

TMM
.pdfПродолжение прил. В
Здесь τц = 0,5; Θ'max = 2; Θ''max = π.
ПРИМЕЧАНИЕ.
При абсолютно жестких звеньях оптимальным законом изменения ускорений является прямоугольный закон, так как этому закону отвечает наименьшее значение Θ''max. Однако все реальные механизмы обладают упругими свойствами. При скачкообразном изменении ускорений на некоторую величину (мягкий удар) в них возбуждаются свободные колебания упругой системы, в результате чего закон изменения ускорения может оказаться значительно искаженным.
При скачках скорости (жестких ударах) дополнительные ускорения достигают еще более значительных величин.
При скачке ускорения в начале движения максимальное ускорение возрастает практически в два раза, а при скачке, связанном с изменением знака, это ускорение может возрасти до трех раз. Приведенные цифры ориентировочны, так как не учитывают эффект от колебаний, возбуждаемых в предыдущих цик-
лах (рис. В.8) [11].
В быстроходных механизмах текстильных машин и машин легкой промышленности следует использовать законы движения без мягких и тем более без жестких ударов.
а
аР – реальное ускорение с учетом ударов  а0 – идеальное ускорение
а0 – идеальное ускорение
t
Рис. В.8
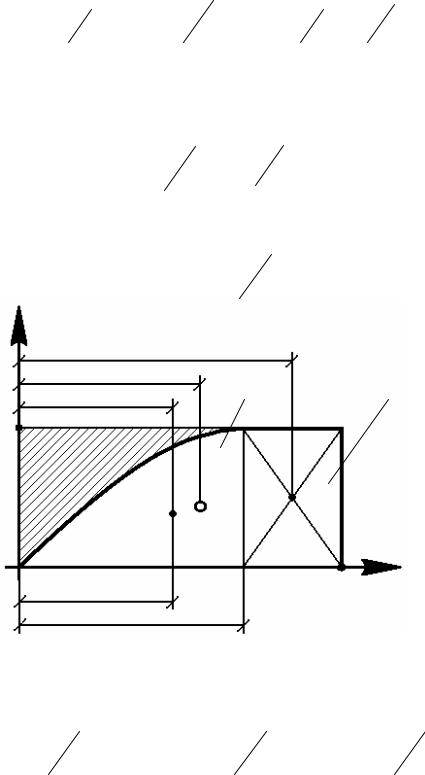
Анализ работы кулачковых механизмов позволяет сделать вывод, что во многих случаях проектирования (синтеза) профиля кулачка хорошие результаты дает использование закона ускорений в виде модифицированной трапеции, боковые стороны которой являются отрезками синусоиды (рис.В.9).
Назначение числовых значений абсцисс этих синусоид S1 и S2 позволяет синтезировать множество рациональных видов безразмерных характеристик.
Θ'' |
|
|
|
Θ''max |
|
|
|
|
|
|
1 |
0 |
S1 |
S2 |
τ |
100 |
|
Рис. В.9 |
|

Продолжение прил. В
СИНТЕЗ ЗАКОНА ПЕРЕМЕЩЕНИЯ ТОЛКАТЕЛЯ
Кроме безразмерных характеристик Θ1(τ1) и Θ3(τ3) закон движения толкателя характеризуется шестью структурными параметрами: βI, φI, βII φII, βIII, φIII. Эти параметры не могут задаваться произвольно, так как они связаны двумя условиями безударного перехода на границах участка постоянной скорости:
I |
|
|
max |
II I |
|
|
|
и |
|
I |
I |
|
II |
I |
|||
|
|
|
|
|
|
II I II I III II III II 3 max .
При синтезе закона движения толкателя можно задать, таким образом, всего четыре дополнительных условия, диктуемые требованиями конкретной задачи. Эти условия достаточно разнообразны и здесь имеет смысл ограничиться только тремя типовыми задачами, имеющими наибольшее применение в инженерной практике.
Задача 1.
Дано: βIII, φIII, Θ1(τ1), Θ3(τ3), |
II I |
|
, f |
III II |
. |
|
|
III |
|
|
I |
|
|
|
|
определяет относительную величину участка постоянной скорости, f – отношение углов поворота кулачка (или времени) выбега и разбега.
Требуется определить βI, φI, βII φII.
