

книги из ГПНТБ / Хоренков А.В. Приборы артиллерийской разведки и их боевое применение учебное пособие
.pdfЧтобы ориентировать разведывательные теодолиты по общему ориентиру, наводят их в этот ориентир, а затем поворотом лимбов (включив перед этим трибки) устанавливают полученные по фор мулам отсчеты соответственно для правого и левого пунктов со пряженного наблюдения. В этом случае линия 30-00 теодолитов будет направлена вдоль базы засечки нулями вправо; необходи мыми для засечки цели углами, как и при способе взаимного ви зирования, будут являться: Z А и ^ В — отсчеты соответственно с правого и левого пунктов после наводки теодолитов на цель; ZC будет получен как разность отсчетов, т. е. ZC — ^ А — ZB.
Если возникает необходимость ориентировать разведыватель ные теодолиты по дирекционному углу ориентирного направле ния, поступают следующим образом.
Выбирают видимый с обоих наблюдательных пунктов такой ориентир, дирекционные углы на который с этих пунктов известны, и наводят в этот ориентир теодолиты. Затем на каждом из теодо литов устанавливают отсчеты, равные по величине известным дирекционным углам соответственно с правого (ВО) и с левого (АО) пунктов (рис. 18). Отсчеты устанавливают, как и в предыдущих способах. Когда перекрестия приборов наведены в выбранный
ориентир, линии 30-00 теодолитов окажутся |
в |
направлении |
оси X координатной сетки. Как видно из рис. |
18, |
отсчеты по |
ориентиру будут по своей величине совпадать с дирекционными углами на этот ориентир. Значит, при последующем наведении в цель или какую-либо другую засекаемую точку отсчет всегда бу дет соответствовать значению дирекционного угла на эту точку.
Из рис. 18 также видно, что необходимые для обработки за сечки ZA, Z B и ZC можно получить по формулам
^А = (АО)-(ВА);
^В = ( В О ) - ( В А );
^С =(АО )-(ВО ).
Вэтих формулах значения дирекционных углов с наблюда тельных пунктов на ориентир, а также дирекционный угол базы (с правого пункта на левый) могут быть известны по результатам топогеодезической привязки пунктов сопряженного наблюдения или получены решением обратной геодезической задачи (нахожде
ние дирекционных углов по координатам точек) непосредственно на наблюдательном пункте.
После получения задачи по обнаружению и определению ме стоположения инфракрасных источников противника РТ-2 подго тавливается к ночной работе. Его приводят в боевое положение, если он не использовался днем. Затем устанавливают электронно оптический визир, на головке теодолита закрепляется визирная вешка.
Прежде чем приступить к поиску и обнаружению инфракрас ных прожекторов, вставляют вилку от системы электропроводки в розетку на визире, подводя к нему питание.
30
При подготовке РТ-2 к ведению ночной разведки следует учи тывать, что визир располагается значительно ниже объективов зрительной трубы теодолита, а поэтому он должен возвышаться над бруствером окопа, чтобы имелась возможность ориентирова ния и ведения разведки поля боя. Возможно, при этом придется при работе ночью треногу прибора поднимать несколько выше или сделать соответствующую расчистку бруствера в секторе наблю дения.
Рис. 18. Схема ориентирования разведывательных теодолитов по дирекционному углу
Боевое применение разведывательных теодолитов РТ-2. Раз ведывательные теодолиты РТ-2 применяются для обнаружения целей с одного наблюдательного пункта, определения направле ния на них с этого пункта и для засечки целей с пунктов сопря женного наблюдения. В процессе выполнения этой работы изме ряются горизонтальные и вертикальные углы, а также определя ются расстояния.
