одинаковы размеры и расположение полок, шаги лопаток и другие параметры. Это проявляется, в частности, в разбросе собственных частот лопаток, выполненных по одному и тому же чертежу. Разброс частот необходимо учитывать при сопоставлении расчетных и экспериментальных данных и при отстройке лопаток от резонансов. Различие между лопатками влияет на положение точек с максимальными напряжениями и на соотношение напряжений в различных точках лопаток, что должно учитываться при проведении тензометрирования и анализе его результатов.
Неодинаковость лопаток делает венец не строго однородным и нарушает его циклическую симметрию. В этом случае общее число форм собственных колебаний при данном числе волн не меняется, но вместо каждой пары ортогональных форм с одинаковыми частотами появляются две различные формы с близкими, но уже не строго одинаковыми частотами; происходит «расслоение» спектра частот [38]. Расчеты показывают, что практически возможная для колес газотурбинных двигателей расстройка частот незначительна. Однако, связанные с нею фазовые сдвиги и наложение расслоившихся форм колебаний являются одними из основные, источников неравномерности распределения напряжений по лопаточному венцу при его колебаниях на двигателе.
В однородных колесах положение узлов по окружности определяется условиями возбуждения колебаний; в неоднородных каждая из двух близких форм колебаний имеет свою конфигурацию.
Лекция 12
Демпфирование колебаний.
Энергия колебаний рабочих лопаток рассеивается в потоке газа (аэродинамич. демпфирование), при деформациях лопаток и диска (механич.демпфир. в материале) и при трении в сочленениях различных элементов рабочего колеса (конструкцион.демпфир.).
Наиболее полную оценку суммарного демпфирования при колебаниях лопаток в рабочих условиях, в том числе с учетом взаимовлияния лопаток в колесе, дает определение декремента колебаний по амплитудно-частотной характеристике, полученной спектральным анализом тензомагнитограмм (испытания лопаток и образцов на вибродинамике).
Декремент - величина, характеризующая степень ослабления затухающего колебательного процесса, он равен логарифму отношения двух последующих амплитуд затухающего колебания.
Для компрессорных лопаток с замком "ласточкин хвост" суммарные декременты по осн.форме составляют =0,04...0.10 (более 90% приходится на аэродинамич.демпфир.). Конструкцион.демпфирование в замке "ласточкин хвост" очень мало = 0,002...0,007.
Демпфирование и жесткость лопаточного венца компрессорной ступени существенно повышаются при введении антивибрационных полок, которые проектируются так, чтобы при повороте полок от упругого раскручивания лопаток в поле центробежных сил натяг по полкам увеличивался, а также применение шарнирных замков и демпфирующих колец.
Для турбинных лопаток основную роль в демпфировании играет конструкционное демпфирование в замковом соединении и в других сочленениях лопаток между собой и с другими элементами:
- раззазоривание;
- специальные демпферные элементы;
- вставные элементы, прижимаемые центробежными силами к нижней полке лопаток с удлиненной ножкой;
- разношагость неподвижных лопаточных венцов - средство снижения амплитуд переменных напряжений в рабочих лопатках при колебаниях по высокочастотным формам, возбуждаемых лопатками аппаратов, расположенных перед и за рабочим колесом.
Гармоники с номерами равными или кратными n (число лопаток) называются основными, остальные- побочными.
В практике конструирования различают: групповую разношагость, секторную разношагость, поворотную разношагость.
Критические частоты вращения роторов
При некоторых частотах вращения, называемых критическими, могут возникнуть опасные прогибы ротора, приводящие к задеванию ротора о статор, разрушению подшипников и двигателя. Такие частоты вращения при расчетах как и эти режимы исключаются из рабочей области. Для ротора с уравновешенным диском массы М посередине, вращающийся с угловой скоростью (е=0) :
начальный прогиб -y и при вращении в изогнутом состоянии возникнут две силы:
1.Сила упругости Рупр. = сy (где с - коэф-т жесткости)
стремится вернуть ротор в недеформированное состояни.
2.Центробежная сила С = М y
Если Рупр. = С , то частота вращения критическая (простой случай).
В реальности при наличии эксцентриситета центра масс диска (е) от-но оси ротора, то условие равновесия:
М (y + е) = сy е е
при < кр - устойчивое равновесие y =---------- = ----------
с/(М )-1 кр / - 1
при > кр - возможны больщие прогибы
Связанность колебаний.
