

Конспект лекций по КММ
.pdf72 |
Глава 3. СТРУКТУРА МЕХАТРОННЫХ МОДУЛЕЙ |
второго контура A5B2’C5’D5’
S2 3 (4 2)1 1.
C5 2
1
A5
C5’ 3
1
A5
4
D5
B2
B2’
D5’
5
а)
4
D5
B1
B1’
D5’
5
в)
6 |
|
4 |
6 |
|
|
|
|
|
|
D5 |
|
|
1 |
B2 |
|
|
|
|
|
|
A5 |
|
|
|
|
B2’ |
|
|
|
D5’ |
|
|
|
|
5 |
7 |
|
б) |
7 |
|
|
|
6 |
|
|
|
6 |
|
|
|
|
|
|
|
|
|
4 |
|
|
|
2 |
D5 |
|
|
|
|
|
|
|
1 |
C5 |
|
|
|
|
|
|
|
A5 |
|
|
B1 |
|
|
|
|
|
|
|
|
|
B1’ |
C5’
3 D5’
5
7 |
7 |
г)
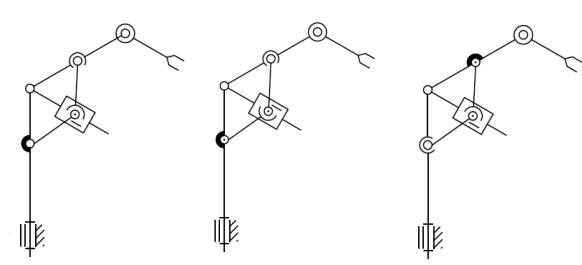
Рис. 3.7
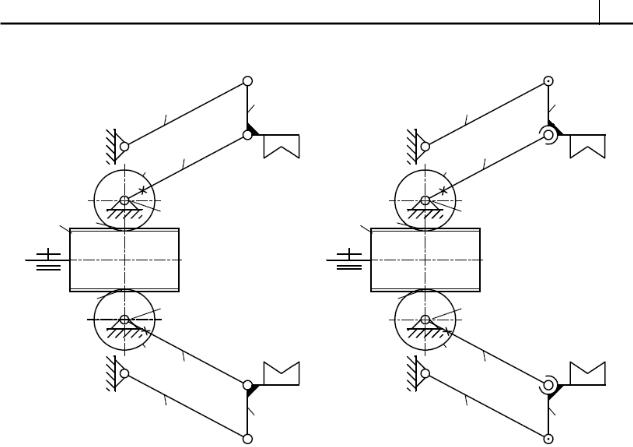
Находим число избыточных звеньев каждого замкнутого контура, не влияющих на функциональные движения рабочих элементов захватного устройства. Такими элементами являются ролики 2 и 3, так как они не оказывают никакого влияния на движение рабочих элементов. Они только заменяют трение скольжения на трение качения, т.е. улучшают процесс взаимодействия кулачка и толкателя.
Вычисляем число степеней подвижности механизма:
5 |
K |
K |
|
|
|
|
W 6n ipi |
S j z j 6 |
5 |
2 2 |
5 5 1 1 2 |
1; |
|
i 1 |
j 1 |
j 1 |
|
|
|
|

СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМОВ МЕХАТРОННЫХ МОДУЛЕЙ 73
или по формуле для плоских механизмов:
5 |
K |
|
|
|
|
WП 3n |
(i 3) pi Z j 3 |
5 |
(4 |
3)2 (5 3)5 2 |
1. |
i 4 |
j 1 |
|
|
|
|
Таким образом, механизм захватного устройства робота состоит из одной степени подвижности A5, четырех кинематических пар пятого класса C5, C5’, D5, D5’ и двух кинематических пар второго класса B2 и B2’. Для приведения его в движение необходимо задать одну линейную управляемую обобщенную координату, т.е. установить один привод линейного движения в паре A5.
Исключим из схемы избыточные звенья (рис. 3.7, б).
В этом случае подвижных звеньев будет три, пар пятого класса – три, пар второго класса – две, избыточных звеньев – ноль.
Число замкнутых контуров:
K 5 3 2.
Число избыточных контурных связей:
S1 3 (4 2) 1 1;
S2 3 (4 2) 1 1.
