

Шпоры 3
.docx|
Вопрос 48 Доплеровские акустические лаги.Принцип действия доплеровского акустического лага основан на эффекте Доплера, в соответствии с которым при относительном движении источника или приемника звуковых волн происходит изменение частоты принимаемых колебаний по отношению к излученным, причем это изменение, называемое доплеровским сдвигом, пропорционально скорости указанного относительного движения. При использовании доплеровского гидроакус лага и излучатель и приемник колебаний находятся на судне. Доплер лаг двухрежимный: 1. абсолютный (50 – 600 кГц) 2. относительный (4 МГц). В некоторых Доплер лагах встроен блок для измерения глубины – скомбинирован с эхолотом. Некоторые Доплер лаги специально рассчитаны для использования во время швартовки. В Доплер лагах есть наглядное представление о скорости судна: Vx, Vy, угл сноса, общий вектор.Уравнение однолучевого лага.
.
Отраженный сигнал идет на встречу
судну и воспринимаемый сигнал
|
Вопрос
47. Электромагнитный
лаг. Принцип действия индукционного
лага.
|
Вопрос
44 Гирокомпас
с корректируемым чувствительным
элементом. Все гирокомпасы делятся
на корректируемые и нет, под коррекцией
понимается устранение скоростной
девиации с помощью дополнительных
корректирующих моментов вырабатываемых
в электронных вычислительных
устройсвах.
Система диф уравнени
|
Билет
42 Вывод ф-лы для инерционной девиации
1го рода:
см ниже
так
как
см
тут
тогда
или
Основные характерные особенности девиации1го рода.1.Причина возникновения – маневр, при котором есть VN или φ не равно φ* 2.Момент времени, в который девиация 1го рода достигает maxзначения, - момент окончания маневра. 3.Зависит от широты места4.Время существования до полного уничтожения пропорционально широте места. и составляет: в низких (0-25) широтах 1 час в средних(25-60) – около 1.5 часа в высоких(>60) – больше 2 часов 5.Способ предупреждения возникновения – сделать период равным периоду Макса Шулера. Основные особенности девиации 2го рода: 1.Причина появления – наличие гидравлических успокоителей колебаний, и маневр, при котором меняется ускорение по VN2.Максимального значения достигает через 20 мин после окончания маневра.3.Время существования как и у девиации 1го рода 4.Способ предупреждения появления: В ГК «Курс-2М» автомтич. выкл. затухания, в «Курс-4М» - ручной В St-1-22 их нет и она компенсируется за счет того, что до расчетной широты обе девиации имеют разные знаки. |
||||||
|
Билет
7 Для
оценки точности обсервации используются
вероятно-статистические методы,
которые устанавливают границы
некоторой доверительной области, в
которой с заданной вероятностью может
находиться истинное место судна.
Обозначим ковариационную матрицу
погрешностей координат через N= D(x)
= (AТ D-1 A)-1. Для двумерного случая матрица
имеет вид:N=[ n12 n21] где n11 - дисперсия
по широте n22 - дисперсия по отшествию.
n12 = n21 - ковариационные моменты. Вся
информация о погрешностях содержится
в матрице N . В судовождении часто
используется ее геометрическая
интерпретация в виде эллипса
погрешностей. Когда говорят об оценке
точности, то обычно добавляют слова
априорная или апостериорная. Априорная
- это оценка точности, выполненная по
информации о погрешностях измерений
полученной ранее. Как правило, такая
информация о точности измеряемых
навигационных параметров основывается
на многочисленных статистических
исследованиях, которые происходили
до конкретной обсервации в каких-то
осредненных условиях. Именно такая
информация, как правило, содержится
в ковариационной матрице погрешностей
измерений используемой при расчете
координат. В формуле она обозначена
как D . Если погрешности измерений
статистически независимы, то
внедиагональные элементы равны нулю
и матрица имеет вид:
•Рассчитываем собственные значения по формуле (82) •Определяем угол ориентации по формуле (84) •Рассчитываем полуоси по (85)
На
рис. 3.2 показана связь между элементами
ковариационной матрицы и эллипсом.
Отрезок, заключенный между касательной
к эллипсу параллельной оси Y и самой
осью соответствует СКП по широте:
Отрезок на оси Y, отсекаемый вертикальной
касательной, соответствует СКП по
отшествию: |
Билет
8
Основные
сведения о методе наименьших квадратов
Число навигационных измерений,
используемых для определения места
судна, очень существенно. Если
измеряются два навигационных параметра
и решается задача определения ∆φ и
∆λ, то говорят, что в задаче отсутствует
избыточность, т. е. система линейных
уравнений линий положения
совместна и практически всегда имеет
решение. Исключение составляют
параллельные линии положения.
Отсутствие избыточности измерений
приводит к неконтролируемости влияния
различных видов погрешностей на
результат, и особенно опасны грубые
промахи и систематические погрешности.
Поэтому в этих целях, а также для
повышения точности обсервации
используют избыточное число измерений.
Так, в случае оценки приращений
координат ∆φ и ∆λ на плоскости
минимально могут быть измерены три
навигационных параметра, т. е. n = 3. В
этой ситуации избыточность равна
единице. Система уравнений линий
положения будет иметь вид:
Для
того чтобы все же получить согласованное
решение, необходимо ввести дополнительные
условия, которые можно получить, если
более детально представить систему
(7.1). Другими словами, в окрестности
фигуры погрешностей необходимо
выбрать точку (предполагаемое решение),
относительно которой и можно было бы
сформулировать дополнительное
условие. Рис. 7.1 дает представление о
фигуре погрешностей при n = 3. Здесь
отрезки v'1, v'2, v'3 называются невязками.
В специальной литературе также
встречается термин поправка или
ошибка линии положения в зависимости
от знака. Собственно в такой ситуации
именно невязки и определяют решение
относительно фигуры погрешностей.
