

2.4 Решение наилучших вариантов засечки
Обратная угловая засечка имеет множество способов решения. Для решения поставленной задачи сначала определить дирекционный угол одного из направлений (АР), принятого в качестве главного, по формуле Деламбра:
![]()
![]() (7)
(7)
![]()
далее, определить дирекционный угол следующего направления:
![]() (8)
(8)
После определения дирекционных углов направлений АР и ВР, координаты определяемой точки вычислить по формулам Гаусса:
 (9)
(9)
Для контроля вычислений вторично найти ординату определяемой точки по формуле:
![]() (10)
(10)

Рисунок 6 - Схема обозначений к вычислениям по формулам (7-11)
Решить два наилучших варианта засечки, используя исходные данные и формулы (7-10). Вычисления произвести по схеме, приведенной в таблице 5.
Если расхождения координат в двух вариантах засечки не превысят 0,2 м (с учетом точности исходных данных) за окончательные значения координат принять их средние значения.
Схема для вычислений обратной угловой засечки Таблица 5
|
Обозначения пунктов |
Координаты |
- |
|
-
|
| |
|
А
В
С
Р |
|
|
|
- |
tg |
- |
|
|
|
ctg |
| |||
|
|
- |
tg |
- | |||
|
|
|
ctg |
| |||
|
- |
|
- |
| |||
|
|
|
tg |
| |||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
|
|
|
|
|
|
|
2.5 Оценка ожидаемой точности полученных результатов
![]() Для оценки ожидаемой
точности полученных координат по каждому
варианту засечки применить формулу
(обозначения согласно рисунку 6):
Для оценки ожидаемой
точности полученных координат по каждому
варианту засечки применить формулу
(обозначения согласно рисунку 6):
![]()
 (11) , где
(11) , где
![]() -средняя
квадратическая ошибка положения
определяемого пункта,
-средняя
квадратическая ошибка положения
определяемого пункта,
![]() =
10-
средняя квадратическая ошибка измерения
углов,
=
10-
средняя квадратическая ошибка измерения
углов,
![]() -углы, измеряемые
транспортиром по схеме,
-углы, измеряемые
транспортиром по схеме,
![]() -
расстояния, измеренные по схеме (м)
-
расстояния, измеренные по схеме (м)
Среднюю квадратическую ошибку координат, полученных как средние значения из двух вариантов, вычислить по формуле (5).
3. Уравнивание ходов полигонометрии 2-го разряда, образующих одну узловую точку
3.1 Общие указания и исходные данные
Для полигонометрических ходов, представленных на рисунке (7) приведены исходные данные в таблицах 6 и 7.
Заданием предусматривается выполнить уравнивание системы ходов упрощенным (раздельным) способом, разделяя уравнивание углов и координат на два этапа.
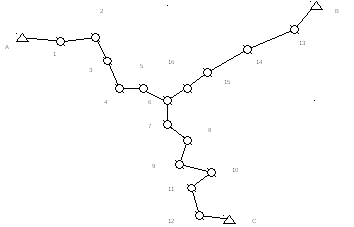
Рисунок 7 – Схема ходов полигонометрии 2-го разряда
Измеренные величины
Таблица № 6
|
№ точек |
Углы ˚ ΄ ˝ |
Стороны, м |
№ точек |
Углы ˚ ΄ ˝ |
Стороны, м |
№ точек |
Углы ˚ ΄ ˝ |
Стороны, м |
|
Ход № 1 Углы правые |
Ход № 2 Углы правые |
Ход № 3 Углы правые | ||||||
|
В |
|
|
А |
|
|
В |
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
315 07 35 |
|
В |
66 49 31 |
|
С |
27 23 02 |
|
|
|
|
497,140 |
|
|
512,727 |
|
|
504,716 |
|
1 |
180 56 35 |
|
13 |
180 00 17 |
|
12 |
180 07 36 |
|
|
|
|
502,751 |
|
|
508,706 |
|
|
506,800 |
|
2 |
179 04 17 |
|
14 |
179 59 41 |
|
11 |
179 55 48 |
|
|
|
|
500,857 |
|
|
521,445 |
|
|
497,121 |
|
3 |
180 13 31 |
|
15 |
180 00 03 |
|
10 |
180 01 20 |
|
|
|
|
511,387 |
|
|
427,178 |
|
|
454,503 |
|
4 |
180 25 45 |
|
16 |
150 22 50 |
|
9 |
202 28 31 |
|
|
|
|
478,306 |
|
|
481,219 |
|
|
411,747 |
|
5 |
180 00 43 |
|
6 |
267 59 46 |
|
8 |
183 44 42 |
|
|
|
|
511,497 |
|
|
|
|
|
354,236 |
|
6 |
169 23 44 |
|
7 |
|
|
7 |
147 38 48 |
|
|
|
|
|
|
|
|
|
|
339,469 |
|
|
|
|
|
|
|
6 |
|
|
Данные по исходным пунктам. Таблица 7
|
Обозначение исходных пунктов |
Углы, ˚ ΄ ˝ |
Дирекционные углы ˚ ΄ ˝ |
Стороны, м |
Координаты | |
|
Х, м |
Y.м | ||||
|
1 |
2 |
3 |
4 |
5 |
6 |
|
А В С А |
43 54 55 103 52 34 32 12 31 |
119 13 29+Δα |
3301,47 4296,16 6013,30
|
2324446,33+Δх |
9450336,72+Δy |
|
|
| ||||
|
|
|
| |||
|
|
|
| |||
В
таблице 7- Δα = 1˚ № гр.+1΄ 01№ ,
![]() 1000м
№гр.+10,10 №. где
1000м
№гр.+10,10 №. где
№ гр.- номер группы, №- индивидуальный номер для студента, выдаваемый преподавателем.