Схемы роторов - одновальная, двухвальная, трехвальная. Роторная система вместе с корпусами - единая упругая система "Ротор - корпус".
В такой системе возникают связанные колебания, собственные частоты которых могут существенно отличаться от частот и форм колебаний отдельных роторов. Основной источник возбуждения колебаний - дисбалансы роторов.
Если роторы вращаются с различными угловыми скоростями, то при совпадении частоты вращения одного из роторов с одной из собственных частот связанных колебаний системы, т.е. при прямой синхронной прецессии данного ротора, другие роторы будут находиться в режимах несинхронных прецессий. Таких критических состояний системы может быть несколько.
Изгибные колебания роторов и систем ротор - корпус.
Вынужденные колебания роторов, которые возникают под действием периодических возбуждений, основным источником которых являются центробежные силы инерции неуравновешенных масс ротора. Источниками вибраций также могут служить пульсации потока газа в камере сгорания, реактивном сопле, форс. - камере, пульсации давления топлива, изгибными колебаниями лопастей воздушного винта, колебания связанные с его неуравновешенностью;
источниками высокочастотных возбуждений (5-10 КГц) могут быть также зубчатые передачи, подшипники качения, рабочие лопатки и др.
Наиболее общий и эффективный способ снижения вынужденных колебаний системы ротор-корпус - постановка упруго-демпферных опор.
Амплитудно - частотные характеристики ГТД.
Определение АЧХ двигателей при вынужденных колебаниях под действием неуравновешенности основано на рациональном выборе динамической модели системы двигателя. Эквивалентность модели и реальной конструкции должна подтверждаться данными экспериментальных исследований. Расчет АЧХ связан с проблемой прогнозирования уровня вибраций во всем рабочем диапазоне частот вращения, которая может решаться при проектировании на основе статистических распределений дисбаланса и демпфирования для двигателей данного типа.
Важно правильно оценить эффективность выбора мест установки вибродатчиков с точки зрения наибольшей информативности.
Лекция 13
Методы снижения вибраций.
Отстройка от критических и резонансных частот вращения.
Наиболее опасными для систем двигателя являются прецессионные движения роторов, при которых изгибные колебания происходят с частотой, совпадающей с угловой скоростью какого-либо ротора, который в этом случае находится в режиме прямой синхронной прецессии в системе многовального двигателя ,т.е.для такого (К -го) ротора = = Ро, а остальные ,вращающиеся в том же направлении i -е роторы, в режиме прямых несинхронных прецессий т.е. = Ро, но i = Ро. Такие колебательные состояния системы могут рассматриваться как критические.
Отношение частот вращения роторов = / .
При произвольной зависимости между частотами вращения роторов критическое состояние системы ротор - корпус двигателя также наступает при некоторых определенных соотношениях между ними, когда для одного из роторов параметр л = 1.
Демпфирование колебаний.
Рассеивание энергии в системе двигателя происходит путем конструкционного демпфирования в деталях, осуществляющих взаимную связь элементов (фланцевые, шлицевые и др. соединения узлов, детали крепления и др.) в опорах роторов, благодаря трению в подшипниковых узлах и специальных конструктивных элементах, вводящих дополнительное рассеивание энергии.
Демпфирование связано также с рассеиванием энергии в материале вращающихся роторов и неподвижных элементов системы.
Демпфирование в материале и конструкционное демпфирование в соприкасающихся деталях ротора часто объединяются понятием внутреннего трения.
Кроме того в двигателе имеется аэродинамическое демпфирование, трение в лабиринтных уплотнениях, трение среды, в которой вращается ротор. Эти виды вращения энергии эквивалентны распределенному внешнему трению, которое рассматривается обычно вязким, пропорциональным скорости перемещения.
Из опыта установлено ,что основным демпфирующим элементом являются
опоры роторов, в которых сосредоточены основные силы сопротивления системы. Демпфирование в опорах роторов рассматривается как линейное вязкое трение, т.е.пропорциональное частоте колебаний. Введением в расчет специальных коэффициентов оно может приводиться к частотно независимому демпфированию. Наличие внешнего трения обеспечивает устойчивую работу роторов за критической частотой вращения.
Под упруго-демпферной опорой подразумеватся конструкция опоры, в которой кроме упругого элемента введен элемент линейно-вязкого трения.
Цель отстройки.