Множество возможных сочетаний невязок
определяет множество решений, и задача
заключается в подборе наиболее
простого и физически интерпретируемого
условия. Если обозначить ∆Ui=Uo —
Uc=—Li, то с учетом невязок систему
(7.1) можно записать так:
Для
того чтобы почувствовать это среднее,
сконструируем из трех линий положения
следующую фигуру погрешностей. Пусть
две линии положения из трех параллельны
(рис. 7.2). Эта конфигурация противоречит
хорошей морской практике, но зато
удобна для анализа. В такой ситуации
естественно считать, что место судна
находится где-то на третьей линии
положения. Воспользуемся критерием,
рассчитанным по формуле (7.3а). В
результате получим, что минимуму
критерия S соответствует середина
отрезка линии положения ///, заключенного
между прямыми / и //. Решение системы
уравнений называется оптимальным в
смысле выполнения условия S = min, т. е.
при выполнении критерия минимума
суммы квадратов невязок. Избыточность
позволяет нам получить информацию о
некоторых средних значениях координат,
а поэтому важным является утверждение,
что оптимальная точка будет всегда
находиться внутри фигуры погрешностей,
если систематические погрешности δj
= 0. Метод наименьших квадратов является
наиболее универсальным средством
обработки избыточной навигационной
информации. Его основы были разработаны
Лежандром и Гауссом в период с 1795 по
1805 г.Различные модификации метода
используются в настоящее время для
решения многих навигационных задач:
-комплексирование навигационной
информации -вычисление коэффициентов
девиации и радиодевиации -определение
коэффициентов дрейфа, точности
счисления и т. п.Для более удобного
изложения дальнейшего материала
воспользуемся методами линейной
алгебры, что позволит сократить и
унифицировать записи. Обозначим
матрицей А таблицу коэффициентов при
неизвестных в системе (7.2), не
ограничиваясь размерностью n. Теперь
система (7.2) запишется более
компактно:Запишем в развернутой форме
формулу (7.5), выполнив умножение А на
∆Х, и получим знакомую систему (7.2).
Размерности векторов ∆Х и L, т. е.
величины k и n, формально не имеют
значения, и совершенно аналогичная
по своей структуре линейная система
может быть составлена, если в вектор
∆Х, на пример, включить систематическую
погрешность измерения навигационного
параметра: Здесь предполагается, что
систематическая погрешность одинакова
для всех n измерений.Для системы (7.6)
матрицы А и ∆Х из системы (7.5) запишем
так:Для удобства записи в плоской
задаче примем следующие обозначения:
х = ∆φ и y = ∆ω |
Билет 3
|
Билет
9 Чтобы
определить поправку компаса в мо¬ре,
необходимо получить истинное
направление на светило С, т. е. его ИП
(рис. 99), и компасное направление на
светило, т. е. его КП, тогда величина
и знак ΔК определяются по формуле ΔК
= ИП — КП.
Истинный пеленг светила,
равный азимуту его в круговом счете,
в море вычисляют по формулам, таблицам,
номограммам, приборам или ЭВМ. Азимут
является функцией трех аргументов,
т. е.А = A1 (φ, δ, t) = А2 (φ, δ, h) = А3 (φ, h, t)
Метод
моментов.
Если при пеленговании светила замечен
момент по хронометру и сняты с карты
φc , λc , то ΔPnC по формуле котангенсов:
По этой формуле вычисляют азимут в полукруговом счете, переводят в круговой счет и принимают за ИП.Т.к. -90°<arctg A'<90°, то A' м. быть <0, тогда A'=180+( A'). Если tM>180 , то Акруг =NE, tM<180 , то Акруг =SW Метод
высот.
применяется,
если высота светила получена
предварительно, а азимут вычисляется
попутно.Метод высот и моментов
применяется также при определениях
ΔК по Полярной звезде, но ее высота
не измеряется, а принимается равной
φ Предварительные
операции. Выбор условий наблюдений.
На намеченное время подобрать све¬тило
с высотой до 10° (и не более 20°) с помощью
звездного глобуса или на глаз. Проверка
инструментов, Наблюдения. Пронаблюдать
серию из трех пеленгов и КП. Получить
навигационную информацию: Тс, ол, φ ,
λ, КК, ΔК.Обработка наблюдений.
Проанализировать ΔК; срав¬нить с
принятой постоянной - расхождения не
должны превышать точности курсоуказания
(от ±0,3° в хороших условиях, до 1,5° —
в пло¬хих); + ВАС—58. ТВА—57. ЭВМ.Вычисление
азимута светила и поправки компаса
по формуле ctg A. ПО
ВОСХОДУ (ЗАХОДУ) СОЛНЦА
дельта=90-склонение<1°
|
||||||
|
|
Вопрос
10
Географическая
дальность видимости горизонтаПусть
высота глаза наблюдателя, находящегося
в точке А' над уровнем моря, равна е
(рис. 1.15). поверхности Земли в виде
сферы радиусом R Лучи зрения, идущие
к А' и касательные к поверхности воды
по всем направлениям, образуют малый
круг КК', который называется линией
теоретически видимого горизонта.Вследствие
различной плотности атмосферы по
высоте луч света распространяется
не прямолинейно, а по некоторой кривой
А'В, ко¬торая может быть аппроксимирована
окружностью радиусом ρ.Явление
искривления зрительного луча в
атмосфере Земли назы¬вается земной
рефракцией и обычно увеличивает
дальность теорети¬чески видимого
горизонта. наблюдатель видит не КК',
а линию BB', являющуюся малым кругом,
по которой поверхность воды касается
небосвода. Это
видимый горизонт наблюдателя.Коэффициент
земной рефракции рассчитывают по
формуле. Его среднее значение:
где
Дh — дальность видимости горизонта
с высоты предметаТабл. 22 в МТ-75 позволяет
рассчитать географическую дальность
видимости предмета путем двукратного
входа в нее по е и по h, а затем сложения
результатов.На морских навигационных
картах географическая дальность
ви¬димости навигационных ориентиров
дается для высоты глаза наблю¬дателя
е = 5 м и обозначается как Дк — дальность
видимости, указанная на карте. В
соответствии с (1.22) она вычисляется
так:
предметов
и огней Дальность видимости может
трактоваться как априорная дальность
без учета текущей прозрачности
атмосферы, а также контрастности
объекта и фона.
