

1. Абстрактные автоматы
Определение. Абстрактным автоматом Милиназывается преобразователь, представимый пятёркой
S=<Z,W,A,,>,
где Z– входной алфавит {z1,z2, …,zr},
W– выходной алфавит {w1,w2,…,wp},
A – алфавит состояний {a1,a2,…,at},
– функция переходов AxZА,
– функция выходов AxZW.
Если, кроме того, определено начальное состояние автомата a0(a0– символ изА), то говорят обинициальном автомате Мили.
Семантика: автомат функционирует в дискретном времени. В лю-бой момент времени он находится в некотором состоянииaiиз множест-ваA, и на его вход поступает входной сигналziиз множестваZ. В зави-симости от состояния и входного сигнала в следующий момент автомат переходит в новое состояниеaj, определяемое функцией перехода,aj=(ai,zi), при этом на его выходе формируется выходной сигналw=(ai,zi) (рис.1.1). В инициальном автомате в начале функционирова-ния автомат находится в состоянииa0.
А втомат
МилиPпредставляется
матрицей переходов и матрицей выходов,
описывающими соответствующие функции.
втомат
МилиPпредставляется
матрицей переходов и матрицей выходов,
описывающими соответствующие функции.
Пример 1. Автомат задан на множествах входовZ={z1,z2,z3}, состоянийA={a1,a2,a3,a4,a5,a6} и выходовW={w1,w2}. Его функционирование описывается матрицами переходов и выходов, приведёнными в табл.1.1 и 1.2.
|
Таблица 1.1 |
|
Таблица 1.2 | ||||||||||||
|
|
a1 |
a2 |
a3 |
a4 |
a5 |
a6 |
|
a1 |
a2 |
a3 |
a4 |
a5 |
a6 | |
|
z1 |
a3 |
a5 |
a6 |
a6 |
a1 |
a5 |
z1 |
w1 |
w1 |
w2 |
w1 |
w2 |
w1 | |
|
z2 |
a1 |
a6 |
a4 |
a4 |
a4 |
a1 |
z2 |
w1 |
w1 |
w1 |
w1 |
w1 |
w1 | |
|
z3 |
a5 |
a1 |
a3 |
a2 |
a5 |
a3 |
z3 |
w1 |
w1 |
w2 |
w2 |
w2 |
w1 | |
Автомат Мили может быть также представлен в виде объединённой матрицы. В этом случае каждая клетка матрицы состоит из двух частей, в одной из которых записывается следующее состояние (функция (ai,z)), во второй части – выход (функция(ai,z)).
|
Таблица 1.3 | ||||||
|
|
a1 |
a2 |
a3 |
a4 |
a5 |
a6 |
|
z1 |
a3w1 |
a5w1 |
a6w2 |
a6w1 |
a1w2 |
a5w1 |
|
z2 |
a1w1 |
a6w1 |
a4w1 |
a4w1 |
a4w1 |
a1w1 |
|
z3 |
a5w1 |
a1w1 |
a3w2 |
a2w2 |
a5w2 |
a3w1 |
Автомат Мили может быть описан в виде графа. Вершинам этого графа сопоставлены состояния, дугам – переходы. При этом на каждой дуге записывается значение входа, определяющего этот переход, и значение выхода на этом переходе. Эта пара вход-выход называется весом дуги. Для рассмотренного автомата граф имеет вид как на рис.1.2

Рис.1.2
Автоматом Мураназывают автомат, в котором функция выходов зависит только от состояния, то есть для него функция выходов автомата::AW.
Пример2. Автомат Мура задан на тех же множествах, что и автомат в примере 1, а его функционирование описывает табл. 1.4.
В графе автомата Мура дуги взвешиваются только значением соответствующего входа, значение выходов приписываются его вершинам.
|
Таблица 1.4 | ||||||
|
|
w a1 |
w1 a2 |
w2 a3 |
w1 a4 |
w2 a5 |
w1 a6 |
|
z1 |
a3 |
a5 |
a6 |
a6 |
a1 |
a5 |
|
z2 |
a1 |
a6 |
a4 |
a4 |
a4 |
a1 |
|
z3 |
a5 |
a1 |
a3 |
a2 |
a5 |
a3 |
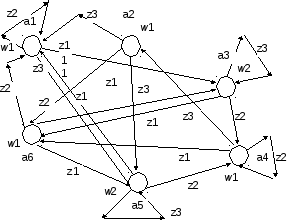
Рис.1.3
Реакция автомата в состоянии aiна входное словоz* определяется по таблицам переходов и выходов. Для последнего примера реакцией автомата в состоянииa2 на словоz1z2z1 будет словоw2w1w1.