При измерении горизонтальных углов прибор сначала наводят в правый предмет, а затем в левый. Величину угла определяют,
31
вычитая из отсчета по правому предмету отсчет по левому пред мету. Рекомендуется наводить прибор в предмет всегда с одной и той же стороны, чтобы мертвый ход механизма горизонтальной наводки не влиял на ее точность. Обычно один и тот же угол из меряют дважды, сбивая отсчет. За истинное значение угла берут среднее арифметическое двух измерений. Если разница между двумя измерениями угла не превышает 0-00,3, то угол считается измеренным точно. Когда эта разница больше, измерение произ водят снова.
Вертикальные углы при помощи теодолита РТ-2 измеряют не посредственно по угломерной сетке правого окуляра или же с по мощью механизма вертикальной наводки прибора. Для определе ния вертикальных углов между какими-то точками определяют сначала угол места каждой из точек, пользуясь механизмом вер тикальной наводки. Если углы места положительные, отсчеты сни мают по красной шкале, отрицательные — по черной. Величина вертикального угла будет равна разности углов места, взятых со своими знаками. При этом теодолит РТ-2 предварительно должен быть отгоризонтирован и произведена выверка «места нуля».
При ведении разведки целей с помощью разведывательных тео долитов дальность до цели с одного наблюдательного пункта опре деляется, если это необходимо, на глаз, с помощью дальномера, по ориентирам, с использованием карты, так как теодолит позволяет определить лишь направление на цель. При засечке цели разведы вательными теодолитами с пунктов сопряженного наблюдения эта дальность может быть получена после вычисления прямой засечки (ее обработки) аналитически на счислителе смешанным (с ис пользованием прибора управления огнем ПУО и счиелителя) или графическим методом (на ПУО, карте).
Для получения координат целей с точностью, необходимой для стрельбы артиллерии, при засечке их сопряженным наблюдением разведывательными теодолитами угол засечки должен быть не ме нее 0-50, а при засечке целей, обнаруживающих себя кратковре менно (блеском, дымом, пылью), — не менее 1-00.
Наибольшие трудности при работе с разведывательными тео долитами возникают в связи с необходимостью передачи целеука зания об обнаруженной цели на другой пункт сопряженного на блюдения. Порядок целеуказания при разведке днем и ночью оди наков, однако ночью он более затруднителен, а поэтому остано вимся на нем несколько подробнее.
Основная сложность в целеуказании ночью заключается в том, что с одного наблюдательного пункта очень трудно определить дальность до обнаруженного инфракрасного источника. Передача целеуказания, кроме того, затрудняется тем, что в поле зрения ночного визира одновременно может оказаться несколько инфра красных источников.
Основным способом целеуказания при организации сопряжен ного наблюдения является целеуказание по измененному отсчету.
32
Для передачи целеуказания таким способом используется спе циальный график, по которому определяется приближенное значе ние угла засечки (этот график приводится в Наставлении по опти ческой разведке, он может быть также и рассчитан в подразделе нии), или же этот угол рассчитывается по формуле
-г Б
0.001Д ’
где Б — величина базы (м)-, Д — дальность до цели (м).
Наведя перекрестие прибора в цель (при засечке инфракрас ных источников— марку ночного визира), снимают отсчет по цели и ее угол места. Этот отсчет изменяют на величину угла засечки (снятого с графика или полученного вычислением), пользуясь пра вилом: уменьшают отсчет на величину угла засечки при передаче целеуказания на правый пункт, увеличивают отсчет, когда целе указание производится на левый пункт. Измененный отсчет пере дается на другой НП.
Обнаружение инфракрасных прожекторов (поиск) может производиться с использованием бинокля БИ-8, а также ночного визира без астигматора, так как в этом случае такие цели будут более заметны. Как только цель обнаружена, для повышения точ ности ее засечки на объектив ночного визира надевается астигматор, и тогда в вытянутое в виде линии изображение инфракрас ного источника наводится вершина марки ночного визира.
Поиск целей осуществляется наблюдением в визир при одно временном вращении теодолита по направлению и качанию визира в вертикальной плоскости вращением маховичка вертикальной наводки.