Если минимальная критическая частота вращения роторов на жестких опорах кр. превосходит их рабочие частоты вращения, роторы называют жесткими. Опоры ротора в двигателе всегда имеют некоторую собственную податливость, связанную с упругими деформациями подшипников, опорных стоек, диафрагм, корпусов в местах крепления опорных стоек и диафрагм. Используются также специальные упруго-демпферные опоры, вводящие дополнительную податливость и демпфирование. Из-за влияния собственной податливости опор критическая частота вращения ротора заметно снижается. Если отношение критической частоты на жестких опорах и рабочей частоты вращения составляет кр/ раб 1,3...1,4,
то с учетом собственной податливости опор эта частота обычно оказывается в рабочем диапазоне. При небольшой податливости опор прохождение ротора через критическую частоту вращения, как и при жестких опорах, может быть связано со значительными прогибами валов и сильными вибрациями. Введение упругих опор с повышенной податливостью приводит к тому, что на первой, а иногда и на второй критических частотах вращения ротор перемещается как твердое тело, а изгибные деформации валов становятся незначительными. Проход системы через такие критические частоты, особенно при малой частоте вращения, обычно не представляет опасности для ротора и двигателя в целом. Последующая же критическая частота вращения, связанная с изгибом самих валов, уходит за рабочий диапазон. Увеличение быстроходности и усложнение схем двигателей приводит к тому, что в диапазон рабочих частот может попасть первая, а иногда и вторая критические частоты вращения ротора на жестких опорах.
Такие роторы называются гибкими и требуют повышенной точности балансировки и высокого качества их сборки, так как в этом случае даже при введении упругих опор критические частоты, связанные с изгибом валов ротора, обычно остаются в рабочем диапазоне и требуется введение дополнительного демпфирования в опоры.
Особо существенным является правильный выбор расчетной модели ротора
и системы двигателя в целом. Доводка - изменение жесткостных характеристик и (или) постановка упругих опор.
При назначении величины податливостей опор должна быть проведена оценка минимального уменьшения конструктивных зазоров в упругих опорах под нагрузкой, так как в случае ликвидации зазора упругая опора перестает быть эффективной.
Расчетная динамическая модель системы.
На ранних этапах проектирования роторы схематизируются как одно- или
многомассовые системы с постоянной жесткостью, затем учитываются масса
вала, гироскопический эффект дисков, особенности посадки дисков на рото-
ре. Выбор динамической модели системы ротор - корпус заключается в уста-
новлении характера и числа упругих связей роторов между собой и с корпусами двигателя. Величина податливостей упругих связей может быть установлена экспериментально при определении статических деформаций опор в системе двигателя или заложена в расчет по опыту имеющихся аналогичных конструкций данного типа.
На практике к критическим частотам вращения обычно относят только те,
на которых наблюдаются повышенные деформации роторов или их значитель-
ные перемещения на упругих опорах, а режимы на которых преимущественно
колеблются корпусы, называют резонансными.
Наибольшие нагрузки на опоры возникают на критических режимах.
По характеру вибраций корпуса с роторной частотой при вибрографировании не всегда возможно отделить критические режимы двигателя от резонансных. Для этого приходится сопоставлять экспериментальные вибрационные характеристики с данными расчета двигателя на колебания или проводить измерение прогибов ротора одновременно с вибрографированием.
Влияние податливости опор и их размещения.
Статические податливости опор,определенные экспериментально в системе
двигателя составляют от 5 х 10 до 40 х 10 мм/н и выше.
Спец.упругие опоры имеют диапазон податливостей существенно больший
до 200 х 10 мм/н.
В реальной конструкции не бывает =0 и экспериментальные значения n соответствуют собственной податливости опор в пределах от 5х10 до 10 х 10 мм/н. Собственная податливость опор может оказывать различное влияние на критическую частоту вращения.
Влияние конических цапф,консольной посадки дисков, дополнительных фак-
торов на изгибные колебания роторов - масса ротора, деформация сдвига
при изгибе вала, несимметрия корпусов, опор и самого ротора, действие
крутящего момента. Деформации сдвига и несимметрия опор (корпусов) -наиболее существенны с точки зрения изменения частотных характеристик.
Устранение критической скорости ротора изменением жесткости его опор
в процессе работы возможно в связи с тем, что с изменением жесткости
опор критическая скорость ротора принимает различные значения и возни-
кает возможность управлять критической скоростью так, чтобы в момент
вращения ротора с любой частотой его критическая скорость находилась
вдали от нее.