

Кибернетика
Общая Основные методы
(теоретическая) исследования систем Прикладная
управления
Теория Системный Техническая
информации анализ кибернетика
Теория Исследование Биологическая
программирования операций кибернетика
Математика Имитационное Бионика
моделирование
Теория систем Планирование Экономическая
управления экспериментов кибернетика
Физика Распознавание Военная
объектов, явлений кибернетика
и ситуаций
Философия “Чёрный” и Строительная
“ белый” ящик кибернетика
Психология Экспертные Математическая
оценки лингвистика
Физиология
Экономика
Логика
Электротехника
Рис. 2.3. Кибернетика как совокупность наук
С точки зрения кибернетики имеется наличие изоморфизма в структуре и функциях управления в живых организмах, машинах и других системах. Организмы живой природы, которые рассматриваются с точки зрения управления и связи, существенно не отличаются от других сложных динамических систем, в частности, от автоматических линий. Например, структура нервных волокон человека в некоторой степени сходны со структурой связей автоматики и построена на одних и тех же принципах. Накопление и переработка информации у них имеет дискретный характер.
В живых, так и в неживых системах имеется другое структурное свойство, заключающееся в наличии у них контура обратной связи. Поэтому некоторые существенные особенности систем можно имитировать с помощью вычислительных машин. На изоморфизме основываются методы статистических испытаний с помощью вычислительной техники. Эти методы в настоящее время применяются в управлении производством.
Возможность моделирования с помощью вычислительной техники любых сложных динамических систем, процессов и ситуаций, в том числе процессов производства, позволяет считать, что вычислительная техника может быть изоморфной любой динамической системе. Поэтому эту технику можно называть кибернетической.
Обратная связь. Для систем любой природы необходимым условием их эффективного функционирования является наличие обратной связи, сигнализирующей о достигнутых результатах. На основании полученной информации о результатах функционирования системы идет процесс корректировки управляющего воздействия. Система обратной связи в упрощенном виде приведена на рис. 2.4.
Входная величина R воздействует на управляемый объект (процесс) и превращается в выходную величину Y. Величина Y с помощью канала обратной связи подается на вход, регулирует входную величину R и в виде управляющего сигнала X воздействует уже по-новому на управляемый объект (процесс).

Вход
Управляемый объект (процесс) Выход

R X Y
Обратная связь
Рис. 2. 4. Схема системы c обратной связью
В результате возникает связь, образующая замкнутый контур. Различают две формы связи: отрицательную и положительную. Отрицательная обратная связь уменьшает отклонение выходной величины от заданного значения, то есть стремится установить и поддерживать некоторое устойчивое равновесие.
Обратная связь с точки зрения кибернетики является информационным процессом, так как связана с переработкой информации, поступившей на вход R. Понятие обратной связи универсально. Оно используется в различных областях науки и техники. В биологических науках термин “обратная связь” часто фигурирует под названием “обратная афферентация”.
Иерархичность управления. Под иерархичностью управления понимается многоступенчатое управление, характерное для живых организмов, технических и социально-экономических систем. При иерархическом построении систем нижние уровни управления отличаются большой скоростью реакции и быстротой переработки поступающих сигналов. Чем менее разнообразны сигналы, тем быстрее реакция - ответ на информацию. По мере повышения уровня иерархии действия становятся более медленными, но отличаются большим разнообразием. Они, как правило, идут не в темпе воздействия, а могут включать в себя размышление, сопоставление и т. п. Такие принципы широко используются при построении производственных организаций.
В качестве примера на рис. 2.5 приведена схема иерархического построения производственной организации, состоящей из трех уровней.
На верхнем уровне иерархии управления (ВУУ) производственной организации находится административно-управленческий аппарат организации (генеральный директор, технический директор, директор по экономике и финансам), выдающие управленческие решения и команды на средний уровень управления (СУУ) - уровень цехов. После определенной переработки управленческой информации на среднем уровне информация поступает на нижний уровень иерархии управления (НУУ) - участки. Результаты переработки информации на нижнем уровне по каналам обратной связи передаются на верхний уровень управления. В случае отклонения хода процесса производства от заранее запланированных величин объемов реализуемой продукции, производительности труда и т.п. с помощью действий на верхнем уровне иерархии управления осуществляется регулирование хода процесса производства продукции.
В общем случае управление с иерархической структурой основано на том, что каждая из подсистем решает некоторую частную задачу в условиях относительной самостоятельности. Управленческие решения, в частности, прогнозные и оперативные планы, разработанные на верхнем уровне управления, постоянно координируются этим уровнем. При итеративном характере выработки управленческих решений подсистем надлежащего уровня, их последующая координация верхним уровнем осуществляется во времени многократно.
Внешняя
среда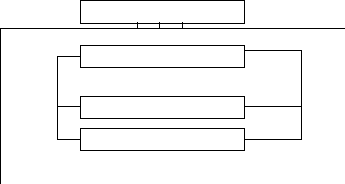
Управляющая
Верхний уровень управления (ВУУ) информация
Обратная Прямая
связь Средний уровень управления (СУУ) связь
Нижний уровень управления (НУУ)
Информация о выполнении
управляющих воздействий Внутренняя среда
Рис. 2. 5. Схема иерархического построения производственной организации
В вычислительных машинах принцип иерархичности управления наиболее полно реализуется при микропрограммном управлении. В таком случае из центрального устройства на блоки местного устройства поступает обобщенный сигнал - код операции. Например, “сложить”, “умножить”. Местное устройство управления разбивает всю операцию на простые микрооперации или микрокоманды, выполняемые затем в необходимой последовательности.
Деление целого на подсистемы. Множество элементов, составляющих систему, объединяются в нее по определенному признаку или правилу. При введении некоторых дополнительных признаков и правил все множество элементов системы можно разделить на подмножества, выделяя тем самым из системы ее составные части - подсистемы.
Таким образом, любая система, состоящая из целого, в то же время состоит из множества подсистем, каждую из которых можно рассматривать как самостоятельную обособленную систему. И наоборот, любая система, представляющая собой нечто целое, в то же время является частью, подсистемой более масштабной системы.
Динамическая локализация. В кибернетических системах благодаря наличию связей между элементами реализуется принцип динамического размещения, то есть локализации информации, при которой сообщения передаются во временной последовательности по каналам связи. Следовательно, основным свойством динамической системы является организация структуры памяти в виде временной последовательности.
Тем не менее это не исключает статического размещения информации в элементах системы в течение определенного времени. Однако, последовательная во времени пересылка сообщений между элементами является главной предпосылкой организации функционирования такого множества элементов как система. В общем случае из-за свойств дискретности процессов передачи информации представление о динамической локализации является обобщением понятия статической локализации и лежит в основе процессов ее сохранения в системе, которая может рассматриваться как структура памяти.
Любая система может быть рассмотрена как система памяти, организованная в соответствии с принципом динамической локализации. Одним из частных свойств системы в целом и отдельных ее элементов является свойство устойчивости к влиянию входных воздействий - свойство самовыравнивания. Свойство самовыравнивания определяется способностью элемента перейти под влиянием скачкообразно нанесенного входного воздействия в новое установившееся состояние без помощи регулятора.