При продолжительном ведении разведки ночью рекомендуется периодически выключать высоковольтный блок питания. Этим увеличивается срок работы аккумуляторов. По окончании боевой работы на НП ночью визир переводится в походное положение. При этом поступают в последовательности, обратной приведению визира в боевое положение.
Обработка данных засечек целей на счислителе. Вычисление прямой засечки аналитическим методом на счислителе «СТМ» проводят в следующем порядке:
— заблаговременно записывают в бланк (табл. 1) координаты наблюдательных пунктов: левого ХА, Y А и правого X B, Y в, а так
же дирекционный угол базы (ВА ) — действия 1—3;
—после получения отсчетов при засечке цели вписывают в бланк величины углов В я А (действие 4);
—вычисляют угол засечки С=А—В (действие 5);
—вычисляют значения (АС) =|(£Л)Ч-Л и (ВС) = (ВА) +В
(действие 6);
— по значениям (ЛС) и (ВС) определяют углы R, а также величины углов (15-00— R ) — действия 7, 8;
з Зак. 373 |
33 |
Таблица 1
Вычисление прямой засечки на логарифмическом счислителе «СТМ»
Левый НП: А= 25460; |
7 = 75157. |
|
|
|
|
|
|
|||||
Правый НП: А= 25795; 7=75448. |
|
|
|
|
|
|
||||||
Ориентир |
засечек: А= 29538; |
7 = 73545. |
|
|
|
|
|
|||||
(ВА) =36-83,0; аон =53-00; ВА = 443,6. Отсчет |
основного направле |
|||||||||||
ния: |
0 „ —а |
-»вл = 16-17. |
|
|
|
|
|
|
|
|||
и |
_______ |
____ |
|
|
Точка |
С |
Ц-101-105-л../ |
|||||
|
|
|
|
батарея |
||||||||
й <- |
|
|
|
|
|
|
|
|
|
|
|
|
S и |
|
|
|
|
|
|
|
|
|
Левый I Правый |
||
о.я |
|
|
|
|
|
|
|
|
|
|||
X! ® |
Действие |
|
~ |
— — |
|
|
|
|
НП |
J НП |
||
3 |
|
|
|
|
(ВА) |
|
|
|
|
|
36-83,0 |
|
4 |
|
|
А |
|
|
В |
|
|
10-66 |
9-54 |
||
6 |
(ЛС) = |
(ВЛ)-г Л |
|
(ВС)=(ВА)-ГВ |
47-49 |
46-37 |
||||||
7 |
J |
|
|
1ч. |
R |
|
7?= а-30-00 Шч. |
12-51 |
13-63 |
|||
|
|
|
|
|
|
|
|
|
|
|
1-37 |
|
8 |
д у |
|
= |
30-00—а Нч. 15-00—R д у ”+ ! Я=60-00-а1Уч. |
|
2-49 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
С =Л — В |
|
|
|
|
| |
Ы 2 |
|
9 |
т я |
|
ВА . |
|
— |
ВА |
. . |
3192 |
3410 |
|||
1 |
Л С ~ |
sinC 8ШВ |
|
В С = |
sin С |
8ШЛ |
25460 |
25795 |
||||
|
|
|
|
|
|
|
|
|
||||
10 |
ДА = |
ЛС sin (15-00-7?) |
ДА = ВС sin (15-00— R) |
+ |
821 |
+ 487 |
||||||
12 |
|
Ас = |
А д+ ДА' |
|
Х с - Х в + ДА |
26281 |
26282 |
|||||
14 |
|
|
|
|
Аср |
|
|
|
|
|
26282 |
|
2 |
|
|
Уд |
|
|
|
|
|
75157 |
75448 |
||
|
|
|
|
|
|
|
-3085 |
- 3375 |
||||
11 |
ДУ= ЛСвшТ? |
|
ДY = BC sin R |
|||||||||
13 |
. |
7 с = 7 д х Д 7 |
|
7 с “ |
Ув~гд У |
|
72072 |
72073 |
||||
15 |
|
|
|
|
7 с р |
|
|
|
|
|
72072 |
|
|
|
|
|
|
|
|
|
|
Вычислял Муштаков |
|||
— вычисляют на счислителе длины сторон АС и ВС треуголь
ника АВС по формулам |
__' |
|
АС: |
ВА |
Sin В: |
|
sin С |
|
ВС: |
