

Домашнее задание
.docxИнститут радиоэлектроники и информационных технологий
Кафедра Автоматики
РАЗРАБОТКА МОДЕЛИ УПРАВЛЯЕМОГО ПРОЦЕССА
(УРОВЕНЬ ТОПЛИВА В ПОПЛАВКОВОЙ КАМЕРЕ КАРБЮРАТОРА)
И КАЧЕСТВЕННЫЙ АНАЛИЗ МОДЕЛИ
Вариант № 70
Индивидуальное домашнее задание
по дисциплине «основы теории сигналов»
Выполнил:
студент группы Р-200101 Катаев Я. В.
дата _____________ подпись _____________
Проверил:
преподаватель Кумков С. И.
Екатеринбург 2012
Содержание
Кафедра Автоматики 1
РАЗРАБОТКА МОДЕЛИ УПРАВЛЯЕМОГО ПРОЦЕССА 1
(УРОВЕНЬ ТОПЛИВА В ПОПЛАВКОВОЙ КАМЕРЕ КАРБЮРАТОРА) 1
И КАЧЕСТВЕННЫЙ АНАЛИЗ МОДЕЛИ 1
Вариант № 70 1
Екатеринбург 2012 1
1. Задание 3
2. Постановка задачи, расчетные формулы 4
3. Структура моделирующей программы 8
4. Результаты моделирования 11
5. Выводы 14
Литература 15
1. Задание 3
2. Постановка задачи, расчетные формулы 4
3. Структура моделирующей программы 7
4. Результаты моделирования 9
5. Выводы 11
Литература 12
1. Задание
Уровень топлива в поплавковой камере карбюратора описывается дифференциальным уравнением:
 (1)
(1)
 (2)
(2)
где H — уровень топлива, мм;
k — эффективность управления, мм/с;
U — управление, безразмерный параметр;
A —
коэффициент обратной связи,
 ,
1/мм.
,
1/мм.
В
начальный момент,
 ,
камера пуста — уровень топлива
,
камера пуста — уровень топлива
 .
.
Разработать алгоритмы расчета фазовой траектории управляемого процесса (изменения уровня топлива).
2. Постановка задачи, расчетные формулы
При ближайшем рассмотрении задача сводится к решению простейших дифференциальных уравнений — получение явной зависимости функции — уровня топлива от аргумента — времени.
Решим дифференциальное уравнение на каждом промежутке для наглядности на рис. 1 изображена зависимость H’ = f(H) (фазовая плоскость).
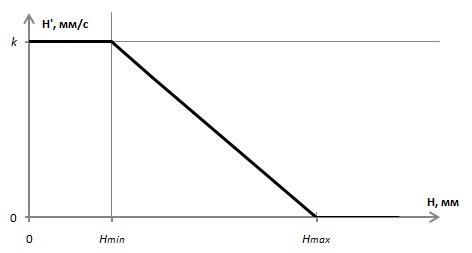
Рис.1. Фазовая плоскость
-
На промежутке
 (или при
(или при
 )
H(t) —
обычная линейная функция:
)
H(t) —
обычная линейная функция:
 . (3)
. (3)
-
На следующем промежутке
 (или при
(или при
 )
H(t) —
экспоненциальная функция:
)
H(t) —
экспоненциальная функция:
 . (4)
. (4)
Видно, что
 . (5)
. (5)
Это
значит, что при заданных начальных
условиях H(t)
будет ассимтотично стремиться к
 ,
но никогда не достигнет этого уровня и
не превысит его, поэтому третий промежуток
с практической точки зрения нас не
интересует. Однако, по закону, если
,
но никогда не достигнет этого уровня и
не превысит его, поэтому третий промежуток
с практической точки зрения нас не
интересует. Однако, по закону, если
 ,
то H(t)=const.
,
то H(t)=const.
При
численном моделировании процесса
(наполнения поплавковой камеры) можно
использовать решения, полученные
аналитически: например, если нам нужно
заполнить таблицу зависимости H
от t,
то мы просто возьмем формулу (3), если
 ,
или формулу (4), если
,
или формулу (4), если
 ,
и подставим в них значение t.
С другой стороны, можно использовать
численные методы решения дифференциальных
уравнений, например метод Эйлера:
,
и подставим в них значение t.
С другой стороны, можно использовать
численные методы решения дифференциальных
уравнений, например метод Эйлера:
 ,
,
 ,
,
 ,
,
отсюда:
 . (6)
. (6)
Минус числовых методов решения заключается в том, что при расчетах возникает некоторая погрешность, однако у него есть и преимущества: поплавковая камера карбюратора в нашей задаче только наполняется, это значительно упрощает решение, но, если мы захотим модифицировать модель и ввести процесс выхода топлива из поплавковой камеры, описываемый функцией времени, то аналитическое решение может и не получиться, тогда нужно будет использовать только численные методы решения. В своем алгоритме я буду использовать именно метод Эйлера.
Для
наглядности нужно не просто выводить
численный материал, полученный в
результате работы программы, а построить
график. Тут же возникает проблема: какие
интервалы переменой и значения функции
должен охватывать график? Понятно, что
значение функции H(t)
меняется от 0
до
 (из начальных условий), но что делать с
аргументом? Время t
меняется от 0
до некоторого
(из начальных условий), но что делать с
аргументом? Время t
меняется от 0
до некоторого
 .
Если мы возьмем
.
Если мы возьмем
 слишком маленьким, то график процесса
будет похож на график, изображенный на
рис. 2, а если слишком большим — то на
график, изображенный на рис. 3. Нужно
взять
слишком маленьким, то график процесса
будет похож на график, изображенный на
рис. 2, а если слишком большим — то на
график, изображенный на рис. 3. Нужно
взять
 такое, при котором
такое, при котором
 будет достаточно большим, например
будет достаточно большим, например

