

Презентация_диплома_С.А.Лобов
.pdfРАЗРАБОТКА ВЫЧИСЛИТЕЛЬНОЙ ПРОГРАММЫ РЕШЕНИЯ ДИФФЕРЕНЦИАЛЬНОЙ ИГРЫ СБЛИЖЕНИЯ-УКЛОНЕНИЯ «К МОМЕНТУ»
Лобов С.А.

|
|
Постановка задачи. |
|
|
|||
Рассматривается |
дифференциальная игра с |
||||||
динамикой: |
|
|
|
|
|||
dx |
g x B x u C x v, |
|
|
||||
dt |
|
|
|||||
|
|
|
|
|
|
, t 0,T . |
|
x R |
n |
, u P R |
n |
, v Q R |
n |
||
|
|
|
|||||
На правую часть дифференциального уравнения накладываются условия, обеспечивающие существование решения динамической системы.
(1) Красовский Н.Н., Субботин А.И.
Позиционные дифференциальные игры. М.: Наука, 1974. 456 с.
Качество конфликтно управляемого процесса
оценивается функционалом
x min x t ,
t 0,T
где x – функция, удовлетворяющая локальному условию Липшица.
x min,
u
x max.
v
Будем считать дифференциальная игру решенной, если построена ее функция цены .

Аппроксимационная схема построения функции цены
Рекуррентная формула
(t |
i 1 |
, x) |
sup |
|
max |
max |
{co |
|
(t |
, y) |
( p, g(x) |
||
|
|
y O( x, ( x) |
) |
j,k |
p co |
(t |
,x, y, j ,k ) |
i |
i |
|
|||
|
|
|
|
|
|
|
|||||||
|
|
|
i |
|
|
|
i |
|
|
|
|
|
|
p, B(x)u( j ) p,C(x)v
tN , x x .
(k )
) p, x y }, i N , N 1, |
,1. |
•Тарасьев А.М., Успенский А.А., Ушаков В.Н. Аппроксимационные схемы и конечноразностные операторы для построения обобщенных решений уравнений Гамильтона-Якоби //Изв. РАН Техн. Кибернетика. 1994. №3. С. 173-185
• |
co |
|
y |
субдифференциал выпуклой |
|||
|
|
||||||
|
оболочки, вычисленный в точке у . |
||||||
• |
Символом |
co |
|
ti ,x, y, j,k |
обозначено |
||
|
|||||||
пересечение субдифференциала выпуклой оболочки с конусом линейности гамильтониана, определяемого паройu j , v k .
• x - константа Липшица гамильтониана.

• Введем гамильтониан динамической системы
H x, s min max s, g x B x u C x v
s, g x B x u C x v . u P v Q
. u P v Q
• Конус линейности гамильтониана – множество, где гамильтониан линеен по последнему аргументу. В нашем случае конус определяется вершинами u j , v k многогранников P и Q.
Алгоритм программы
•Задаются начальные данные
•Инициализируются сетки для каждого шага по времени t
•Задается значение функции цены на сетке в момент t=T
•Для каждой итерации выполняются шаги [4a-4f]
–Для каждой точки сетки х находятся точки из O(x,r), r (x)dt
–Строится выпуклая оболочка полученных точек
–Строится субдифференциал для каждой точки
–Строятся конусы линейности гамильтониана
–Находится пересечение субдифференциала с конусами линейности
–Находим значение V(ti-1,x) по формуле
•Возвращаемся к шагу 4
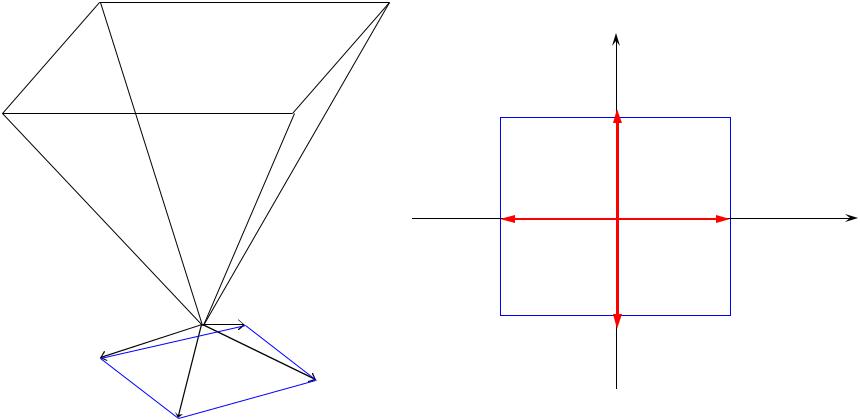
Алгоритм построения выпуклой
оболочки “Quick Hull”
•Строится начальная выпуклая оболочка
•Для каждой грани 1)Находится наиболее отдаленная точка от
данной грани в сторону внешней нормали 2)Если точка существует
a)Удаляются грани, которые видны из найденной точки
b)Строятся грани, содержащие эту точку и точки, лежащие на ранее построенной выпуклой оболочке.
Алгоритм
начальной выпуклой оболочки
•Строится начальная грань 1)Находятся точки с максимальным значением по каждой
координате, из полученных точек находятся лежащие на наибольшем расстоянии друг от друга.
2)Если число точек меньше размерности пространства, то добавляем точки аналогичным образом с минимальным значением координат.
3)По первым четырем точкам строится грань.
•Находится наиболее отдаленная точка от полученной грани
•Используя найденную точку и грань, строится начальная выпуклая оболочка
Алгоритм построения субдифференциала