

СОТ
.pdf161
Глава III. ПРИМЕНЕНИЕ СОТ
9. Правила выбора телевизионных камер
9.1. Зоны наблюдения телевизионных камер
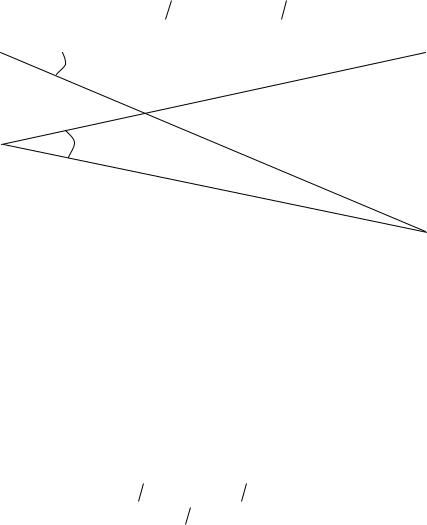
Телевизионная камера воспринимает изображение пространства из одной точки, что обусловливает ее секторный обзор. При этом создается секторная зона наблюдения с различными углами зрения в вертикальной и горизонтальной плоскостях из-за прямоугольного вида фотоэлектрическо-
го преобразователя (ПЗС-матрицы), размер которой по горизонтали при-
мерно в 1,3 раза больше, чем по вертикали (рис. 9.1) (в картинной плоскости).
G
V
Объект
ПЗС-матрица
v |
Объектив |
L |
|
|
g
Рис. 9.1. Зависимость размеров видимого сектора от его удаления от камеры (в картинной плоскости)
Размер контролируемого участка вместе с характеристиками обна-
руживаемого объекта определяют конкретные требования к параметрам оптической системы телекамеры и еѐ размещению на охраняемом объекте.

162
Наиболее важным критерием при выборе ТВК является фокусное расстоя-
ние объектива. При известном формате матрицы фокусное расстояние бу-
дет задавать углы контролируемого пространства, охватываемого ТВК по горизонтали и по вертикали. Такие области охвата пространства наблюде-
ния называют горизонтальным (рис. 9.2) и вертикальным (рис. 9.3) угло-
выми полями зрения камеры. Зона охвата ТВК характеризуется длиной L,
которую часто называют «расстоянием до объекта наблюдения».
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Объектив |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g |
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
L |
|
|
|
|
|
|
||
|
ПЗС-матрица |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Объект |
||||
|
|
|
|
|
|
Рис. 9.2. Поле зрения ТВК по горизонтали |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Объектив |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
V |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
ПЗС-матрица |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Объект |
||||
|
|
|
|
|
|
Рис. 9.3. Поле зрения ТВК по вертикали |
|||||||||||
|
|
Как видно из рис. 9.2, отношение фокусного расстояния объектива f |
|||||||||||||||
(мм) к расстоянию до объекта L |
(м) равно отношению ширины ПЗС- |
||||||||||||||||
матрицы g (мм) к горизонтальному полю зрения G (м): |
|||||||||||||||||
|
|
|
|
|
|
|
|
f L g G . |
(9.1) |
||||||||
|
|
Угол зрения телекамеры по горизонтали |
рассчитывается из соот- |
||||||||||||||
ношения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
2 arctg G 2L , |
(9.2) |
||||||||

163 |
|
или, после элементарных преобразований: |
|
2arctg G 2L . |
(9.3) |
Аналогичные соотношения имеют место для угла поля зрения по |
|
вертикали (рис. 9.3): |
|
f L v V . |
(9.4) |
2arctg V 2L . |
(9.5) |
Из соотношения сторон ПЗС-матриц, применяемых в ТВК, которое
составляет значение 3 : 4, угол зрения по вертикали будет на 25% меньше,
чем угол зрения по горизонтали, т. е.:
0,75 . |
(9.6) |
В отношении формулы (9.6) следует сделать несколько важных за-
мечаний:
1. Формула не учитывает сужение угла обзора по вертикали систе-
мой видеонаблюдения за счет конечного времени обратного хода кадровой развертки видеомонитора, в котором использован ЭЛТ-кинескоп. Сужение реального размера контролируемой зоны, так называемый «overscan», мо-
жет составлять 10 %.
2. Формула соответствует случаю, когда телекамера перпендикулярна
плоскости наблюдения, имеющей высоту V, то есть когда высота установ-
ки телекамеры составляет V/2 (рис. 9.4).
V
V  2
2
L
Рис. 9.4. Установка телекамеры на высоте V/2
164 3. Формула имеет особую значимость, так как определяет так назы-
ваемую «мертвую зону» под телекамерой, вблизи которой злоумышленник не может быть обнаружен системой охранного телевидения.
Сужение угла обзора по вертикали
Зона, контролируемая одной телекамерой, в первую очередь ограни-
чена полями зрения ТВК и максимальной дальностью наблюдения. Кроме того, в непосредственной близости от телекамеры качество изображения может ухудшиться вследствие ограниченной глубины резкости ТВК.
Если телекамера устанавливается выше центра плоскости наблюде-
ния, то необходимый угол обзора по вертикали будет изменяться от значе-
ния α1 до значения α2 (уменьшаться, α1 > α2, рис. 9.5) [19]:
|
2 |
arctg EG CE arctg V |
L . |
(9.7) |
||
С |
|
|
|
|
|
E |
|
2 |
|
||||
|
|
|
|
|||
В |
|
1 |
|
V |
||
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
А |
|
|
|
|
||
|
|
|
|
|
||
Рис. 9.5. Установка телекамеры на высоте V
Следовательно, при установке телекамеры на высоту V абсолютное уменьшение угла обзора по вертикали составит:
1 2 2arctg V 2L arctg V
2L arctg V L , (9.8)
L , (9.8)
а относительная ошибка в случае определения угла обзора по вертикали стандартным методом равна:
|
2arctg V 2L arctg V |
L |
100 % . |
(9.9) |
2arctg V 2L |
|
|||
|
|
|
|

