

электротехника Курс лекций / 18
.pdfОбеспечение хороших пусковых свойств предусматривается конструкцией двигателя. В частности, существенное значение имеет форма паза ротора, в который укладывается короткозамкнутая обмотка. На рис. 6.2.22 показаны примеры таких пазов. Такая особенность конструкции обмотки ротора ограничивает пусковой ток ( Iпуск =( 3,5 ÷5,0 )Iном) и обеспечивает большой пусковой
момент ( Мпуск =( 2 ÷3 )Мном).
Рис. 6.2.22. Формы пазов ротора с короткозамкнутой обмоткой
Регулирование частоты вращения
Частота вращения ротора асинхронного двигателя определяется частотой вращения магнитного поля (синхронной частотой вращения). При этом их ве-
личины различаются незначительно (номинальное скольжение sном=0,01÷0,1). Синхронная частота вращения в соответствии с (6.2.1) определяется числом пар полюсов обмотки статора и частотой тока в обмотке:
n0 |
= |
60 f |
. |
(6.2.17) |
|
||||
|
|
p |
|
|
Таким образом, для регулирования частоты вращения асинхронного двигателя можно менять число полюсов обмотки, либо частоту тока в ней.
Изменение числа полюсов (полюсное регулирование) возможно лишь в специальных многоскоростных асинхронных двигателях, у которых конструкция обмотки статора предусматривает возможность ее переключения и измене-
Модуль II. Магнитные цепи и электромагнитные устройства |
Лекция 16 |
11

ния числа полюсов вращающегося магнитного поля. Например, при переключении обмотки с числа пар полюсов p=1 на p=2 синхронная частота вращения уменьшается в 2 раза. Механическая характеристика изменяется, как показано на рис. 6.2.23.
Рис. 6.2.23. Механические характеристики асинхронного двигателя при полюсном регулировании
При неизменном моменте нагрузки Мнагр рабочая точка смещается из 1 в 2, т.е. частота вращения уменьшается приблизительно в 2 раза. Такой способ регулирования многоскоростных асинхронных двигателей позволяет изменять частоту вращения ступенчато, при этом количество ступеней ограничено (2-3).
Изменение частоты тока позволяет регулировать частоту вращения плавно и в более широком диапазоне. Такой способ называется «частотным регулированием». Для частотного регулирования двигатель подключается к полупроводниковому преобразователю частоты ПЧ (рис. 6.2.24), который позволяет изменять частоту тока по заданному алгоритму, либо по сигналу системы управления СУ.
Пропорционально частоте тока меняется синхронная частота вращения магнитного поля. При этом механическая характеристика двигателя меняется, как показано на рис. 6.2.25, а рабочая точка и частота вращения ротора плавно
Модуль II. Магнитные цепи и электромагнитные устройства |
Лекция 16 |
12
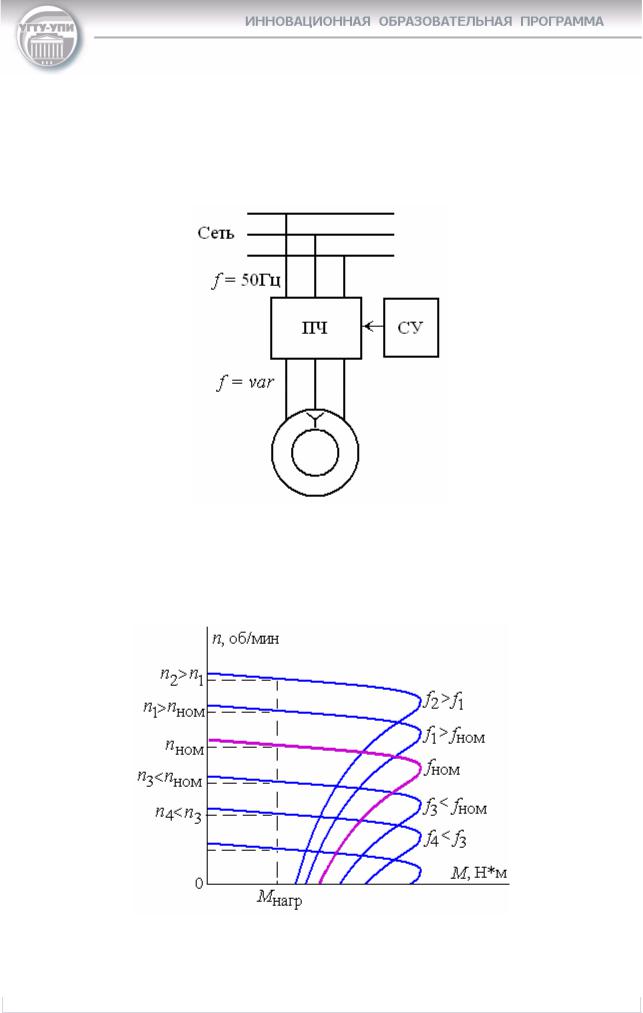
смещаются в направлении изменения частоты тока. Плавное изменение частоты вращения и более широкий диапазон изменения определяют преимущества частотного регулирования асинхронного двигателя.
Рис. 6.2.24. Схема включения асинхронного двигателя с частотным регулированием
Рис. 6.2.25. Механические характеристики асинхронного двигателя при частотном регулировании
Модуль II. Магнитные цепи и электромагнитные устройства |
Лекция 16 |
13