Оптической дальности видимости
- это дальность видимости, зависящая
от способности человеческого глаза
различать предмет по яркости на
некотором фоне, или, как говорят,
различать определенный контраст.
Дневная
оптическая дальность видимости
зависит от контраста между наблюдаемым
объектом и фоном местности. Дневная
оптическая дальность видимости
представляет собой наибольшее
расстояние, на котором видимый контраст
между объектом и фоном становится
равным пороговой контрастности.
Ночная
оптическая дальность
видимости
это максимальная дальность видимости
огня в данное время, определяемая
силой света и текущей метеорологической
видимостью. Контраст
К можно определить так:
|
Вопрос
13 Определение места по двум пеленгам
Способ
определения места судна по двум
пеленгам — один из наиболее
распространенных при плавании в
узкостях или вдоль берега, вблизи
навигационных опасностей.В быстрой
последовательности берут пеленги
двух объектов (маяков, знаков, мысов
и др.). Рассчитывают истинные пеленги,
если имеется поправка компаса, и
прокладывают их на карте.
Иметь
в виду при анализе обсервации:
Во-первых,
достоверность по¬правки компаса,
затем порядок пеленгова¬ния;
во-вторых,
неодновременность взятия пеленгов;
в-третьих,
возможность ошибки в опознании объекта
и, в-четвертых, влияние случайных
ошибок пеленгования 1. Влияние
ошибки в поправке компаса.
Если
при использовании пеленгов допущена
ошибка в принятом или неучтенном
значении поправки компаса εк, град.,
то вместо истинного места судна (точка
F) будет получена точка F1 (рис. 9.2).
где
d — расстояние между ориентирами А и
В. 2.
Порядок пеленгования объектов
|
Вопрос
21 РЛС и (САС, СЭП) Назначение
- Судовая навигационная РЛС предназначена
для обнаружения радиолокационных
объектов, находящихся в пределах
дальности радиолокационного
обнаружения. На
судне навигационная РЛС используется:-в
условиях ограниченной видимости;-в
условиях прибрежного плавания ( РЛС
навигационный инструмент -точность
определения угла 0.5 градуса и дистанции
- 1 % -от величины шкалы дальности);-в
сложных навигационных условиях.
Принцип
функционированияНРЛС.Используется
принцип зондирования
Электромагнитная СВЧ энергия
вырабатывается передатчиком,
последовательность работы которого
определяет синхронизатор, через
антенный переключатель поступает в
антенну, снабженную антенно-поворотным
устройством, и излучается в эфир.
Ответный эхо-сигнал через антенну и
антенный переключатель попадает в
приемник, где преобразуется и
усиливается и поступает в индикаторное
устройство. В индикаторном устройстве
электрические сигналы выводятся в
удобном для оператора наглядном виде,
формируется дополнительная служебная
информация производятся замеры и
вычисления. Принцип
измерения дальности в НРЛС.Неподвижные
кольца дальности (НКД) - грубая оценка
дальности до цели.Подвижное кольцо
дальности (ПКД) - точное измерение
дальности до цели.Электронный визир
дальности (ЭВД) - измерение дальности
ЭВМ.Подвижный визир дальности
(ПВД).Принцип
измерения направления в НРЛС.Механический
визир отсчета направлений (МВН)Электронный
визир отсчета направлений (ЭВН) Отметка
курса (ОК).Принципы
формирования радиолокационной
картины.
Ориентации изображения «Курс- HEAD UP»
- влияние рысканий курса судна«Север
- NORTH UP» - согласование с гирокомпасом
(ГК)«Курс стабилизированный - COURSE UP
Отражающие
свойства различных типов объектов -
зависят от формы, ракурса, материала
и т.д.».
|
Вопрос45
Гирокомпас с корректируемым
чувствительным элементом. Все
гирокомпасы делятся на корректируемые
и нет, под коррекцией понимается
устранение скоростной девиации с
помощью дополнительных корректирующих
моментов вырабатываемых в электронных
вычислительных устройсвах.
Система диф уравнений:
Способы снижения:
1. увеличение перида собственных
незатухающих колебаний
|
|||||
|
|
Вопрос
46 Навигационный гиротахометры.
Гиротахометр служит для удержания
судна на заданном курсе(до 0.2 гр.), для
совершения циркуляции и управление
судном в шварторном режиме.
Устанавливается на судах валовой
вместимостью от 50000т.Двухстепенной
гироскоп удерживается с помощью
рамки, а рамка в свою очередь удерживается
с помощью пружин.
|
Вопрос
43 Требования к точности на
маневрировании.А.421:
1. φ=0-70 и V= до 30 уз 2. предельно допустимая
погрешность при изменении скорости
+- 2 градуса 3. при V= 30 уз и быстрой
полуциркуляции предельно допустимая
погрешность +- 3 градуса
А.821:
1. для φ=0-70 и V=30-70 уз 2. предельно
допустимая погрешность при изменении
скорости +-2 град. 3. при V= 70 уз и
полуциркуляции +-3 град
Накопление суммарной инерционной
девиации. Если
судно совершает повторные маневры и
время между ними невелико, то девиация
от первого и второго маневра может
суммироваться. Академик Крылов доказал
что это время равно половине периода
затухающих колебаний гирокомпаса в
данной широте места. Соответственно
следует избегать таких маневров.Использование
математических моделей для цели
снижения инерционных девиаций.