Рис.2.
График для малого

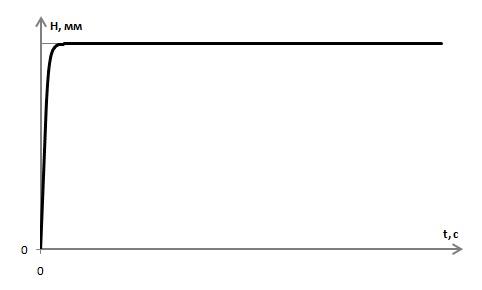
Рис.3.
График для большого

 , (7)
, (7)
где — некоторый коэффициент, назовем его коэффициентом полноты, 1, < 1, безразмерный.
Из
формул (4) и (7) находим
 :
:
 . (8)
. (8)
Найти
значение
 важно так же и из-за того, что оно поможет
найти значение T
(см. формулу(6)). Допустим, что для построения
графика выделено полотно 600 на 800 пикселей.
Тогда, грубо говоря (на самом деле
величина самого графика будет чуть
меньше — из-за запасов на оси и рамку),
мы создадим массив a[
], состоящий из N=800
(800 — ширина полотна)
элементов, заполним его значениями H(t)
для
важно так же и из-за того, что оно поможет
найти значение T
(см. формулу(6)). Допустим, что для построения
графика выделено полотно 600 на 800 пикселей.
Тогда, грубо говоря (на самом деле
величина самого графика будет чуть
меньше — из-за запасов на оси и рамку),
мы создадим массив a[
], состоящий из N=800
(800 — ширина полотна)
элементов, заполним его значениями H(t)
для
 с шагом времени T
и построим график по этим значениям.
Значение шага T может быть
найдено с помощью формулы
с шагом времени T
и построим график по этим значениям.
Значение шага T может быть
найдено с помощью формулы
 . (9)
. (9)
Для
проверки точности выполненных расчетов,
мы сравним a[N-1]
и
 ,
которое вычислим с помощью формулы (4).
,
которое вычислим с помощью формулы (4).
Исходный числовой материал необходимый для численного моделирования решаемой задачи и их ограничения:
 —
уровень
топлива, после которого наполняемость
камеры описывается нелинейной функцией;
—
уровень
топлива, после которого наполняемость
камеры описывается нелинейной функцией;
 —
максимальный
уровень топлива;
—
максимальный
уровень топлива;
k, k > 0 — коэффициент управления;
,
 —
коэффициент наполненности;
—
коэффициент наполненности;
N — количество элементов в массиве, должно быть достаточно большим (от 100 элементов).
3. Структура моделирующей программы
На
рисунке 4 изображена блок-схема алгоритма.
 — вспомогательная функция.
— вспомогательная функция.