Заключение
1.Механическая характеристика – это зависимость частоты вращения двигателя от вращающего момента на валу. С изменением момента нагрузки от холостого хода до номинального режима частота вращения уменьшается. Номинальная частота вращения близка к синхронной.
2.Преобразование энергии в асинхронном двигателе сопровождается потерями энергии. В асинхронном двигателе можно выделить четыре составляющих потерь: потери в обмотке статора, определяемые ее сопротивлением и током статора; магнитные потери в магнитопроводе, определяемые перемагничиванием магнитопровода статора и ротора; потери в обмотке ротора, определяемые ее сопротивлением и током ротора; механические потери, определяемые трением вращающихся частей. К.п.д. асинхронного двигателя в зависимости от мощности может быть 60÷90%.
3.Паспортные данные асинхронного двигателя определяют его номинальный режим работы, позволяют рассчитывать характеристики, анализировать режимы его работы.
4.Пуск асинхронного двигателя сопровождается значительным пусковым током и небольшим пусковым моментом. Обеспечение хороших пусковых свойств предусматривается конструкцией двигателя. В частности, существенное значение имеет форма пазов ротора, в которые укладывается короткозамкнутая обмотка.
5.Регулирование частоты вращения асинхронного двигателя может осуществляться двумя способами: изменением числа полюсов (полюсное регулирование), изменением частоты тока статора (частотное регулирование).
Полюсное регулирование возможно лишь в специальных многоскоростных асинхронных двигателях, у которых конструкция обмотки статора предусматривает возможность ее переключения и изменения числа полюсов вращающегося магнитного поля.
Модуль II. Магнитные цепи и электромагнитные устройства |
Лекция 16 |
14

