

книги из ГПНТБ / Радиотехнические системы в ракетной технике
..pdfКроме того, существуют варианты отделения ЛЦ и дипольных отражателей в окрестности апогея траектории МБР и перед вхо
дом |
объектов в атмосферу. |
3. |
Пространственное расположение ложных целей и станций ра |
диопомех характеризуется направленным отделением ЛЦ и стан ций помех в космическом пространстве. Оно создается вследствие отделения головной части и ложной цели от корпуса ракеты-носи теля на расстояние, исключающее поражение двух целей одной антиракетой «Спартан».
Рис. 5.4. Траектория полета МБР «Минитмен»:
I — отделение первой |
ступени; |
2 — отделение второй сту |
||||||
пени; |
3 —отсечка |
двигателя |
третьей |
ступени; |
4 —вы |
|||
брос |
в |
космическое |
пространство |
помеховых |
средств |
|||
(ложных |
целей); |
5 —увод корпуса; |
6 — подрыв |
корпуса; |
||||
7 — ГЧ и ЛЦ в облаке диполей перед |
входом |
в атмо |
||||||
|
|
|
|
сферу |
|
|
|
|
4. Местоположение корпуса последней ступени ракеты-носи теля (его увод или подрыв для образования дополнительных ЛЦ).
В |
заключение следует отметить, |
что одним |
из средств активно |
го |
радиопротиводействия является |
ядерный |
взрыв в атмосфере, |
в результате которого возникают области повышенных электрон ных концентраций, вызывающих экранировку радиосигналов. Если взрыв произведен на сравнительно небольшой высоте, то огнен ный шар быстро охлаждается воздухом и экранировка радиосиг налов сохраняется всего несколько минут. С увеличением высоты взрыва охлаждение протекает медленнее, и, хотя столкновение электронов с частицами воздуха происходит реже, соответствую щая ионизация имеет место, и эффект экранизации сохраняется значительно дольше,
160
5.3. Комплексы помеховых средств и их испытания
Под комплексом РПД понимается набор средств активного и пассивного типов, в том числе и ГЧ, взятых в определенном соот ношении, необходимом для решения задачи преодоления ПРО с требуемой эффективностью. Понятие «комплект средств РПД» определяет конкретное количество ЛЦ и станций радиопомех, раз мещаемых на ракете.
Первые сведения о комплексировании средств прорыва ПРО в США относятся к 1963 г. Так, для БР «Поларис-А1, А2» был разра ботан и испытан комплект активных помеховых средств, в состав которого входили станции радиопомех РХ-1 (на магнетроне) и РХ-2 (на барратроне). Станции РХ-3, РХ-4 предполагалось ввести в комплект средств радиопротиводействия «Поларис/Посейдон».
Кроме того, сообщалось:
— ракеты «Поларис-АЗ» оснащены средствами преодоления ПРО, содержащими наряду со станциями радиопомех пассивные ложные цели и узкодиапазонное радиопоглощающее покрытие ГЧ; —■ракеты «Титан-2» также оснащались средствами преодоле
ния системы ПРО;
— ракеты «Минитмен-2» с головной частью Мк.ПА имели на бор помеховых средств, ГЧ имела РПП с аблирующим покрытием.
В 1966 г. в США начались работы по созданию комплексов средств прорыва ПРО МБР «Минитмен-2, 3».
Предполагалось внедрить в промышленное производство ком плект помеховых средств Мк.1 для защиты головных частей МБР «Минитмен-2, 3».
Элементы комплекта Мк.1 размещаются в специальном контей нере, устанавливаемом на МБР. Контейнер от корпуса последней ступени отделяется с помощью РДТТ с тремя скошенными сопла ми. При включении РДТТ контейнер раскручивается и отсоеди няется от узла крепления. Осевая составляющая тяги РДТТ обе спечивает отделение контейнера от ракеты, после чего включается другой РДТТ, выводящий контейнер на требуемую траекторию. Оба РДТТ относятся к типу разгонных двигателей VIP.
Вращение контейнера обеспечивает не только его стабилиза цию, но и последующий разброс помеховых средств, находящихся в контейнере, и, в частности, дипольных отражателей с заданной ско ростью рассеивания.