Рис.4. Блок-схема
В
программе ввод числового материала
может производиться либо пользователем
либо в тестовом режиме они могут
задаваться случайно. Ниже представлен
код программы, в которой количество
элементов в массиве N
и коэффициент α
заданы изначально и равны соответственно
200 и 0,9999; остальные задаются случайным
целым числом:
 не превышает 50 мм,
не превышает 50 мм,
 не больше
не больше
 ,
чем на 50 мм,
k
не более 30 мм/с.
Примечание: ниже представлен только
код, который имеет непосредственное
отношение к расчету фазовой траектории
процесса, т. е. это не полный код программы.
,
чем на 50 мм,
k
не более 30 мм/с.
Примечание: ниже представлен только
код, который имеет непосредственное
отношение к расчету фазовой траектории
процесса, т. е. это не полный код программы.
Значимый код тестовой программы:
static void Main()
{
double Hmin, Hmax, k, tmax, T, F, ras, alpha;
int pix;
Random a = new Random();
pix = 200;
alpha = 0.9999;
Hmin = a.Next(50);
Hmax = Hmin + a.Next(49) + 1;
k = a.Next(29)+1;
tmax = (Hmin - Hmax) / k * Math.Log((1 - alpha) * Hmax / (Hmax - Hmin)) + Hmin / k;
T = tmax / pix;
double[] mas = new double[pix];
mas[0] = 0;
for (int i = 1; i < pix; i++)
{
if (mas[i - 1] < Hmin) F = k;
else if (mas[i - 1] < Hmax) F = k * (Hmax - mas[i - 1]) / (Hmax - Hmin);
else F = 0;
mas[i] = mas[i - 1] + F * T;
}
ras = Hmax - (Hmax - Hmin)*Math.Exp((Hmin - k * tmax)/(Hmax - Hmin)) - mas[pix - 1];
}
4. Результаты моделирования
Вариант 1 (рис. 5):
 .
.
Погрешность вычисления численным методом составила 0,0009 мм.
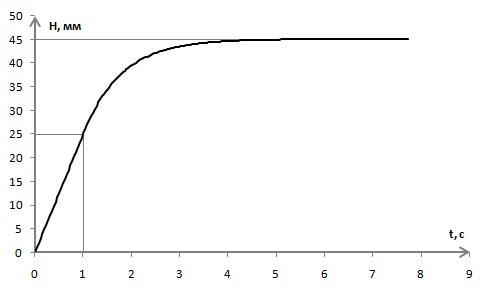
Рис.5. График процесса вариант 1
Вариант 2 (рис. 6):
 .
.
Погрешность вычисления численным методом составила 0,003 мм.

Рис.6. График процесса вариант 2
Вариант 3 (рис. 7):
 .
.
Погрешность вычисления численным методом составила 0,0008 мм.

Рис.7. График процесса вариант 3
На
графиках изображена зависимость уровня
топлива от времени. Горизонтальные
линии соответствуют уровням
 и
и
 ,
вертикальная — времени
,
вертикальная — времени
 .
Как видно, графики получились наглядными,
хорошо выбран масштаб по оси времени.
.
Как видно, графики получились наглядными,
хорошо выбран масштаб по оси времени.
5. Выводы
Был разработан алгоритм расчета фазовой траектории управляемого процесса, а именно расчета изменения уровня топлива в поплавковой камере карбюратора во времени. В отчете представлено задание, пояснен смысл задачи, произведена постановка задачи с сопутствующими необходимыми формулами, графиками. Пояснен порядок расчета алгоритма, приведена блок-схема алгоритма и практически значащая часть программы (код). Алгоритм был протестирован, в отчете приведены результаты тестирования и величина погрешностей.
Литература
Павловская Т.А.; С#. Программирование на языке высокого уровня. Учебник для вузов. — СПб.: Питер, 2007. — 432 с.: ил.