Сущность-
в комплект компаса вводится приставка
nautocourset, в которой находится навигационный
микропроцессор, в который заложена
математ модель в виде следующей
системы дифференциальных уравнений
|
Вопрос
41 Гирокомпасы с автономным чувствительным
элементом.
|
Вопрос 23 Навигационные системы с обменом информации Назначение - автоматическая идентификационная система (АИС) предназначена для обеспечения безопасности мореплавания во всех морских районах (предупреждение столкновений в режиме "судно" - "судно") и повышения эффективности систем управления движением судов (СУДС) в морских районах А1 ГМССБ (информации о судне и грузе в режиме "судно" - "берег"), мониторинга судоходства. АИС является новой навигационно-связной системой, работает в ОВЧ (УКВ) диапазоне и обеспечивает автоматическую передача и прием сообщений, в которых содержатся все необходимые судовые данные как для центров СУДС, так и для проходящих судов. Все суда валовой вместимостью 300 и более, совершающие международные рейсы, грузовые суда валовой вместимостью 500 и более, не совершающие международные рейсы, а также пассажирские суда независимо от их размера, должны быть оборудованы АИС. Функции АИС-передача с судов судовых данных в центр СУДС для обеспечения надежной проводки судов;-передача судовых данных о судне и его грузе в береговые службы при плавании в морском районе А1 ГМССБ;-идентификация и обмен навигационными данными между судами во всех морских районах плавания с целью предупреждения столкновений;-обмен текстовыми сообщениями между судами и береговыми службами;-высокоточного определения местоположения судов путем ввода дифференциальных поправок GNSS, которые передаются береговыми станциями по запросу судов;-мониторинга судов. Дальность действия. Предельная дальность распространения радиоволн R (без учета рефракции) определяется выражением R(км) = 3,6 ( ) ,где h1, h2 - высоты расположения передающей и приемной антенн.Номинальные параметры судовых станций АИС - PR = 12.5 Вт (2 Вт).При высоте установки судовой антенны 9 м, береговой ретрансляционной антенны h1 = 100 м дальность действия - 45 морских миль. Для случая межсудовой связи, когда судовые антенны на высоте h2 = 9 м, дальность действия АИС равна Использование информации АИС в судовождении Роль АИС в предотвращении столкновения судов. Использование АИС в СУДС. Установки маршрута, навигационных данных. Работа с судовой информацией. Управление каналами. Прием и передача сообщений в режимах ближней и дальней связи. Опознавание и трактование навигационной информации. Решение задач по предупреждению столкновений. 18 морских милям. Система управления движением судов; или служба управления движением судов (СУДС) предназначена для повышения безопасности и эффективности движения судов и защиты морской среды путем взаимодействия с судами и судопотоками и реагированием на ситуации, возникающие при движении судов .СУДС устанавливается в районах:-с высокой интенсивностью судоходства;-где осуществляется перевозка опасных грузов;-со сложными противоречивыми требованиями к условиям плавания;-с трудными гидрографическими, гидрометеорологическими и метеорологическими условиями;\-с наличием меняющих положение отмелей и другими местными опасностями;-требующие особых мер по защите среды;-где судоходство подвергается воздействию со стороны других видов активности на море;-которые характеризуются высоким уровнем аварийности;-которые являются смежными районами, где уже действуют или проектируются СУДС, что потребует должного сотрудничества между соседними государствами; с наличием узких каналов, мостов, сложной конфигурацией портов и других мест, где перемещение судов может быть ограничено .Основными функция СУДС являются:-контроль за движением судов и за положением на якорных стоянках;-передача судам навигационной, оперативной и иной информации;-организация движения судов;\-оказание помощи в судовождении. СУДС подразделяются на:-портовые или локальные;-прибрежные;-региональные. |
|||||
 траженный
от грунта ( очень слабый)
траженный
от грунта ( очень слабый) , отсюда
, отсюда
 -это формула характеризует работу
однолучевого лага.Двух
лучевой Доплер лаг.
-это формула характеризует работу
однолучевого лага.Двух
лучевой Доплер лаг.


 -
при отсутствии качки. Двухлучевая
система обладает в 2 раза большей
чувствительностью.
-
при отсутствии качки. Двухлучевая
система обладает в 2 раза большей
чувствительностью.
 -
при качке. Погрешность двухлучевого
лага при качке .
-
при качке. Погрешность двухлучевого
лага при качке .
 В
этом лаге погрешность не зависит от
угла θ. Методы
повышения точности
Доплер лагов.1. гиростатические
антенны- не участвуют в качке судна.
2. использование двух и много лучевых
Доплер лагов. 3. спец конструкция
антенны виде линейной решетки (
фазированная антенна – плоская,
заподлицо с днищем судна, но создает
наклонный луч под углом 60 град в нос
и корму ) .
В
этом лаге погрешность не зависит от
угла θ. Методы
повышения точности
Доплер лагов.1. гиростатические
антенны- не участвуют в качке судна.
2. использование двух и много лучевых
Доплер лагов. 3. спец конструкция
антенны виде линейной решетки (
фазированная антенна – плоская,
заподлицо с днищем судна, но создает
наклонный луч под углом 60 град в нос
и корму ) . Основной
элемент лага
– индукционный преобразователь он
находится в днище судна - это латунная
трубка и в ней 2 электрода которые
соприкасаются с водой. От этих
электродов идут провода. Также внутри
латунной трубки расположен электромагнит,
обмотка которого питается переменным
током с частотой 50 Гц. Электромагнит
создает переменное магнитное поле
движущееся вместе с судном относительно
воды. Магнитная индукция этого поля
определяется выражением:
Основной
элемент лага
– индукционный преобразователь он
находится в днище судна - это латунная
трубка и в ней 2 электрода которые
соприкасаются с водой. От этих
электродов идут провода. Также внутри
латунной трубки расположен электромагнит,
обмотка которого питается переменным
током с частотой 50 Гц. Электромагнит
создает переменное магнитное поле
движущееся вместе с судном относительно
воды. Магнитная индукция этого поля
определяется выражением:
 ; где W=2пf (f –частота);
; где W=2пf (f –частота);
 . В результате между электродами на
расстоянии l наводится ЭДС. Электроды
за время dt
. В результате между электродами на
расстоянии l наводится ЭДС. Электроды
за время dt со скоростью V протравливают площадь
dS. dS=lVdt ;
со скоростью V протравливают площадь
dS. dS=lVdt ;
 -
формула напряжения индукционного
преобразователя(полезный сигнал +
квадратурная помеха). и - конструктивные
параметры индукционного преобразователя.