ВА |
sin Л |
|
sin О |
|
в следующем порядке: |
|
_ |
1) индекс движка устанавливают на величину базы ВА по шкале чисел основного круга;
2) вращением подвижной шкалы синусов под индекс подводят значение sin С;
34
3) индекс движка устанавливают на величину sin В шкалы си нусов и по шкале чисел основного круга под индексом считывают
значение АС;
4) индекс движка устанавливают на величину sin А шкалы синусов и по шкале чисел основного крута под индексом считыва
ют значение_6 С. При определении числа целых единиц в дально стях АС и ВС учитывают, что дальность не может быть меньше базы и больше десятков тысяч метров. Полученные величины АС
кВС записывают в бланк (действие 9);
—вычисляют приращение координат АХ и ЛУ в следующем порядке:
|
От левого НП |
|
|
|
От правого НП |
|
|||||
1. |
Начало |
шкалы синусов |
1. |
Начало |
шкалы синусов |
||||||
подвижного |
круга |
ставят |
на |
подвижного |
круга |
ставят |
на |
||||
дальность А В по шкале чисел. |
дальность ВС по шкале чисел. |
||||||||||
2. |
Индекс |
движка |
ус |
2. |
Индекс |
движка |
ус |
||||
танавливают |
|
на |
величину |
танавливают |
|
на |
величину |
||||
sin(15-00—R a) и подиндексом |
sin (15-00— f(B) и |
подиндек |
|||||||||
по |
шкале |
чисел |
основного |
сом по шкале |
чисел основного |
||||||
круга считывают значение ДХд. |
круга считывают значение ДХВ. |
||||||||||
3. |
Индекс движка устанав |
3. |
Индекс |
движка устанав |
|||||||
ливают на |
величину sin |
и |
ливают на |
величину sin/?g и |
|||||||
под индексом по шкале чисел |
под индексом по шкале чисел |
||||||||||
основного |
круга |
считывают |
основного |
круга |
считывают |
||||||
значение Д УА. |
|
|
|
значение ДУВ. |
|
|
|||||
Полученные приращения вписывают в бланк (действия 10 и 11). Приращения координат прибавляют со своими знаками к ко ординатам соответствующих наблюдательных пунктов и дважды получают координаты цели (действия 12 и 13);
— из двух значений координат, если они отличаются одно от другого не более чем на 10 jvt, определяют среднее значение коор динат цели (действия 14 и 15).
Сходимость координат точки С, полученных по приращениям координат к точкам А и В (пунктов сопряженного наблюдения), свидетельствует только об отсутствии ошибок в вычислениях, но не является контролем правильности выполнения измерительных работ по засечке цели (ориентира, репера). Надежным контро лем правильности засечки является сходимость дальности с на блюдательного пункта до цели, полученной при вычислении пря мой засечки, с дальностью, определенной дальномером с этого же наблюдательного пункта. Расхождение этих дальностей не должно превышать 2% дальности засечки. При большем расхож дении засечку повторяют из-за ее ненадежности.