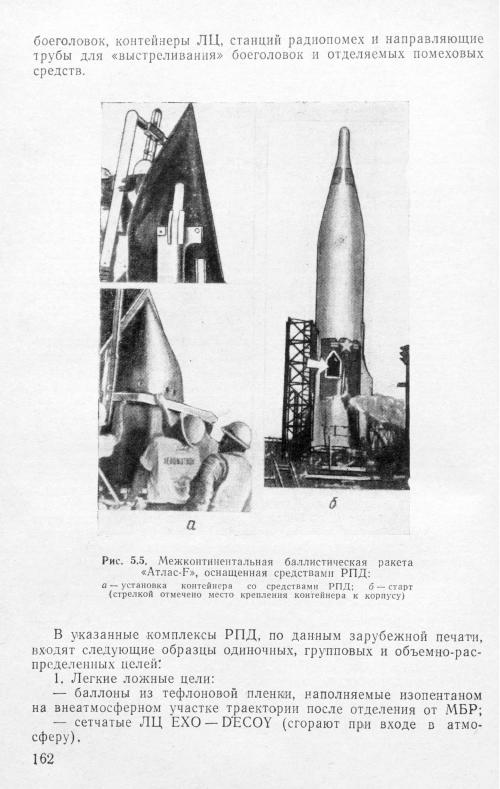
В 1963 г. по программе «Абрее» на Западном испытательном полигоне начались запуски МБР «Атлас-F». Для размещения ком плекта испытываемых помеховых средств на ракетах использовал ся специальный контейнер (рис. 5.5). Позднее МБР «Атлас-F» на испытаниях помеховых средств оснащалась экспериментальной го ловной частью RMP-B (рис. 4.12), представляющей собой цилиндр диаметром 2,13 м и длиной 2,03 м из алюминиевого сплава, один из торцов которого закрыт коническим теплозащитным обтекате лем из стеклопластика. В корпусе этой ГЧ размещались макеты
161
2. Тяжелые ложные цели:
—металлическая ЛЦ ENDO— DECOY;
—ложная цель HAPDEC с глубоким проникновением в атмо сферу (предназначена для оснащения МБР, наносящих удар по точечным подземным целям);
—ложная цель MANDEC, имитирующая маневр ГЧ при входе
ватмосферу;
—ложная цель Мк.6, имитирующая плазмообразование вокруг
ГЧ;
—ложные цели STEMS, имитирующие боеголовки МИРВ на атмосферном участке полета;
—ложные цели OPADEC для имитации излучения ГЧ в ПК- и оптическом диапазонах;
— дипольная логопериодическая пассивная антенная решетка на проводящем конусе, работающая в метровом и сантиметровом диапазонах.
3. Дипольные отражатели в виде металлических лент, фольги, металлизированного стекловолокна и т. п.
Для сбрасывания дипольных отражателей перед входом в плот ные слои атмосферы сконструированы автоматы Мк.2, в которых используются небольшие ракеты для выстреливания диполей в плоскости, перпендикулярной траектории ГЧ.
4. Групповые цели—• ЛЦ, ГЧ с привязными диполями (в виде прядей на гибком тросе), уголковыми отражателями и надувными баллонами.
Для испытаний перечисленных пассивных средств преодоления ПРО наряду с боевыми МБР применялись также и баллистические ракеты «Афина», «Аджена-Н».
5.4. Образование ложных целей на траектории
На внеатмосферном участке полета ложные цели располагают ся вдоль траектории головной части. При этом расстояния (ди станция) между целями в зоне ПРО выбираются из условия непоражения двух соседних целей взрывом ядерной боеголовки анти ракеты.
Для получения необходимой траектории входа в плотные слои атмосферы при заданном расположении целей в пространстве по меховые средства выбрасываются с расчетными скоростями и на правлениями в момент (или после) прекращения работы двига тельной установки последней ступени МБР.