При решении этой задачи воспользуемся соотношениями:
|
|
1 |
1max |
, |
|
|
||
|
|
|
|
|
3max |
|
|
|
I |
(1 ) III |
, |
|
II |
(1 f 1 ) III |
, |
||
|
1 f 1 |
|
|
1 f |
||||
|
|
|
|
|
|
1 |
||
II I |
(1 1 f ) |
|
|
|
, |
|||
|
|
III |
|
|
(1 1 f ) (1 )(1 f ) 1max |
|||
|
I |
(1 ) III |
|
, |
II |
(1 f ) III |
|
|
|
1 f |
|
1 f . |
|
||||
Порядок выполнения расчетов: |
|
|
|
|
|
|||
определение δφ; |
|
|
|
|
|
|
||
определение βI, φI, βII, φII. |
|
|
|
|
|
|||
Задача 2. |
|
|
|
|
|
|
|
|
Дано: βIII, φIII, Θ1(τ1), Θ3(τ3), δβ, |
|
|
|
|||||
1max |
|
П1max |
. |
|||||
|
|
|
|
|
|
| 3max | |
| П3max |
|
101

Продолжение прил. В
Здесь 1max (П1max ) и | 3max (П3max )| – максимальные значения ускорений (второй передаточной функции) на разбеге и выбеге.
Требуется определить βI, φI, βII, φII.
При решении этой задачи воспользуемся соотношениями, а именно:
2 |
|
1max |
, f |
1 . |
|
|
3max |
|
2 |
Задача 2 сводится к условиям задачи 1. Порядок выполнения расчетов:
определение ν2;
определение f;
определение δφ;
определение βI, φI, βII, φII.
Задача 3.
Дано: βIII, φIII, λ, Пmax 1K .
Требуется определить βI, φI, βII, φII.
Эта задача синтеза возникает в случае, когда толкатель должен перемещаться на некотором участке с заданной постоянной скоростью или с заданным постоянным соотношением скоростей входного и выходного звеньев. Пример – синтез профиля кулачка в механизме раскладчика нити, синтез профилей кулачков в механизмах металлорежущих станков-автоматов и т. д.
При решении этой задачи воспользуемся соотношениями:
при заданном значении Пmax фиксируется угол наклона прямой I-II
(рис. В.7), отображающий функцию перемещения β(φ) на участке постоянной скорости.
При этом Пmax 1K,
где II |
I , II I . |
|
|
|
|
Отсюда |
K и U ( 1 / 2) 1 |
|
|
|
|
|
/ 2) 1 |
. |
|
||
далее запишем |
( 12 |
|
|
||
|
|
|
|
||
|
III K 1maxU III |
, |
|
|
|
III |
|
( 1maxU 1) III |
|
|
|
|
|
III K 1maxU III |
( 1maxU 1) |
. |
|
|
|
III |
III K |
|
|
102
Продолжение прил. В
Приведенные соотношения позволяют свести данную задачу к исходным условиям задачи 2. Существование решений задачи 3 возможно при условиях:
|
β ≥ 0 и |
φ ≥ 0; |
|
значения |
β и φ должны быть ниже значений βIII и φIII; только в этом |
случае участки разбега и выбега отличны от нуля, т. е.
III K III III K 1maxU .
Порядок выполнения расчетов:
определение ν1 и ν2;
определение U;
проверка существования решения по последнему приведенному неравен-
ству;
определение δφ и δβ;
определение f;
определение βI, φI, βII, φII.
Пример выполнения расчетов по синтезу профиля кулачка
Рассмотрим синтез закона движения толкателя на примере, соответствующем задаче 2.
Заданы следующие параметры (табл. 2.12 и 2.13):
–тип проектируемого кулачкового механизма с основными размерами (по заданию на кулачковый механизм);
–угловая скорость кулачка – ω;
–максимальный ход толкателя – βIII или Smax;
–угол удаления (рабочий ход) – РХ;
–угол дальнего выстоя (дальнего стояния) – ДВ ;
–угол возврата (холостой ход) – ХХ ;
Отдельно для рабочего и холостого ходов задаются:
– РХ и ХХ – параметры, характеризующие относительную величину участка постоянной скорости на рабочем и холостом ходах;
– РХ и ХХ – параметры, характеризующие отношение максимальных значений ускорений (вторых передаточных функций) на разбеге и выбеге;
– 1( 1) и 3 ( 3) для рабочего хода – законы ускорения толкателя для участков разбега и выбега в виде эпюр модифицированной трапеции (рис. В.10)
ссоответствующими значениями S1 и S2 (для рабочего хода);
–S1 и S2 для разбега рабочего хода и S1 и S2 (для выбега рабочего хода);
–1( 1) и 3 ( 3) для холостого хода – законы ускорения толкателя для
участков разбега и выбега в виде эпюр модифицированной трапеции (рис. В.10)
103

Продолжение прил. В
ссоответствующими значениями S1 и S2 (для холостого хода);
–S1 и S2 для разбега холостого хода и S1 и S2 (для выбега холостого хода).