Сигнал Uип снимается с электродов и
передается в электрическую схему
лага для преобразования его в отсчет
скорости судна. Квадратурная помеха
отфильтровывается. Таким образом
индукц лаг измеряет скорость судна
относительно воды. Анализ
точности измерения
скорости.Точность показания лага в
большой степени зависит от места
установки инд. преобразователя. Это
объясняется прежде всего возникновением
вблизи поверхности корпуса движущегося
судна турбулентного слоя воды, имеющего
не одинаковую толщину и случайное
поле скоростей частиц жидкости. Кроме
того , распределение магнитной индукции
В в объеме воды не одинаково по длине
судна и носит весьма сложный, не
поддающийся аналитическому исследованию
характер. Эти и другие случайные
факторы приводят к тому, что измеренная
лагом скорость не соответствует
истинной скорости судна, причем связь
между этими скоростями имеет нелинейный
характер. Т.о. инд лаг имеет погрешность
, которая должна быть компенсирована
поправкой
-
формула напряжения индукционного
преобразователя(полезный сигнал +
квадратурная помеха). и - конструктивные
параметры индукционного преобразователя.
Сигнал Uип снимается с электродов и
передается в электрическую схему
лага для преобразования его в отсчет
скорости судна. Квадратурная помеха
отфильтровывается. Таким образом
индукц лаг измеряет скорость судна
относительно воды. Анализ
точности измерения
скорости.Точность показания лага в
большой степени зависит от места
установки инд. преобразователя. Это
объясняется прежде всего возникновением
вблизи поверхности корпуса движущегося
судна турбулентного слоя воды, имеющего
не одинаковую толщину и случайное
поле скоростей частиц жидкости. Кроме
того , распределение магнитной индукции
В в объеме воды не одинаково по длине
судна и носит весьма сложный, не
поддающийся аналитическому исследованию
характер. Эти и другие случайные
факторы приводят к тому, что измеренная
лагом скорость не соответствует
истинной скорости судна, причем связь
между этими скоростями имеет нелинейный
характер. Т.о. инд лаг имеет погрешность
, которая должна быть компенсирована
поправкой
 .
В общем случае поправка лага является
некоторой функции скорости судна
.
В общем случае поправка лага является
некоторой функции скорости судна
 . Эту функцию можно представить в виде
суммы трех составляющих
. Эту функцию можно представить в виде
суммы трех составляющих ( где а-постоянная, в – линейная а с
–нелинейная составляющие поправки).
Постоянная составляющая поправка
лага вводится во время регулировки
прибора в порту или в море при нулевой
скорости и штилевой погоде. После
выполнения такой регулировки поправка
лага имеет линейную и нелинейную
составляющие. Определение и ввод
линейной составляющей поправки лага
выполняют по результатам испытания
лага на мерной линии. Нелинейная
поправка лага вводится с помощью
корректора. Данные для установки
корректора также определяют на мерной
линии. Регулировку лага необхоимо
производить ежегодно, так как в
следствии обрастания корпуса судна
изменение поправки лага за год может
доходить до 2.5%. Погрешность составляет
0.2 уз.
( где а-постоянная, в – линейная а с
–нелинейная составляющие поправки).
Постоянная составляющая поправка
лага вводится во время регулировки
прибора в порту или в море при нулевой
скорости и штилевой погоде. После
выполнения такой регулировки поправка
лага имеет линейную и нелинейную
составляющие. Определение и ввод
линейной составляющей поправки лага
выполняют по результатам испытания
лага на мерной линии. Нелинейная
поправка лага вводится с помощью
корректора. Данные для установки
корректора также определяют на мерной
линии. Регулировку лага необхоимо
производить ежегодно, так как в
следствии обрастания корпуса судна
изменение поправки лага за год может
доходить до 2.5%. Погрешность составляет
0.2 уз.
 -собственный
гироскопический момент; γ-угол
показывает мгновенное положение
линии маятника по отношении к средней
линии ИГ;
-собственный
гироскопический момент; γ-угол
показывает мгновенное положение
линии маятника по отношении к средней
линии ИГ;
 - корректирующие моменты, вырабатываются
вычислительными устройствами;
- корректирующие моменты, вырабатываются
вычислительными устройствами;
 - вредные моменты;
- вредные моменты;
 -компенсирующие моменты.Инерционная
девиация.
Формулу диф уравнений запишем
применительно для случая влияния
маневрированияи сделаем допущения
: наложим корректирующие моменты;
=0. Если искать мах значения инерционной
девиации которая наступит к концу
маневра , то можно принебречь углом
β=0
-компенсирующие моменты.Инерционная
девиация.
Формулу диф уравнений запишем
применительно для случая влияния
маневрированияи сделаем допущения
: наложим корректирующие моменты;
=0. Если искать мах значения инерционной
девиации которая наступит к концу
маневра , то можно принебречь углом
β=0

 -
определяет мах значение инерционной
девиации на момент окончания маневра.В
корректируемых компасах инерционная
девиация не зависит от широты.Способы
снижения:
1. увеличение перида собственных
незатухающих колебаний
-
определяет мах значение инерционной
девиации на момент окончания маневра.В
корректируемых компасах инерционная
девиация не зависит от широты.Способы
снижения:
1. увеличение перида собственных
незатухающих колебаний
 2. переход на время маневра в режим
гироазимута (Ау=0) 3. установка
ограничителей в корпусе индикатора
горизонта 4. использование высоковязкой
жидкости в корпус ИГ. Достоинства:1.