Ошибки в скоростях и направлении выброса понижают эффек тивность решения задачи преодоления системы ПРО. Поэтому не обходима оптимизация параметров выброса целей по двум основ ным признакам: минимизации отклонения точек падения ложных целей и головной части, во-первых, и получения требуемой дистан ции между целями в зоне ПРО, во-вторых.
Достаточно общий подход решения этой задачи заключается в преобразовании данных об относительном положении ЛЦ и ГЧ в
163
зоне ПРО в составляющие скорости выброса для момента отделе ния целей от борта МБР. Результаты экспериментальных пусков ракет со средствами преодоления ПРО показали, что требуемые скорости выброса молено определять по линеаризованным уравне ниям их относительного движения. Диапазон скоростей выброса ложных целей, допускающий линеаризацию, составляет 0—150 м/сек
Рассмотрим задачу выброса ложной цели в плоскости траекто рии МБР при следующих предположениях:
— цель отделяется от ракеты со скоростью не более 150 м/сек; ■— вектор скорости выброса цели ориентирован относительно вектора скорости ракеты (или местной горизонтали) произвольным
образом;
—силы отдачи, воздействующие на корпус МБР при выбросе ЛЦ, траекторию головной части не искажают;
—гравитационное поле Земли симметрично;
—цели не подвержены действию сил лобового сопротивления;
—масса ЛЦ ничтожно мала по сравнению с массой головной
части.
На рис. 5.6 изображены системы декартовых координат, исполь зуемые в задаче:
— XjYi — система |
неподвижных геоцентрических координат; |
||||
— X2Y2 |
— система |
подвижных геоцентрических координат, вра |
|||
щающаяся |
с угловой |
скоростью |
d?/dt, равной угловой |
скорости |
|
движения ракеты (головной части) по траектории; |
в центре |
||||
— X3Y3 |
— система |
координат |
с началом, |
лежащим |
|
масс ГЧ, и осью Х3, направленной вдоль местной горизонтали. |
|||||
Ложная |
цель выбрасывается |
в момент |
отсечки двигателя со |
||
скоростью VB под углом а относительно вектора скорости МБР V0. Движение ложной цели рассматривается в системе координат X3Y3.
Уравнения движения ложной цели относительно невращающейся инерциальной системы координат X1Y1 записываются в следую щей форме:
(12Х, , |
fM |
|
А |
[5.1] |
||
dt2 |
+ |
7 |
Г Х , = ° , |
|||
|
|
|
|
|
|
|
|
Й2У1 |
, |
I м |
А |
[5.2] |
|
|
|
dt2 |
+ |
— |
У1= а |
|
где Р! = (х? + у^)',! — радиус-вектор выброшенной ЛЦ;
{М— произведение универсальной гравитационной постоянной на массу Земли.
Для дальнейшего анализа удобно применить к выражениям [5.1, 5.2] ортогональные преобразования:
— поворот осей на угол tp
Xj = х2cos 9 + у2sin?,
[5.3]
У1 = — х2sin? + y2cosp,
164
УгЛз
0 5
СЛ
— параллельный перенос осей |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
) х2= |
х3> |
|
|
|
|
|
|
[5.4] |
||||
|
|
|
|
|
|
1 Уг = |
Уз + |
Б |
|
|
|
|
|
|||||
где г — текущий |
|
|
|
|
|
|
|
|
|
|
||||||||
радиус-вектор |
|
начала координат X3Y3. |