Число степеней подвижности механизма:
W 6 3 2 2 5 3 1 1 1.
Для устранения избыточных связей необходимо понизить класс некоторых кинематических пар. Заменим цилиндрические пары B2 и B2’ второго класса на сферические пары первого класса B1 и B1’ (рис. 3.7, в). В этом случае схема становится основной структурной схемой.
Число замкнутых контуров осталось прежним. Число избыточных контурных связей:
S1 3 (4 1) 1 0;
S2 3 (4 1) 1 0.
Число степеней подвижности механизма:
W 6 3 1 2 5 3 1.
Следовательно, для осуществления управляемого движения рабочих элементов необходимо задать одну управляемую обобщенную координату – линейное перемещение кулачка 1, т.е. установить один привод.
74 |
Глава 3. СТРУКТУРА МЕХАТРОННЫХ МОДУЛЕЙ |
Можно ролики 2 и 3 сохранить, но выполнить их сферической формы, т.е. пары B2 и B2’ (см. рис. 3.7, а) заменить на пары B1 и B1’ (рис. 3.7, г). Тогда число избыточных связей контуров станет:
первого контура A5B1C5D5
S1 3 (4 1)1 0;
второго контура A5’B1’C5’D5’
S2 3 (4 1)1 0.
Число степеней подвижности
W 6 5 1 2 5 5 2 1.
Таким образом, качество взаимодействия кулачка 1 с выходными звеньями 4 и 5 повыситься, но схема стала не основной, т.е. имеются два лишних звена – ролики 2 и 3.
Для приведения механизма в управляемое движение необходимо задать одну управляемую обобщенную координату – линейное перемещение кулачка 1.
Рассмотрим механизм мехатронного модуля захватного устройства робота, состоящего из зубчатой рейки 1, двух зубчатых колес 2 и 2’, к которым жестко прикреплены звенья 3 и 3’, звеньев 4 и 4’ с рабочими элементами и звеньев 5 и 5’, образующими два пантографа
(рис. 3.8, а).
Таким образом, механизм состоит из семи подвижных звеньев, двух пар второго класса и девяти пар пятого класса.
Определяем число замкнутых контуров механизма:
K 11 7 4
Вычисляем число избыточных связей: первого контура D5E2F5
S1 3 (4 2)1 1;
второго контура D5’E2’F5
S2 3 (4 2)1 1;
третьего контура A5B5C5D5
S3 3 (5 5)4 3;
четвертого контура A5’B5’C5’D5’
S4 3 (5 5)4 3.
СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМОВ МЕХАТРОННЫХ МОДУЛЕЙ 75
|
|
|
|
|
B5 |
|
|
|
|
B4 |
|
|
5 |
|
4 |
|
|
5 |
|
4 |
|
|
|
|
|
|
|
|
|
|||
|
|
A5 |
|
|
|
|
|
A5 |
|
|
|
|
|
|
3 |
C5 |
|
|
|
3 |
C3 |
|
|
2 |
|
|
|
2 |
|
|||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
1 |
E2 |
|
D5 |
|
1 |
E1 |
D5 |
|
|
|
|
|
|
|
|
|
|
|
|||
F5 |
|
|
|
|
|
F5 |
|
|
|
|
|
E2’ |
|
D5’ |
|
|
E1’ |
D5’ |
|
||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||
|
|
2’ |
3’ |
C5’ |
|
|
2’ |
|
C3’ |
|
|
|
|
|
|
|
3’ |
||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
A5’ |
|
|
|
|
|
A5’ |
|
|
|
|
|
|
5’ |
4’ |
|
|
5’ |
|
4’ |
|
|
а) |
|
|
B5’ |
|
|
б) |
|
B4’ |
|
|
|
|
|
|
|
|
|
||
Рис. 3.8
Таким образом, число избыточных связей контуров всего механизма равно:
S 1 1 3 3 8.
Число степеней подвижности механизма
W 6 7 2 2 5 9 8 1.
Следовательно, для приведения механизма захватного устройства в управляемое движение необходимо задать одну управляемую обобщенную координату – линейное перемещение рейки 1. Для этого необходимо установить один привод в паре F5.