Для других типовых задач решение выполняется аналогичным способом при задании соответствующих исходных данных.
В связи с тем, что методик расчета для рабочего и холостого ходов одна и та же, пример приведем только для рабочего хода толкателя механизма.
При решении ПРИМЕРА следует выполнить следующие этапы:
1.Определить постоянные 1max ( 1), 3max ( 3), 1max ( 1) и 3max ( 3) – величины пиков безразмерных скоростей и ускорений;
2.Определить вспомогательные параметры ν1, ν2, f, δφ;
3.Определить структурные параметры β1, βII, φ1, φII;
4. Построить диаграммы П( ), П ( ) и П ( ); 5. Построить профиль кулачка.
Здесь все определяемые величины зависят от вида эпюры безразмерного ускорения, т. е. от параметров S1 и S2 для рабочего и холостого ходов.
Этап 1. Определение пиков безразмерных скоростей и ускорений
1max ( 1), 3max ( 3), 1max ( 1) и 3max ( 3).
Для участка разбега рабочего хода эпюру безразмерного ускорения представим в виде рис. В.10.
Θ''1
τС3
τЦ1
τС2 |
3 |
Θ''1max
τС1
1
С2 |
Ц1 |
С1 |
С3 |
2
0 |
2S1/π |
2S2/π |
1 |
τ |
|
S1 |
S2 |
|
|
Рис. В.10. Эпюра безразмерного ускорения на участке разбега рабочего хода
104

Продолжение прил. В
При заданных S1 и S2 площадь всей эпюры состоит из трех площадей:
F1 – площадь фигуры, ограниченной синусоидой с основанием, равным S1; F2 – площадь прямоугольника с основанием, равным 1 – (S1 + S2);
F3 – площадь фигуры, ограниченной косинусоидой с основанием S2; Общая площадь эпюры безразмерных ускорений определится из
F F1 F2 F3.
Для определения пика безразмерной скорости 1max ( 1) используем
1max |
|
1 |
|
, где Ц |
|
|
F1 1 F2 2 F3 3 |
. |
(В.2) |
|
|
|
1 |
|
|||||||
|
1 Ц |
|
|
|
F1 F2 |
F3 |
|
|||
|
1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
τЦ1 – абсцисса центра тяжести эпюры безразмерного ускорения Θ''1(τ1). Площади отдельных фигур и координаты их центров тяжести определим
из: |
|
|
|
|
2S1 1 |
|
|
|
|
|
|
|
|
2S |
|
|
|
|||
F 2ab |
|
|
|
; |
|
|
|
|
2a |
|
|
; |
|
|||||||
|
max |
|
|
c1 |
|
|
1 |
|
|
|||||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
F2 1 S1 |
S2 1max ; |
|
|
|
|
|
1 S |
S |
2 |
|
S1; |
|
||||||||
|
C2 |
|
|
1 |
|
|
|
|
|
|||||||||||
|
2 |
|
|
|
|
|
||||||||||||||
|
|
|
2S2 1max |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
F 2ab |
|
|
; |
c3 |
1 2a |
1 2S2 |
. |
|||||||||||||
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Полученные значения подставляем в (В.2).
Для расчета пика безразмерного ускорения следует предварительно определить коэффициент заполнения μ
FФ FОП F F,
где F = 1 1max– площадь описанного около эпюры 1( 1) прямоугольника.
Затем рассчитывается
1max |
1max |
|
1 |
(1 |
ц ) |
. |
|
|
|
|
Для участка выбега рабочего хода эпюру безразмерного ускорения представим в виде рис. В.11.
Здесь основными расчетными зависимостями будут:
– общая площадь эпюры безразмерных ускорений F F1 F2.
