

Примеры структурных групп
n=2, P1=3. С таким набором звеньев и кинематических пар структурную группу принято называть структурной группой второго класса. Их 5 видов (рис. 5)

Рис.5. Структурные группы 2-ого класса.
Структурная группа второго класса первого вида состоит из двух звеньев и трех вращательных кинематических пар (поэтому ее иногда обозначают ВВВ). Другие виды структурной группы образуются из первого путем замены одной или двух вращательных кинематических пар на поступательные (в обозначениях буквами это выглядит так: ВПВ, ВВП, ВПП, ПВП). Все три вращательные кинематические пары нельзя заменить на три поступательные, так как получится одно звено из трех деталей.
Можно заметить, что определяя степень подвижности структурной группы, мы подразумеваем присоединение внешних кинематических пар к стойке, не обозначая (не рисуя) стойку.
2. n=4,P1=6. С таким набором звеньев и кинематических пар различают группы третьего (рис. 6а) и четвертого (рис. 6б) класса. Класс группы равен числу внутренних кинематических пар, образующих самый сложный замкнутый контур.
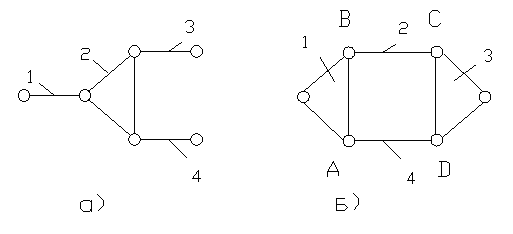
Рис.6 Структурные группы третьего (а) и четвертого (б) классов.
Треугольник 2 на рис. 6а и 1 и3 на рис. 6б считается одним звеном, которое хотя и состоит из трех элементов, но образует жесткую систему. Четырехугольник АВСDна рис. 6б не может образовать жесткую систему и считается состоящим из четырех звеньев.
На рис. 6а самый сложный замкнутый контур-треугольник и поэтому группа 3-его класса. На рис. 6б внутренний контур-четырехугольник и поэтому группа относится к 4-му классу.
3.n=6,P1=9. Здесь можно привести пример структурной группы третьего класса (рис.7),
где самый сложный внутренний замкнутый контур состоит из 3-х кинематических пар.

Рис. 7. Структурная группа третьего класса.
Теперь разложим схему механизма рис. 4 на структурные группы. Отделение структурных групп выполняют в таком порядке, чтобы степень подвижности оставшейся цепи не менялась. Поэтому, можно выделить структурную группу 2-ого класса, состоящую из звеньев 4-5 и кинематических пар E,F,H. Далее идет структурная группа 2-ого класса, состоящая из звеньев 2-3 и кинематических парB,C,D. И остался механизм 1-ого класса звено 1, кинематическая пара А и стойка.
Т.е., в соответствии с правилом Ассура образования плоских механизмов, можно сказать, что к механизму первого класса звено 1 (I1), последовательно присоединяются две структурные группы второго класса звенья 2-3 (II2,3) и звенья 4-5 (II4,5). Принято записывать формулу строения механизма в следующем виде (римскими цифрами обозначают класс механизма и структурных групп)
I1← ii2,3← ii4,5
Класс механизма определяется наивысшим классом структурных групп, входящих в механизм. Таким образом схема на рис. 4 относится к механизму II класса.
Определение класса и формулы строения механизма позволяют выбрать рациональный метод кинематического и силового анализа механизма. Например, кинематический анализ начинают с механизма I класса и далее переходят к структурным группам в порядке их присоединения, а силовой анализ начинают с последней структурной группы и затем в соответствии с формулой строения механизма переходят к другим группам, завершая силовой расчет расчетом ведущего звена. По классу механизма выбирают метод кинематического и силового расчета структурных групп соответствующего класса.
В заключении этого раздела заметим, что на структурной схеме механизма обязательно нужно указать ведущее звено, так как от этого зависит и класс, и формула строения механизма, а, следовательно, и порядок кинематического и силового расчета.