3* |
35 |
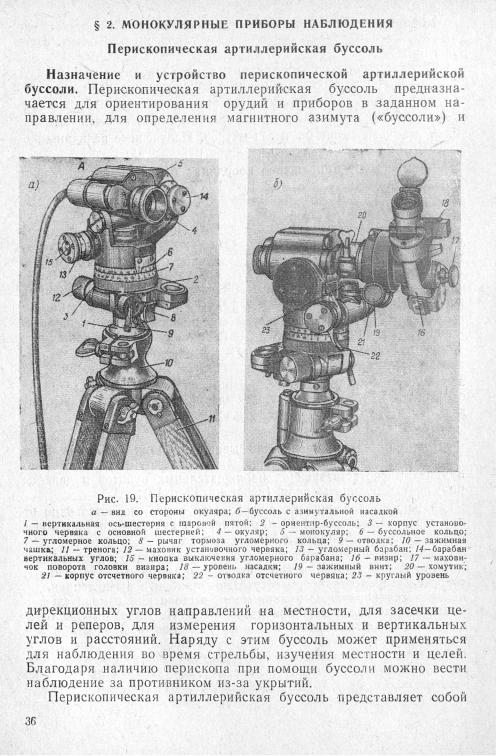
конструктивное соединение оптического и углоизмерительного при боров с ориентир-буссолью (компас в виде коробки с магнитной стрелкой). Ее внешний вид показан на рис. 19. В артиллерии наи большее распространение получила буссоль ПАБ-2. В ее комплект входят: собственно буссоль с футляром, перископ с футляром, тре нога, принадлежность для освещения и азимутальная насадка.
Собственно б у с с о л ь состоит из следующих основных частей: вертикальной оси-шестерни 1 с шаровой пятой; корпуса 3 устано вочного червяка с основной шестерней; ориентир-буссоли 2; корпу са 21 отсчетного червяка и монокуляра 5. Первые три составляют нижнюю часть буссоли, на которой имеются два кольца со шкала ми: черного цвета на буссольном кольце 6 (по ходу часовой стрелки) и красного— на угломерном кольце 7 (против хода часо вой стрелки).
Для быстрого поворота буссоли вокруг вертикальной оси уста новочный червяк снабжен отводкой 9, с помощью которой он вы ключается. На конце установочного червяка укреплен маховик 12. Угломерное кольцо также может быть повернуто от руки. Для этого необходимо нажать на рычаг тормозного кольца 8.
Буссольное и угломерное кольца разделены на 60 делений. Цена каждого деления 1-00. Отсчет делений на кольцах произво дится при помощи указателей, обозначенных буквами Б (на бус сольном кольце) и У (на угломерном кольце).
Корпус отсчетного червяка с монокуляром и механизм верти кальной наводки 14 составляют верхнюю часть буссоли, вращаю щуюся относительно нижней части при вращении отсчетного чер вяка. Для быстрого поворота верхней части буссоли отсчетный чер вяк выводят из зацепления с основной шестерней поворотом экс центрика от руки при помощи отводки 22.
На правом конце расположен буссольный барабан с махович ком, на левом—подвижный угломерный барабан, они служат для снятия отсчетов. На каждом барабане нанесено 100 делений це ной 0-01 каждое. Окраска и направление оцифровки шкал бараба нов согласованы с буссольным и угломерным кольцами. При на жиме на торцовую кнопку 15 угломерный барабан освобождается от сцепления с червяком. Благодаря этому можно установить барабан на любое деление.
Монокуляр буссоли представляет собой зрительную оптическую трубу со следующими характеристиками:
Увеличение.......................................................................................... |
8х |
Поле з р е н и я ...................................................................................... |
5" (0-83) |
В поле зрения монокуляра |
имеется углоизмерительная сетка |
и дальномерные шкалы (рис. |
20), значения штрихов которых |
оцифрованы в метрах.
Для грубой наводки монокуляра в цель на его корпусе име ется визирная канавка. Наводка по вертикали производится с по мощью механизма вертикальной наводки, состоящего из оси ше стерни и червяка с барабаном 14 и отсчетной шайбы, на кото
37
рых нанесены деления угломера. На шайбе нанесены три деления красной шкалы для отсчета положительных углов и три деления
черной шкалы — для отсчета |
отрицательных |
углов. |
На бараба |
||
не— шкала на |
100 |
делений, |
оцифрованных |
двумя |
рядами цифр |
красного и черного |
цвета соответственно шайбе. |
|
|||
П е р и с к о п |
представляет собой отдельную оптическую на |
||||
садку, закрепляемую на объективе монокуляра с помощью хому
тика и зажимного винта |
в любом положении — вертикально, на |
клонно или горизонтально. |
|
Т р е н о г а снабжена |
зажимной чашкой 10, служащей гнез |
дом для закрепления шаровой пяты буссоли. |
|
П р и н а д л е ж н о с т ь |
д л я о с в е щ е н и я состоит из акку |
мулятора в футляре, патрона с лампочкой для освещения сетки буссоли и азимутальной насадки, переносной лампы для осве щения наружных шкал и штепселя с выключателем.