Устранить избыточные связи в первом и втором контурах можно заменой двух кинематиских пар второго класса E2 и E2’ на две кинематические пары первого класса E1 и E1’.
Устранить избыточные контурные связи в третьем и четвертом контурах можно заменой в третьем контуре кинематических пар пятого класса C5 и B5 на кинематические пары третьего C3 и четвертого B4 классов соответственно, а в четвертом контуре C5’ на C3’ и B5’ на
B4’ (рис. 3.8, б) или заменой D5 и D5’ на D3 и D3’, а также В5 и В5’ на В4 и В4’. Таким образом, устранение избыточных контурных связей
представляет собой многовариантную задачу.
76 |
Глава 3. СТРУКТУРА МЕХАТРОННЫХ МОДУЛЕЙ |
Число избыточных связей контуров будет равно:
S1 3 (4 1)1 0;
S2 3 (4 1)1 0;
S3 3 (5 3)1 (5 4)1 0;
S4 3 (5 3)1 (5 4)1 0.
Число степеней подвижности механизма осталось прежним:
W 6 7 1 2 3 2 4 2 5 5 1.
Устранение избыточных контурных связей приводит к ликвидации заклинивания в кинематических парах и соответственно к снижению износа в них, увеличению точности работы механизма, его долговечности и надежности, т.е. к улучшению его качественных характеристик.
Рассмотрим мехатронный модуль двигателя внутреннего сгорания автомобиля, изображенный на рис. 3.9, а. Он состоит из трех звеньев 1, 2 и 3 и четырех пар пятого класса А5, В5, С5 и С5’.
Вычисляем число замкнутых контуров:
K 4 3 1.
Находим число избыточных связей замкнутого контура:
S 3 (5 5)4 3.
а) |
б) |
в)
Рис. 3.9
Определяем число степеней подвижности механизма:
W 6 3 5 4 3 1.

СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМОВ МЕХАТРОННЫХ МОДУЛЕЙ 77
Таким образом, механизм содержит одну степень подвижности А5 и три кинематические пары В5, С5 и С5’.
Для устранения избыточных контурных связей понижаем класс кинематических пар: В5 заменяем на В4 и С5 на С3 (рис. 3.9, б). Тогда
S 3 (5 3)1 (5 4)1 0.
Число степеней подвижности:
W 6 3 3 1 4 1 5 2 1.
Можно устранить избыточные связи заменой кинематической пары В5 на В4, а также введением кинематического соединения с одним дополнительным (лишним) звеном 4 и двумя вращательными парами D5 и C4, а также одной поступательной парой С4’ (рис. 3.9, в).
В этом случае число замкнутых контуров будет равно:
K 5 4 1.
Число избыточных контурных связей:
S1 3 (5 4)3 0.
Число степеней подвижности мехатронного модуля останется прежним:
W 6 4 4 3 5 2 1 1.
Рассмотрим винтовой дифференциальный механизм мехатронного модуля (рис. 3.10, а). Он состоит из винта 1, имеющего два участка с резьбой разных шагов одного направления, гайки 2, стойки 3 и шариковой направляющей 4. Таким образом механизм содержит два подвижных звена 1 и 2, две пары пятого класса А5 и В5 и одну пару второго класса С2.
При вращении шариковой направляющей 4 винт 1 совершает угловое и линейное движения. При этом гайка 2 совершает 2 поступательных движения: переносное движение вместе с винтом относительно стойки 3 и движение относительно винта 1.
A5 1 |
B5 |
C2 |
C1 |
|
|
|
M |
2 |
3 |
|
4 |
|
|
|
|
|
а) |
|
б) |
Рис. 3.10
78 |
Глава 3. СТРУКТУРА МЕХАТРОННЫХ МОДУЛЕЙ |
Число замкнутых контуров механизма:
K 3 2 1.
Число избыточных связей:
S 3 (4 2)1 1.
Число степеней подвижности:
W 6 2 2 1 5 2 1 1.
Механизм состоит из одной степени подвижности C2 и двух кинематических пар пятого класса A5 и B5.