|
|
||||||||||||||
Используя замену переменной t на ср, имеем |
|
|
|
|||||||||||||||
|
|
|
|
|
|
_d_ _ _ d ___ |
|
|
|
|
|
|
[5.5] |
|||||
|
|
|
|
|
|
dt |
|
dtp |
|
dt |
’ |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
d2x |
__ d2x |
/ |
dtp |
\ 2 |
dx |
d2tp |
|
|
|
[5.6] |
|||||
|
|
|
"dt2" |
|
"dtp2^ |
\~ dt~"J |
“'t" ' d |
? ' ”dt2"> |
|
|
||||||||
|
|
|
|
|
|
|
||||||||||||
г д е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dip __ |
r0V 0 cos Qp |
|
|
|
|
|
[5.7] |
|||||
|
|
|
|
|
|
dt |
|
|
|
|
v2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
d2<p |
|
2rQVoCos2@0 |
/ |
щ |
у |
|
|
|
[5.8] |
||||||
|
|
|
"dt2"— |
|
|
? |
|
|
V5d?"/ |
' |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
Отсюда можно получить уравнения движения |
цели |
в |
системе |
|||||||||||||||
координат X3Y3: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d2x3 |
|
|
fM |
' |
г4 |
|
|
\ |
___ 2 _ j W |
dx3 \ . |
||||||||
dtp2 |
|
|
|
I |
|
|
|
|
J |
|
|
|
|
|
|
|
||
|
|
р |
|
|
I q V q c o s 2 0 |
о |
|
Х з |
|
г |
d<p |
\ У з |
+ dtp |
/ |
+ |
|||
|
|
|
|
|
|
+ 2 ^ g - = |
0, |
|
|
|
|
|
(5.9] |
|||||
d2y3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dtp2 |
|
|
Pl |
|
rgVo cos2 0 O/ |
Уз |
|
r |
dtp |
Vх » |
dtp |
j |
|
|||||
|
|
|
|
|
|
- 2 Tff + |
‘4 = ° - |
|
|
|
|
Ц.ю] |
||||||
В выражении [5.10] |
|
m |
|
|
|
Г4 |
|
|
|
|
|
|
||||||
A |
d2r |
|
|
r |
|
|
|
|
|
|
|
|
|
[5.П] |
||||
d?2 |
|
|
|
pj |
|
roVg cos2 0 O |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
где значения |
|
|
и -^-определяются видом траектории МБР и мо |
|||||||||||||||
гут быть рассчитаны по общеизвестным формулам.
Поскольку скорость отделения ЛЦ и относительное расстояние между ней и головной частью малы по сравнению с величиной век тора скорости и радиус-вектором ГЧ на траектории, т. е. Хз<С(Уз+
+ г ) 2 |
и У з < С г , |
то с учетом р3 ~ г |
выражения [5.9, 5.10 и 5.11]упро |
|||||||
щаются: |
|
|
|
|
|
|
|
|
|
|
d2x3 |
1 |
fMr |
|
2 |
dr |
(y« + |
dx3 |
+ |
2 i § - : 0, [5.12] |
|
dp2— |
|
|
|
d9 |
dtp |
|||||
|
rovo cos2 0o |
|
|
|
|
|
|
|
||
|
d".V:l |
l \ |
fMr |
|
Уз |
2 |
dr |
/ |
+ M l ) |
|
|
dtp2 |
|
roVo cos2 ©о |
r |
dtp |
V |
+ |
dtp J |
||
|
|
|
- 2 |
dx3 |
+ |
A — 0, |
|
|
|
[5.13] |
|
|
|
|
dtp |
|
|
|
|
|
|
166
где
ДД |
/, |
<Mr |
2 |
dr у |
[5.14] |
|
d<f 2 |
{ |
rgVo COS2 0 O |
r |
d* / |
||
|
||||||
Начальными условиями |
для дифференциальных уравнений |
|||||
{5.12 и 5.13], описывающих движение ЛЦ относительно ГЧ, будут:
х3(0) = уз (0) = 0 ,
(°)= “V7 rocos (® + *в),
(0)= г0 sin (0 + ав).
Для грубой оценки скоростей и направлений выброса ЛЦ мож но положить
fMr |
—---- — |
^ |
' |
rovocos2 ®о |
г d<? |
|
|
|
|
|
В этом случае выражения [5.12 и 5.13] с учетом [5.14] существенно упрощаются:
|
|
|
|
[5.16| |
| & |
_ 2 4 ^ |
+ ф С = |
о, |
[5.17] |
dу2 |
d'f |
dcf2 |
’ |
|
где г зависит от текущей координаты <р.