Для частотного регулирования двигатель подключается к полупроводниковому преобразователю частоты, который позволяет изменять частоту тока по заданному алгоритму, либо по сигналу системы управления.
Контрольные вопросы
Механическая характеристика АД
1)Зависимость частоты вращения двигателя от вращающего момента на валу
2)Зависимость механической нагрузки на валу от напряжения источника
3)Масса и габариты устройства
Изменится ли частота вращения АД при уменьшении момента нагрузки на валу в 2 раза по сравнению с номинальным моментом?
1)Частота вращения уменьшится в 2 раза.
2)Частота вращения увеличится.
3)Частота вращения не изменится.
Как соотносятся частота вращения холостого хода (n0) и номинальная частота вращения (nном) АД?
1)n0 > nном
2)n0 < nном
3)n0 = nном
Что такое холостой ход АД ?
1)Режим работы АД при частоте вращения ротора, равной синхронной.
2)Режим работы АД при отключенной обмотке статора.
3)Режим работы АД при частоте вращения ротора, равной нулю.
Модуль II. Магнитные цепи и электромагнитные устройства |
Лекция 16 |
15
Указать график механической характеристики асинхронного двигателя
Основные составляющие потерь энергии в АД:
1)Потери в обмотке статора, магнитные потери в магнитопроводе, потери в обмотке ротора, механические потери;
2)Электрические потери в обмотках, магнитные потери в магнитопроводе, потери в приемнике;
3)Электрические потери в обмотках и механические потери.
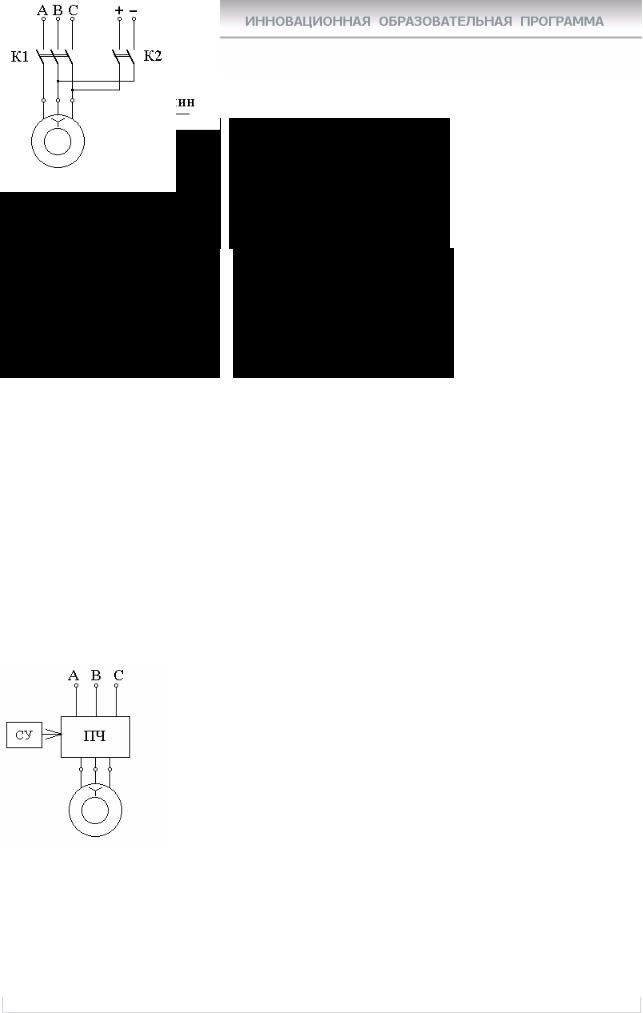
Указать схему включения асинхронного двигателя для частотного управления.
|
|
|
|
|
|
|
|
|
|
Модуль II. Магнитные цепи и электромагнитные устройства |
Лекция 16 |
|||
16

Разработано по плану инновационной образовательной программы УГТУ-УПИ.
Коллектив разработчиков кафедры «Электротехника и электротехнологические системы»
УГТУ–УПИ
Сарапулов Федор Никитич – заведующий кафедрой, профессор, д.т.н.; Проскуряков Валерий Степанович – доцент, к.т.н.;
Соболев Сергей Владимирович |
– доцент, к.т.н.; |
Федотова Лидия Адамовна |
– доцент, к.т.н.; |
Хрулькова Наталья Вячеславовна – ассистент.
Кафедра «Электротехника и электротехнологические системы» УГТУ–УПИ
620002, г. Екатеринбург, ул. Мира, 19. Тел. 375-47-51, E-mail: vpros@mail.ru
Модуль II. Магнитные цепи и электромагнитные устройства |
Лекция 16 |
17