– пик безразмерной скорости 3max |
|
1 |
, где Ц3 |
|
F1 1 F2 2 |
. |
|
|
|||||
|
1 Ц3 |
|
|
F1 F2 |
||
105
Продолжение прил. В
Площади отдельных фигур и координаты их центров тяжести определим
из:
F |
2ab |
|
|
2S1 3 |
; |
|
2a |
|
2S |
; |
|
|
max |
c1 |
1 |
||||||||
1 |
|
|
|
|
|
|
|
|
|||
|
F2 (1 S1) 3max ; |
C2 |
|
1 S1 |
|
S1. |
|
||||
|
2 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Для расчета пика безразмерного ускорения следует предварительно определить коэффициент заполнения μ
FФ FОП F F,
где F = 1 3max – площадь описанного около эпюры 3 ( 3) прямоугольника.
Затем рассчитывается
3max |
3max . |
|
Θ''3 |
|
|
τС2 |
|
|
τЦ3 |
|
|
τС1 |
1 |
2 |
Θ''3max |
|
|
Ц3 С1 С2
0 |
2S1/π |
1 |
τ |
|
|
S1 |
|
Рис. В.11. Эпюра безразмерного ускорения на участке выбега рабочего хода
Этап 2. Определение вспомогательные параметры ν1, ν2, f, δφ.
Воспользуемся соотношениями
1 |
|
1max |
, 2 |
|
1max |
, f |
1 . |
||
|
|
3max |
|
|
3max |
|
|
2 |
|
|
|
|
|
|
(1 1 f ) |
|
, |
|
|
|
|
|
|
|
|
|
|
||
(1 1 f ) (1 )(1 f ) 1max
106
Продолжение прил. В
Этап 3. Определение структурных параметров β1, βII, φ1, φII.
Воспользуемся соотношениями
|
|
|
I |
|
1 |
|
III |
мм, |
|
II |
|
1 f 1 |
|
III |
мм, |
|||||||
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
1 f 1 |
|
|
|
|
|
1 f 1 |
|
|
|||||||||||
|
I |
|
1 |
|
III |
угл. град, |
|
II |
|
1 f |
|
III |
угл. град. |
|||||||||
|
|
|||||||||||||||||||||
|
|
|
1 f |
|
|
|
|
|
|
|
1 f |
|
|
|||||||||
Максимальное перемещение толкателя (βIII = Smax) и рабочий угол поворота кулачка при дальнем выстое толкателя (φIII) заданы в исходных данных.
Этап 4. Построение диаграмм П( ), П ( ) и П ( ).
Для построения диаграмм используется распечатка, полученная с ПК после проверки основных параметров расчета. В распечатке для участков разбега, постоянной скорости и выбега на рабочем и холостом ходах выдается по 10 значений определяемых параметров, а также значения углов давления.
Студенты заочной формы обучения используют готовые данные, помещен-
ные в табл. 2.14 – 2.23.
Этап 5. Построение профиля кулачка.
Построение профилей кулачков поясняется далее.
СИНТЕЗ ПРОФИЛЯ КУЛАЧКА ДЛЯ РАЗЛИЧНЫХ ВИДОВ КУЛАЧКОВЫХ МЕХАНИЗМОВ
Профиль кулачка можно спроектировать двумя методами: графоаналитическим и аналитическим. Графоаналитический метод является приближенным. Он выполняется для проверки расчетов, выполненных аналитическим методом, когда при расчете и изготовлении кулачка используется ПК.
Для синтеза профиля кулачка необходимо иметь кинематическую схему механизма и закон перемещения толкателя β = П(φ).
Закон перемещения толкателя в большинстве случаев получают с использованием метода безразмерных характеристических функций, учитывающего заданные динамические характеристики механизма.
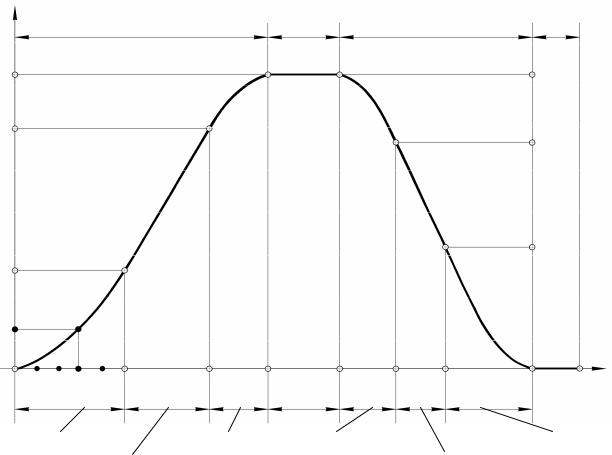
Основные параметры диаграммы β = П(φ)
На рис. В.12 представлена диаграмма перемещения толкателя β = П(φ), где β – линейное или угловое перемещение толкателя, φ – угол поворота кулачка.