Система линейных уравнений [5.16 и 5.17] после преобразований сводится к линейному дифференциальному уравнению третьего по-
рядка с правой частью, равной — d2r Общее решение этого уравне ния может быть получено .методом вариации произвольных посто
янных. Необходимо |
лишь |
ввести в [5.17] |
аппроксимацию измене- |
|
. |
|
d2r |
в зависимости |
от угловой дальности «р. |
кия графика величины |
|
|||
Необходимые значения VB и ав определяются, как указывалось выше, противоречивыми условиями:
—условием непоражения двух целей одновременно взрывом боеголовки антиракеты на дальнем рубеже «активной селекции»;
—условием минимизации отклонения точек падения ЛЦ от
точки прицеливания ГЧ (рис. 5.6 — оси Х3, Y3 в точке падения ГЧ, рис. 1.10 — семейство траекторий одинаковых дальностей).
Минимизация вероятности перехвата ГЧ, учитывающая оба условия, определяет оптимальные скорости и направления выброса ложных целей. Необходимо отметить характер относительных тра екторий ложных целей, и головной части. Если ложные цели выбрасываются под углами ав~90°, то, двигаясь по относительным траекториям, они отстают от ГЧ прямо пропорционально скорости
167
выброса ЛЦ. Выброс под углами ав~270° выводит ложные цели на эллиптические траектории с опережением ГЧ. На рис. 5.7 показано изменение относительного расстояния между целями при различ ных скоростях выброса (для ав~270°).
Рис. 5.7. Изменение относительного расстояния между целями в системе координат Х3, Y3 от вре мени полета
Определение вероятности попадания целей в заданный объект проиллюстрируем на следующем примере. Пусть известно ооложе-
Рис. 5.8. К определению вероятности попадания в прямоугольник
ние эллипса рассеивания относительно объекта прямоугольной формы. Размеры объекта заданы относительно центра рассеивания цели координатами х3ь х32 (рис, 5.8) и zb Z2. Для вычисления иско-
168
мой вероятности найдем вероятность попадания цели в полосу А. Плотность распределения случайной величины, подчиняющейся нормальному закону, имеет вид
f 00 = |
1 |
ехр |
(х — а)2 |
~ |
[5.18] |
У 2то |
2с2 |
J ’ |
где а = Е(х) — математическое ожидание величины отклонения ЛЦ от центра рассеяния ГЧ.
При а = 0 вероятность попадания в полосу А |
|
||||
|
Ра = |
2 |
|
[5.19] |
|
, — |
у |
_ |
|
|
|
где Ф (у) = ] / — |
J |
е |
2 dy |
— интеграл вероятности. |
[5.20] |
|
о |
|
|
образом вероятность рв попадания в |
|
Вычислив аналогичным |
|||||
полосу В и используя теорему умножения вероятностей для неза висимых событий, определим требуемую вероятность попадания
Pi |
[5.21] |
Для объектов, имеющих поверхность сложной конфигурации, возможна ее аппроксимация различными прямоугольниками. В этом случае вероятность попадания целей в заданный объект на ходится как сумма вероятностей попадания в отдельные элементы.
5.5. Демаскирующее влияние корпуса ракеты
При прорыве через систему ПРО серьезное значение, по мне нию американцев, приобретает местоположение корпуса последней ступени МБР. Дело в том, что после отделения головной части и средств преодоления (ЛЦ, дипольных отражателей) корпус послед ней ступени продолжает полет почти по той же траектории, что и ГЧ, вплоть до вхождения в плотные слои атмосферы. Этим соз даются благоприятные условия для дальнего обнаружения слож ной цели и .ее сопровождения радиолокаторами ПРО (поскольку средняя ЭПР у корпуса ракеты примерно на порядок больше, чем у ГЧ). Кроме того, полет корпуса последней ступени вслед за ГЧ
и ложными целями |
не исключает догона отделившихся |
ГЧ и ЛЦ, |
а следовательно, и |
их соударения. Последнее может |
привести к |
разрушению ГЧ и ЛЦ, изменению параметров их эллиптической траектории, вращению ложных целей с отличными от ГЧ угловы ми скоростями и, как следствие, к распознаванию головной части системой № 0 .
В э:ой связи американские специалисты предлагают:
— изготовлять последнюю ступень МБР из неметаллических материалов с целью снижения эффективной площади рассеяния (в
169