высокавтоматизированы 2. новый гироскоп
– динамически настраиваемый 3.
применяется кварцевый акселератор
компенсационного типа 4. автомат
переход в ГА при маневре 5. аккумулятор
6. сигналы коррекции могут вводится
от GPS и лага (или в ручную) 7. двухпериодные
: 15-20 мин-береговой; 350-360 минут – морской
8. температурный датчик определяющий
и компенсирующий дрейф гироскопа 9.
автоматический сигнал о выходе компаса
из меридиана по любым причина
2. переход на время маневра в режим
гироазимута (Ау=0) 3. установка
ограничителей в корпусе индикатора
горизонта 4. использование высоковязкой
жидкости в корпус ИГ. Достоинства:1.
высокавтоматизированы 2. новый гироскоп
– динамически настраиваемый 3.
применяется кварцевый акселератор
компенсационного типа 4. автомат
переход в ГА при маневре 5. аккумулятор
6. сигналы коррекции могут вводится
от GPS и лага (или в ручную) 7. двухпериодные
: 15-20 мин-береговой; 350-360 минут – морской
8. температурный датчик определяющий
и компенсирующий дрейф гироскопа 9.
автоматический сигнал о выходе компаса
из меридиана по любым причина
 так
как
так
как







 Основные
этапы проектирования карты.1-й
этап.
Осуществление геодезических измерений
на поверхности Земли и их координатная
привязка к конкретному
референц-эллипсоиду.2-й
этап.
Уменьшение размеров референц-эллипсоида
до определенного масштаба с целью
его дальнейшего развертывания на
плоскости. Масштаб преобразования
называет-ся главным масштабом μ0
будущей карты.3-й
этап.
Выбор картографической проекции для
преобразования Глобус — Карта. Из
теории искажений известно, что при
проектировании эллипсоида на плоскость
масштаб μ0 остается постоянным лишь
на определенном множестве точек
карты. В общем случае при удалении от
этого множества масштаб изменяется
и становится частным масштабом μ
другого множества точек.
Величина
Основные
этапы проектирования карты.1-й
этап.
Осуществление геодезических измерений
на поверхности Земли и их координатная
привязка к конкретному
референц-эллипсоиду.2-й
этап.
Уменьшение размеров референц-эллипсоида
до определенного масштаба с целью
его дальнейшего развертывания на
плоскости. Масштаб преобразования
называет-ся главным масштабом μ0
будущей карты.3-й
этап.
Выбор картографической проекции для
преобразования Глобус — Карта. Из
теории искажений известно, что при
проектировании эллипсоида на плоскость
масштаб μ0 остается постоянным лишь
на определенном множестве точек
карты. В общем случае при удалении от
этого множества масштаб изменяется
и становится частным масштабом μ
другого множества точек.
Величина называется
увеличением масштаба. Рис 3.На рис.
3.4 представлена трапеция поверхности
земного эллипсоида, выполненная в
масштабе μ0 и ограниченная отрезками
параллелей и меридианов. Локсодромия
имеет длину dS. Справа форма этой
трапеции после применения к ней
математического преобразования,
называемого картографической
проекцией.
Функцию преобразования координат
нам и нужно отыскать. В этой трапеции
масштабы преобразования Эллипсоид
— Глобус по параллели n и меридиану
m равны, т. е. m=n= μ0, откуда углы на
глобусе равны углам на эллипсоиде.При
проектировании глобуса на плоскость
необходимо сохранить равенство углов
на карте и глобусе, но изменить
конфигурацию координатной сетки в
соответствии с требованиями к карте.
Этого можно достичь, когда при
проектировании глобуса на плоскость
масштабы тип будут искажаться одинаково
в любой точке карты. Таким образом,
формальный признак равноугольности
карты m/n = 1. Отсюда получаем следующее
условие равенства углов: m=n. Уравнения
меркаторской проекции и формулы
масштабов:
называется
увеличением масштаба. Рис 3.На рис.
3.4 представлена трапеция поверхности
земного эллипсоида, выполненная в
масштабе μ0 и ограниченная отрезками
параллелей и меридианов. Локсодромия
имеет длину dS. Справа форма этой
трапеции после применения к ней
математического преобразования,
называемого картографической
проекцией.
Функцию преобразования координат
нам и нужно отыскать. В этой трапеции
масштабы преобразования Эллипсоид
— Глобус по параллели n и меридиану
m равны, т. е. m=n= μ0, откуда углы на
глобусе равны углам на эллипсоиде.При
проектировании глобуса на плоскость
необходимо сохранить равенство углов
на карте и глобусе, но изменить
конфигурацию координатной сетки в
соответствии с требованиями к карте.
Этого можно достичь, когда при
проектировании глобуса на плоскость
масштабы тип будут искажаться одинаково
в любой точке карты. Таким образом,
формальный признак равноугольности
карты m/n = 1. Отсюда получаем следующее
условие равенства углов: m=n. Уравнения
меркаторской проекции и формулы
масштабов:

 По
фрпмуле cos стороны. ). Если tM>180 , то
Акруг =NE, tM<180 , то Акруг =SW Применяется,
когда высоту можно вычислить заранее
Метод
высот и моментов.
Если после наблюдения высот светила
взять его пеленг по компасу и заметить
Тхр, то одновременно с получением
места судна или линии положения можно
получить и поправку компаса.Для
вычисления h и A применяется система
формул:
По
фрпмуле cos стороны. ). Если tM>180 , то
Акруг =NE, tM<180 , то Акруг =SW Применяется,
когда высоту можно вычислить заранее
Метод
высот и моментов.