Для устранения избыточных связей необходимо контакт по линии заменить на точечный контакт, т.е. пару второго класса С2 заменить на пару первого класса С1 – в направляющей 4 ряды шариков заменить на одиночные шарики (рис. 3.10, б).
Вычисляем число избыточных связей:
S 3 (4 1) 0.
Тогда число степеней подвижности механизма будет равно:
W 6 2 1 1 5 2 1.
Таким образом, для приведения механизма в управляемое движение необходимо задать одну управляемую обобщенную координату – угловое движение направляющей 4, т.е. установить один привод.
На рис. 3.11 представлен мехатронный модуль кисти робота, состоящий из трех подвижных звеньев, одной кинематической пары второго класса и трех кинематических пар пятого класса.
|
C2 |
A5 |
B5 |
M2 |
M1 |
Рис. 3.11
Число замкнутых контуров модуля:
K 4 3 1.
СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМОВ МЕХАТРОННЫХ МОДУЛЕЙ 79
Число избыточных контурных связей:
S 3 (4 2)1 1.
Число степеней подвижности:
W 6 3 2 1 5 3 1 2.
Для устранения избыточных связей необходимо кинематическую пару второго класса С2 заменить на кинематическую пару первого класса С1.
Тогда число избыточных контурных связей механизма будет равно:
S 3 (4 1) 0;
Число степеней подвижности мехатронного модуля не измени-
лось:
W 6 3 1 1 5 3 2.
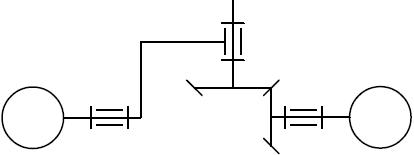
Механизм робота, изображенный на рис. 3.12, состоит из семи подвижных звеньев, одной пары третьего класса, двух пар четвертого класса и шести пар пятого класса.
Вычисляем число замкнутых контуров:
|
K 9 7 2. |
|
|
Находим избыточные связи: |
|
|
|
первого контура B5C5D4E5 |
|
|
|
|
S1 3 (5 4)1 2; |
|
|
|
|
2D4 |
F5 |
|
C5 |
|
|
|
|
|
|
B3 |
E5 |
M5 |
G3 |
B5 |
|
||
|
|
|
|
|
A5 |
|
|
Рис. 3.12
80 |
Глава 3. СТРУКТУРА МЕХАТРОННЫХ МОДУЛЕЙ |
второго контура D4F5G3M5
S2 3 (5 3)1 (5 4)1 0.
Определяем число степеней подвижности механизма:
W 6 7 3 1 4 2 5 6 2 3.
Таким образом, для приведения механизма в движение необходимо установить три привода в парах А5, Е5, М5.
Устранить избыточные связи в первом контуре можно заменой пары пятого класса В5 на пару третьего класса В3. Тогда получим:
S1 3 (5 3)1 (5 4)1 0.
При этом число степеней подвижности механизма не изменится:
W 6 7 3 2 4 2 5 5 3.
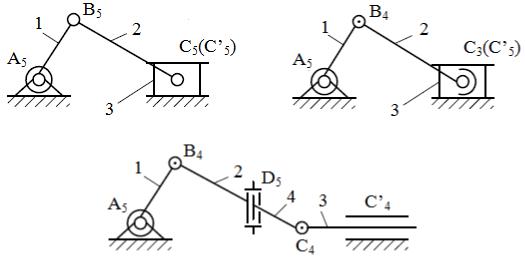
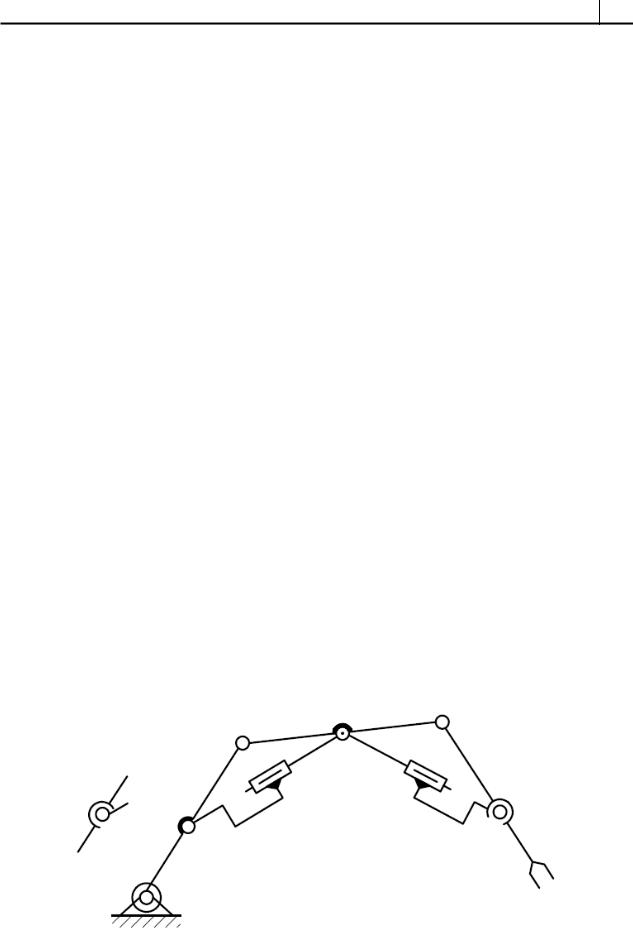
Рассмотрим исполнительный механизм робота, состоящий из семи подвижных звеньев, двух пар третьего класса, одной пары четвертого класса и шести пар пятого класса (рис. 3.13, а).