Рис. 20. Углоизмерительная сетка с дальномерными шкалами в поле зрения монокуляра бус
соли
А з и м у т а л ь н а я н а с а д к а предназначена для астрономи ческого ориентирования буссоли. Насадка представляет собой оп тический прибор (рис. 19,6), состоящий из визира 16, кронштейна с хомутиком 20 и уровня 18. В поле зрения визира расположена сетка (рис. 21), состоящая из большого и малого биссекторов и центрального квадрата с перекрестием. Большой биссектор исполь зуется для введения изображения звезды ip созвездия Малой Мед ведицы. Малый биссектор представляет собой шкалу, в которую вводится изображение Полярной звезды (звезды а). Центральный квадрат с биссектором используется при астрономическом ориен тировании и отмечании по Солнцу.
38
Подготовка буссоли к работе и работа на ней. При подготовке к работе буссоль устанавливается на треноге так, чтобы удобно было с нею работать в различном положении. Если нельзя исполь зовать треногу, то из нее вывертывают зажимную чашку и укреп ляют на дереве, пне или твердом грунте. Изменением наклона бус соли в чашке, используя шаровой уровень, горизонтируют прибор и закрепляют его в чашке зажимным винтом. Перед наблюдением устанавливают окуляр буссоли по глазу. После установки буссоли производится ее ориентирование.
Перископическую |
ар |
|
Зкзда а |
|||
тиллерийскую буссоль |
на |
|
||||
|
|
|||||
наблюдательном |
|
пункте |
|
|
||
ориентируют |
в |
основном |
|
|
||
направлении |
или |
по |
ди- |
|
|
|
рекционному |
углу |
назна |
|
|
||
ченного или |
выбранного |
|
|
|||
ориентирного |
направле |
|
|
|||
ния. |
|
|
|
|
|
|
Чтобы ориентировать |
|
|
||||
буссоль ПАБ-2 |
в |
основ |
|
|
||
ном направлении, пред |
|
|
||||
варительно |
вычислением |
|
|
|||
определяют |
основной |
от |
|
|
||
счет, по которому прибор |
|
|
||||
направляют |
в |
основном |
Рис. |
21. Сетка в ноле зрения визира азиму |
||
направлении. |
|
Основной |
||||
|
|
тальной насадки |
||||
отсчет вычисляют так же, |
|
|
||||
как и при ориентировании дальномера на наблюдательном пункте:
° о т сч ет = а о„ - а ор ± 3 0 - 0 0 .
После наводки монокуляра буссоли в ориентир, дирекционный угол направления на который известен, на угломерном кольце и барабанчике точных отсчетов устанавливают вычисленный по при веденной выше формуле основной отсчет. При этом желательно проверить, не сбилась ли первоначальная наводка в ориентир. Если окажется, что перекрестие монокуляра наведено в ориентир, то линия 30-00 будет направлена в основном направлении, что и требовалось сделать для ориентирования буссоли.
Ориентирование буссоли ПАБ по дирекционному углу ориен тирного направления ничем не отличается от описанного выше ориентирования этим способом стереоскопического дальномера.
Если дирекционный угол на ориентир (цель) неизвестен, то он может быть определен по магнитной стрелке ПАБ с учетом по правки буссоли по следующей формуле:
|
я=Л т -Д А rti' |
где |
я — дирекционный угол на цель; |
|
А т — буссоль направления на ориентир (цель); |
|
ДА т— поправка буссоли. |
39