Если после наблюдения высот светила
взять его пеленг по компасу и заметить
Тхр, то одновременно с получением
места судна или линии положения можно
получить и поправку компаса.Для
вычисления h и A применяется система
формул:
 .ОПРЕДЕЛЕНИЕ
ПОПРАВКИ КОМПАСА. ОБЩИЙ СЛУЧАЙПри
видимости светил поправка компаса
может быть определена в любое время
суток по методу моментов, который и
представляет общий случай определения
поправки компаса
.ОПРЕДЕЛЕНИЕ
ПОПРАВКИ КОМПАСА. ОБЩИЙ СЛУЧАЙПри
видимости светил поправка компаса
может быть определена в любое время
суток по методу моментов, который и
представляет общий случай определения
поправки компаса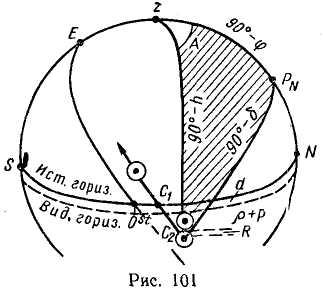 1.
Пронаблюдать пеленг Солнца в момент
появления (или погружения) на горизонте
его верхнего края.2. Заметить момент
Тс до 5м, рассчитать Тгр и выбрать из
МАЕ δ до 0,10- На этот же момент снять
φc до 0,1°, а в высоких широтах — до
3'.3. Войти в табл. 20-а при одноименных
φ и λ или 20-6 при разноимен¬ных и выбрать
ближайшее к φ и λ значение Ат.
Проинтерполировать ази¬мут по б и ф
и придать поправки к А г. Полученному
азимуту приписать наи¬менование в
полукруговом счете и перевести его
в круговой счет.4. Рассчитать ΔК = ИП
— КП.5. Проанализировать ΔК. сравнением
с принятой ранее и оценить воз¬можные
ошибки определения АК-Определение
поправки компаса по наблюдениям
Полярной звезды.
1.
Пронаблюдать пеленг Солнца в момент
появления (или погружения) на горизонте
его верхнего края.2. Заметить момент
Тс до 5м, рассчитать Тгр и выбрать из
МАЕ δ до 0,10- На этот же момент снять
φc до 0,1°, а в высоких широтах — до
3'.3. Войти в табл. 20-а при одноименных
φ и λ или 20-6 при разноимен¬ных и выбрать
ближайшее к φ и λ значение Ат.
Проинтерполировать ази¬мут по б и ф
и придать поправки к А г. Полученному
азимуту приписать наи¬менование в
полукруговом счете и перевести его
в круговой счет.4. Рассчитать ΔК = ИП
— КП.5. Проанализировать ΔК. сравнением
с принятой ранее и оценить воз¬можные
ошибки определения АК-Определение
поправки компаса по наблюдениям
Полярной звезды.

 дельта очень мала =>φ≈h, тогда +
быстрый расчетазимута Только
два раза в сутки и одно измерениеПусть
естьТгр , дата, выписываем на эти
параметры часовой угол точки овна;
из интерполяционных таблиц на Тгр
получаем дельта S ; получаем Sгр λ с ;
получаем Sм
дельта очень мала =>φ≈h, тогда +
быстрый расчетазимута Только
два раза в сутки и одно измерениеПусть
естьТгр , дата, выписываем на эти
параметры часовой угол точки овна;
из интерполяционных таблиц на Тгр
получаем дельта S ; получаем Sгр λ с ;
получаем Sм Географическая
дальность видимости предметов
Географическая дальность видимости
предметов в море Дп, как следует из
предыдущего параграфа, будет зависеть
от величины е — высоты глаза наблюдателя,
величины h — высоты предмета и от
коэффициента рефракции х.
Величина
Дп определяется наибольшим расстоянием,
на котором наблюдатель увидит его
вершину над линией горизонта..Расчет
такой дальности позволяет штурману
иметь дополнительную информацию о
приближенном месте судна относительно
ориентира.
Географическая
дальность видимости предметов
Географическая дальность видимости
предметов в море Дп, как следует из
предыдущего параграфа, будет зависеть
от величины е — высоты глаза наблюдателя,
величины h — высоты предмета и от
коэффициента рефракции х.
Величина
Дп определяется наибольшим расстоянием,
на котором наблюдатель увидит его
вершину над линией горизонта..Расчет
такой дальности позволяет штурману
иметь дополнительную информацию о
приближенном месте судна относительно
ориентира.

 Порядок
пеленгования двух ориентиров зависит
от их курсовых углов. Первым нужно
пеленговать предмет, располо¬женный
ближе к диаметральной плоскости
судна.
Порядок
пеленгования двух ориентиров зависит
от их курсовых углов. Первым нужно
пеленговать предмет, располо¬женный
ближе к диаметральной плоскости
судна.


 Минимальная
дальность действия
- определяется длительностью
зондирующего импульса и составляет
150 м для длительности 1 мкс (15 м для 0,1
мкс).Минимальная
дальность обнаружения -
характеристика, учитывающая длительность
зондирующего импульса и время
восстановления чувствительности,
зависит от шкалы дальности (длительности
импульса). Составляет десятки
метров.Мертвая
зона
- зона определяемая высотой установки
антенны и шириной диаграммы
направленности.Теневые
секторы в горизонтальной и вертикальной
плоскости
- секторы радиолокационного наблюдения,
которые имеют зоны радиотени от мачт,
труб, надстроек. Максимальная
дальности обнаружения объектов -
зависит от высоты установки антенны,
рефракции атмосферы, характеристик
облучаемого объекта, длины
антенно-волноводного тракта, настройки
РЛС. Курс
судна должен отображаться на экране
непрерывной линией с максимальной
погрешностью не более одного градуса.
Скорость вращения антенны должна
быть не менее 20 об/мин. Суда
валовой вместимостью 10000 и более
должны иметь САРП с диаметром экрана
340 мм.- индикация следов радиолокационных
эхосигналов целей (прошлые положения
целей в виде синтезированного
послесвечения). Для
3 см диапазона ширина диаграммы
направленности в горизонтальной
плоскости 0.1 - 0.5 градусов; для 10 см -
1.2 - 2 градуса (конструктивные особенности
антенны).