165
Зависимость относительной ошибки δ от значений углов α1, α2 пред-
ставлена на графике рис. 9.6, построенном в соответствии со значениями приведенными в таблице 9.1 [19].
Таблица 9.1
Значения углов α1, α2 и относительной ошибки
α1 |
10 |
20 |
30 |
40 |
50 |
60 |
70 |
80 |
90 |
α2 |
9,92 |
19,43 |
28,19 |
36,05 |
43,00 |
49,11 |
54,47 |
59,21 |
63,43 |
δ(%) |
0,75 |
2,87 |
6,04 |
9,87 |
13,99 |
18,16 |
22,19 |
25,99 |
29,52 |
|
|
|
|
|
|
|
|
|
|
, %
, град
Рис. 9.6. Зависимость относительной ошибки от углов установки ТВК
Как видно из графика (рис. 9.6), ошибка определения угла по верти-
кали тем больше, чем более широкоугольный объектив используется в ТВК. Поправка в выборе фокусного расстояния при использовании таких объективов должна быть большей.
При увеличении высоты установки, т. е. когда N > V, значение угла
α2 зависит от соотношения между N и L, где N — высота установки теле-
камеры, а L — расстояние до объекта наблюдения (рис. 9.7) [19].

166
D |
2 |
|
|
E |
|
С |
|
|
|
|
N
В |
1 |
V |
L
А |
G |
Рис. 9.7. Установка телекамеры на высоте N > V |
|
Из рис. 9.7следует, что угол α2 равен: |
|
2 GDE CDE ADG . |
(9.10) |
Из треугольника CDE следует: |
|
CDE 90 CED 90 arctg CD CE 90 arctg N V |
L , (9.11) |
Из треугольника ADG следует: |
|
ADG 90 AGD 90 arctg AD AG 90 arctg N L , |
(9.12) |
Подставляя выражения (9.10) и (9.11) в (9.12), получаем: |
|
2 arctg N L arctg N V L . |
(9.13) |
Абсолютное уменьшение угла обзора по вертикали составляет: |
|
1 2 2arctg V 2L arctg N L arctg N V L , |
(9.14) |
а ошибка определения угла по вертикали в случае использования стан-
дартного метода равна:
|
2arctg V |
2L arctg N L arctg N V L |
100 % . |
(9.15) |
|
|
2arctg V 2L |
|
|||
|
|
|
|
||
При N = V выражение (9.15) преобразуется в ранее рассмотренное выражение (9.9), а выражение (9.14) — в выражение (9.8).

167
Зависимость относительной погрешности определения поля зрения по вертикали δ для углов 10°, 20° и 30° приведена на рис. 9.8 в виде соот-
ветствующих графиков [19]. , %
N / L
Рис. 9.8. Зависимость относительной ошибки от углов установки Из этих графиков следует, что чем меньше расстояние до объекта
наблюдения и чем выше устанавливается телекамера, тем значительнее будет отличаться в меньшую сторону реальный угол обзора ТВК по верти-
кали по сравнению с рассчитанным стандартным методом по формуле (9.15).
«Мертвая зона» ТВК
Чтобы определить длину «мертвой зоны» ТВК l, следует рассмотреть треугольник DAG, который не попадает в зону видимости ТВК. В этом треугольнике необходимо рассмотреть аналог нарушителя — перпендику-
ляр PQ, опущенный на основание AG (рис. 9.7) [19]. Длина «мертвой зо-
ны» AQ = l оценивается на предмет обнаружения цели, высота которой со-
ответствует длине отрезка PQ = n и зависит от способа перемещения чело-
века-нарушителя. |
|
Из подобия треугольников ADG и QPG следует: |
|
AD PQ AG QG , |
(9.16) |
откуда: |
|