Диаграмму перемещения толкателя представим в виде некоторой последовательности трех участков:
●участка рабочего (прямого) хода;
●участка дальнего выстоя;
107
Продолжение прил. В
● участка холостого (обратного) хода.
(Участок ближнего выстоя, как правило, не рассматривается).
Эти участки характеризуются следующими особенностями:
■участок разбега – изменение скорости толкателя от нуля до максимума;
■участок постоянной скорости – скорость толкателя постоянная;
■участок выбега – изменение скорости толкателя от максимума до нуля; На участке холостого хода интервал движения толкателя с постоянной
скоростью для уменьшения объема работы студенту исключается.
Закон движения толкателя (ведомого звена) определяется по следующим данным:
●βIII – максимальный ход толкателя (Smax);
●(0 ÷ φIII) – угол рабочего хода, ( РХ );
●(φIII ÷ φIV) – угол дальнего выстоя ( ДСТ );
●(φIV ÷ φVII) – угол холостого хода ( ХХ );
●законам ускорения толкателя для участков рабочего и холостого ходов.
β |
Рабочий |
Дальний |
Холостой |
Ближний |
|
(прямой) ход |
выстой |
(обратный) ход |
выстой |
βIII |
III |
|
IV |
βIV |
|
|
|
||
βII |
II |
|
V |
βV |
|
|
|
I |
|
|
|
|
VI |
βVI |
|
βI |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
βi |
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VII |
φ |
0 |
2 4 φi 8 φI |
φII |
φIII |
φIV |
φV |
φVI |
φVII |
3600 |
|
Разбег |
Выбег |
|
Разбег |
|
|
|
Выбег |
Участок постоянной скорости |
|
|
Участок постоянной скорости |
|||||
Рис. В.12. Общий вид закона движения толкателя
108

Продолжение прил. В
В результате выполненных расчетов по методике, изложенной ранее, студент определяет структурные параметры диаграммы β = П(φ) (координаты основных точек диаграммы):
I I, I ; II II, II ; III III, III ; IV IV, IV ;V V, V ; VI VI, VI .
После проверки на ПК контрольного примера студент получает распечатку данных для диаграмм:
П( ) – перемещение толкателя;
П ( ) – первая передаточная функция (аналог скорости);
П ( ) – вторая передаточная функция (аналог ускорения).
Студенты заочной формы обучения используют готовые данные, помещен-
ные в табл. 2.14 – 2.23.
Как уже отмечалось, каждый из участков рабочего и холостого ходов в распечатке по оси абсцисс разделен на 10 равных частей, т. е. имеются 10 точек с соответствующими координатами, по которым строят диаграммы β(φ),
β'(φ), β''(φ).
Пример такой диаграммы приведен на рис. В.13.
Понятие о методе обращенного движения
Для нахождения профиля кулачка любой конструкции механизма удобно использовать метод обращенного движения. Суть метода состоит в том, что всей системе (кулачок и толкатель) задается дополнительное движение вокруг оси вращения кулачка с угловой скоростью ( кул ). Кулачок, имея угловую
скорость ( кул ) и получив дополнительную угловую скорость ( кул ),
останавливается, а толкатель движется вокруг кулачка со скоростью ( кул ).
При обращенном движении характер относительных перемещений между кулачком и толкателем остается таким же, как и при обычном движении
Графоаналитический метод синтеза профиля кулачка Синтез профиля кулачка при поступательном движении толкателя
Рассмотрим синтез профиля кулачка для нецентрального (внецентренного) кулачкового механизма.
При синтезе профиля кулачка используются следующие данные: r0 – радиус начальной шайбы практического профиля;
– радиус ролика;
R0=r0 + – радиус начальной шайбы теоретического профиля;
е– эксцентриситет;
– данные диаграммы перемещения толкателя (см. распечатку).
109