Число замкнутых контуров:
K 9 7 2.
Число избыточных связей первого контура B5,C5,D5’’,D4’:
S1 3 (5 4) 1 2.
Число избыточных связей второго контура С5’,E3,D3,D5”:
S2 3 (5 3) 2 1.
G5 |
G5 |
G5 |
E3 |
E3 |
E3 |
C5(C’5) |
C5(C’5) |
C5(C’5) |
|
B5 |
D3(D’4,D’’5) |
B4 |
D4(D’3,D’’5) |
B3 |
D3(D’4,D’’3) |
|
|
|
A5 |
A5 |
A5 |
а) |
б) |
в) |
|
|
Рис. 3.13 |

СТРУКТУРНЫЙ СИНТЕЗ МЕХАНИЗМОВ МЕХАТРОННЫХ МОДУЛЕЙ 81
Исполнительный механизм содержит две избыточные контурные связи и одну лишнюю контурную подвижность.
Вычисляем число степеней подвижности исполнительного механизма робота:
W 6 7 3 2 4 1 5 6 2 1 3.
Следовательно, для приведения механизма в управляемое движение необходимо задать три управляемые обобщенные координаты, т.е. установить три привода: два привода углового движения в степенях подвижности A5 и G5 и один привод линейного движения в степени подвижности D5’’.
Для устранения избыточных контурных связей и лишних подвижностей необходимо в первом контуре понизить класс двух кинематических пар, например, В5 заменить на В4 и D4’ заменить на D3’, а во втором контуре повысить класс одной кинематической пары, т.е. D3 заменить на D4 (рис.3.13, б).
В этом случае число избыточных связей первого В4,C5,D5’’,D3’ и второго С5’,E3,D4,D5’’ контуров будет равно:
S1,2 3 (5 3)1 (5 4)1 0.
При этом число степеней подвижности исполнительного механизма робота останется прежним:
W 6 7 3 2 4 2 5 5 3.
Устранить избыточные контурные связи и лишние подвижности также можно заменяя в первом контуре В5 на В3, а во втором контуре
Е3 на Е4 (рис. 3.13, в).
Таким образом, устранение избыточных контурных связей и лишних подвижностей является многовариантным процессом.
Методика структурного анализа механизмов мехатронных модулей позволяет кинематические пары и степени подвижности на структурных и кинематических схемах изображать так, чтобы можно было легко различать, где находится кинематическая пара, а где – степень подвижности. Она дает возможность определять число избыточных связей и лишних подвижностей каждого замкнутого контура механизма, а также число степеней подвижности всего механизма, что позволяет проектировать рациональные механизмы, обеспечивающие более высокое качество их функционирования.
3.4. Структурный синтез механизмов мехатронных модулей
Структурный синтез механизмов – проектирование структур-
ных схем механизмов по заданным условиям.