168 |
|
AQ AG QG AG PQ AG AD AG AD PQ AD . |
(9.17) |
Окончательно длина «мертвой зоны»:
l L N n N . |
(9.18) |
Из выражения (9.18) следует:
длина «мертвой зоны» максимальна и составляет l = L (расстояние до объекта наблюдения), если «высота» человека n стремится к 0 (зло-
умышленник ползет);
«мертвая зона» отсутствует (l = 0), если высота установки телека-
меры N равна высоте человека n, который движется в полный рост (его го-
лова сразу попадает в поле зрения телекамеры).
D |
2 |
|
|
E |
|
|
P |
|
|
|
N
n |
V |
|
l
|
|
|
|
А |
Q |
L |
G |
|
|
|
|
Рис. 9.9. К определению «мертвой зоны» ТВК Чтобы оценить промежуточные значения длины «мертвой зоны»,
следует определить высоту цели. Допустим, что человек-нарушитель име-
ет рост n = 1,8 м. Если телекамера установлена на высоте 3 м, то длина
«мертвой зоны» будет равна:
l L 3 1,8 3 0,4 L . |
(9.19) |
При расстоянии до объекта L = 5 м длина «мертвой зоны» составляет l = 2 м, при L = 15 м длина мертвой зоны l = 6 м.

169
Расстояние до объекта наблюдения
Длина зоны охвата определяется требованиями по разрешающей способности, которые, в свою очередь, зависят от конкретной задачи, по-
ставленной перед системой охранного телевидения: обнаружение, разли-
чение или идентификация.
Обнаружение — выделение объекта наблюдения из фона либо раз-
дельное восприятие двух объектов наблюдения, расположенных таком на расстоянии друг от друга, которое соизмеримо с их размерами.
Различение — раздельное восприятие двух объектов наблюдения,
расположенных рядом, либо выделение деталей объекта наблюдения.
Идентификация — выделение и классификация существенных при-
знаков объекта наблюдения либо установление соответствия изображения объекта наблюдения изображению, хранящемуся в базе данных [21].
Для минимально достаточной разрешающей способности длина зоны охвата ТВК с короткофокусным объективом будет меньше, чем соответст-
вующее значение для ТВК с длиннофокусным объективом (рис. 9.10).
Ограничения, налагаемые требованиями по разрешающей способности
ТВК
Короткофокусный объектив Длиннофокусный объектив Среднефокусный объектив
Рис. 9.10. Изменение практического поля зрения в зависимости от фокусного расстояния объектива
170
9.2.Обнаружение, различение и идентификация объекта
Вспециальных телевизионных следящих системах для определения вероятности распознавания объекта на телевизионном растре используют-
ся критерии Джонсона, связывающие вероятность правильного решения с числом строк, приходящихся на размер объекта. Критерии Джонсона, ус-
реднѐнные по всем классам объектов, имеют значения, приведѐнные в таб-
лице 9.2 [20].
|
Таблица 9.2 |
Усредненные критерии Джонсона |
|
|
|
|
Число строк, необходимых для |
Решаемая задача |
обеспечения вероятности правильного ре- |
|
шения 0,5 (50%) |
Обнаружение |
2 |
|
|
Различение |
6 |
|
|
Идентификация |
14 |
|
|
Показатели, приведенные в таблице 9.2, взяты с запасом. Джон Джон-
сон — научный сотрудник отдела ночного видения и электронных сенсо-
ров — разработал эти критерии для оценки эффективной дальности видения инфракрасных камер. Согласно результатам, полученным Д. Джонсоном,
для определения наличия объекта с вероятностью 0,5 его критический раз-
мер должен быть перекрыт 1,5 или более пикселями. 1,5 пикселя в стан-
дартной матрице эквивалентно 0,75 цикла — единице разрешения системы,
изначально использованной в определении Джонсона. Взрослый человек имеет приблизительные размеры 1,8 0,5 м. По результатам статистического анализа эмпирических данных наблюдателей и данных, полученных из тер-
мограмм, критический размер этого объекта 0,75 м.
Распознавание какого-либо объекта определяют как способность ви-
деть тип объекта. Это означает возможность различать животное, челове-
ка, автомобиль, грузовой автомобиль или любой другой объект. Для распо-
знавания объекта необходимо, чтобы он был перекрыт по крайней мере 6
пикселями по его критическому размеру.