Для
3 см и 10 см ширина диаграммы направленности
в вертикальной плоскости составляет
около 20 градусов, что связано с качкой
судна (для береговых РЛС должна быть
5 -7 градусов).
Минимальная
дальность действия
- определяется длительностью
зондирующего импульса и составляет
150 м для длительности 1 мкс (15 м для 0,1
мкс).Минимальная
дальность обнаружения -
характеристика, учитывающая длительность
зондирующего импульса и время
восстановления чувствительности,
зависит от шкалы дальности (длительности
импульса). Составляет десятки
метров.Мертвая
зона
- зона определяемая высотой установки
антенны и шириной диаграммы
направленности.Теневые
секторы в горизонтальной и вертикальной
плоскости
- секторы радиолокационного наблюдения,
которые имеют зоны радиотени от мачт,
труб, надстроек. Максимальная
дальности обнаружения объектов -
зависит от высоты установки антенны,
рефракции атмосферы, характеристик
облучаемого объекта, длины
антенно-волноводного тракта, настройки
РЛС. Курс
судна должен отображаться на экране
непрерывной линией с максимальной
погрешностью не более одного градуса.
Скорость вращения антенны должна
быть не менее 20 об/мин. Суда
валовой вместимостью 10000 и более
должны иметь САРП с диаметром экрана
340 мм.- индикация следов радиолокационных
эхосигналов целей (прошлые положения
целей в виде синтезированного
послесвечения). Для
3 см диапазона ширина диаграммы
направленности в горизонтальной
плоскости 0.1 - 0.5 градусов; для 10 см -
1.2 - 2 градуса (конструктивные особенности
антенны).
Для
3 см и 10 см ширина диаграммы направленности
в вертикальной плоскости составляет
около 20 градусов, что связано с качкой
судна (для береговых РЛС должна быть
5 -7 градусов).
 -собственный
гироскопический момент; γ-угол
показывает мгновенное положение
линии маятника по отношении к средней
линии ИГ; - корректирующие моменты,
вырабатываются вычислительными
устройствами; - вредные моменты;
-компенсирующие моменты.
Инерционная девиация.Формулу
диф уравнений запишем применительно
для случая влияния маневрированияи
сделаем допущения : наложим корректирующие
моменты; =0. Если искать мах значения
инерционной девиации которая наступит
к концу маневра , то можно принебречь
углом β=0
-собственный
гироскопический момент; γ-угол
показывает мгновенное положение
линии маятника по отношении к средней
линии ИГ; - корректирующие моменты,
вырабатываются вычислительными
устройствами; - вредные моменты;
-компенсирующие моменты.
Инерционная девиация.Формулу
диф уравнений запишем применительно
для случая влияния маневрированияи
сделаем допущения : наложим корректирующие
моменты; =0. Если искать мах значения
инерционной девиации которая наступит
к концу маневра , то можно принебречь
углом β=0

 -
определяет мах значение инерционной
девиации на момент окончания маневра.В
корректируемых компасах инерционная
девиация не зависит от широты.
-
определяет мах значение инерционной
девиации на момент окончания маневра.В
корректируемых компасах инерционная
девиация не зависит от широты. 2. переход на время маневра в режим
гироазимута (Ау=0) 3. установка
ограничителей в корпусе индикатора
горизонта 4. использование высоковязкой
жидкости в корпус ИГ.Достоинства:1.
высокавтоматизированы 2. новый гироскоп
– динамически настраиваемый 3.
применяется кварцевый акселератор
компенсационного типа 4. автомат
переход в ГА при маневре 5. аккумулятор
6. сигналы коррекции могут вводится
от GPS и лага (или в ручную) 7. двухпериодные
: 15-20 мин-береговой; 350-360 минут – морской
8. температурный датчик определяющий
и компенсирующий дрейф гироскопа 9.
автоматический сигнал о выходе компаса
из меридиана по любым причинам. Режим
гироазимута можно применять в высоких
широтах(80-90).При совершении
маневра(примерно 20 гр.-0.3гр.)Дрейф
чувствительного элемента-0.01 в час
2. переход на время маневра в режим
гироазимута (Ау=0) 3. установка
ограничителей в корпусе индикатора
горизонта 4. использование высоковязкой
жидкости в корпус ИГ.Достоинства:1.
высокавтоматизированы 2. новый гироскоп
– динамически настраиваемый 3.
применяется кварцевый акселератор
компенсационного типа 4. автомат
переход в ГА при маневре 5. аккумулятор
6. сигналы коррекции могут вводится
от GPS и лага (или в ручную) 7. двухпериодные
: 15-20 мин-береговой; 350-360 минут – морской
8. температурный датчик определяющий
и компенсирующий дрейф гироскопа 9.
автоматический сигнал о выходе компаса
из меридиана по любым причинам. Режим
гироазимута можно применять в высоких
широтах(80-90).При совершении
маневра(примерно 20 гр.-0.3гр.)Дрейф
чувствительного элемента-0.01 в час


 Н
– горизонтная составляющая, последняя
формула – уравнение перетекания
жидкости. В указанной системе оператор
должен был вести: Н,В,С, (-известны из
паспорта), и VN, VE, φ. Коррекция
производилась только репиторов. (еще
в этой приставке был цифровой аналоговый
преобразователь) . стандарт 20 также
мог тестировать гирокомпас.
Н
– горизонтная составляющая, последняя
формула – уравнение перетекания
жидкости. В указанной системе оператор
должен был вести: Н,В,С, (-известны из
паспорта), и VN, VE, φ. Коррекция
производилась только репиторов. (еще
в этой приставке был цифровой аналоговый
преобразователь) . стандарт 20 также
мог тестировать гирокомпас. исходя из системы диф.уравнений(для
неподвижного судна у причала) Решаем
систему
исходя из системы диф.уравнений(для
неподвижного судна у причала) Решаем
систему Необходимо
опр
Необходимо
опр еделить
три производных
еделить
три производных