

Конспект лекций по КММ
.pdfЕгоров О.Д.
Конспект лекций по дисциплине " Конструирование мехатронных модулей"

ОГЛАВЛЕНИЕ |
3 |
ОГЛАВЛЕНИЕ |
|
ПРЕДИСЛОВИЕ .......................................................................................... |
7 |
Глава 1. ОСНОВЫ СТАНОВЛЕНИЯ МЕХАТРОННЫХ УСТРОЙСТВ. 8
1.1. От механики к мехатронике............................................................ |
8 |
1.2. Мехатронные устройства .............................................................. |
12 |
Глава 2. МЕХАТРОННЫЕ МОДУЛИ...................................................... |
15 |
2.1. Классификация мехатронных модулей........................................ |
15 |
2.2. Модули движения .......................................................................... |
17 |
2.3. Мехатронные модули движения................................................... |
35 |
2.4. Состав мехатронного модуля движения...................................... |
46 |
2.5. Интеллектуальные мехатронные модули .................................... |
47 |
2.6. Примеры интеллектуальных мехатронных модулей ................. |
51 |
Глава 3. СТРУКТУРА МЕХАТРОННЫХ МОДУЛЕЙ ........................... |
57 |
3.1. Компоненты мехатронных модулей ............................................ |
57 |
3.2. Структура механизмов мехатронных модулей ........................... |
63 |
3.3. Структурный анализ механизмов мехатронных модулей ......... |
67 |
3.4. Структурный синтез механизмов мехатронных модулей ......... |
81 |
Глава 4. ИНТЕГРАЦИЯ В МЕХАТРОННЫХ МОДУЛЯХ .................... |
91 |
4.1. Модели мехатронных модулей ..................................................... |
91 |
4.2. Критерии интеграции мехатронных модулей ............................. |
96 |
Глава 5. КИНЕМАТИЧЕСКАЯ ТОЧНОСТЬ МЕХАТРОННЫХ |
|
МОДУЛЕЙ................................................................................. |
115 |
5.1. Погрешность системы управления и двигателя ....................... |
115 |
5.2. Кинематическая погрешность и мертвый ход преобразователей |
|
движения ....................................................................................... |
115 |

4 |
ОГЛАВЛЕНИЕ |
5.3. Погрешность, вызванная податливостью преобразователя |
|
движения ....................................................................................... |
131 |
5.4. Податливость элементов преобразователей движения............ |
132 |
5.5. Приведенная податливость преобразователей движения........ |
133 |
5.6. Погрешность мехатронного модуля........................................... |
137 |
Глава 6. ОСНОВЫ КОНСТРУИРОВАНИЯ ТЕХНИЧЕСКИХ |
|
ОБЪЕКТОВ................................................................................ |
138 |
6.1. Цель, задачи и методы конструирования .................................. |
138 |
6.2. Основные этапы конструирования............................................. |
140 |
6.3. Разработка концепции технического объекта........................... |
141 |
6.4. Методы конструирования ........................................................... |
144 |
6.5. Трудности конструирования ....................................................... |
149 |
6.6. Профессиональные качества и способности, необходимые |
|
конструктору ................................................................................ |
150 |
Глава 7. ОСНОВЫ КОНСТРУИРОВАНИЯ МЕХАТРОННЫХ |
|
МОДУЛЕЙ................................................................................. |
152 |
7.1. Общие положения конструирования ......................................... |
152 |
7.2. Системный подход при конструировании мехатронных |
|
модулей ......................................................................................... |
154 |
7.3. Синергетическая интеграция при конструировании................ |
155 |
7.4. Этапы конструирования .............................................................. |
156 |
7.5. Основы методики конструирования мехатронных модулей... |
159 |
7.5.1. Техническое задание ............................................................. |
160 |
7.5.2. Анализ взаимосвязей мехатронного модуля с внешним |
|
окружением ............................................................................ |
161 |
7.5.3. Разработка технических требований ................................... |
162 |
7.5.4. Предварительное конструирование основных частей |
|
мехатронного модуля............................................................ |
164 |
7.5.5. Разработка вариантов эскизной компановки мехатронного |
|
модуля..................................................................................... |
166 |
7.5.6. Чертеж эскизной компоновки .............................................. |
168 |

ОГЛАВЛЕНИЕ |
5 |
7.5.7. Компактность конструкции.................................................. |
171 |
7.5.8. Чертеж окончательной компоновки .................................... |
172 |
7.5.9. Конструирование с использованием систем |
|
автоматизированного проектирования ............................... |
175 |
7.5.10. Типы и стадии разработки конструкторской |
|
документации......................................................................... |
182 |
Глава 8. ЭЛЕКТРОДВИГАТЕЛИ ........................................................... |
189 |
8.1. Электродвигатели углового движения ...................................... |
189 |
8.1.1. Электродвигатели постоянного тока................................... |
190 |
8.1.2. Электродвигатели переменного тока .................................. |
193 |
8.2. Линейные электродвигатели ....................................................... |
199 |
8.3. Энергетический расчет мехатронного модуля |
|
с электродвигателем углового движения .................................. |
204 |
8.3.1. Энергетический расчет универсального мехатронного |
|
модуля при незначительных динамических нагрузках..... |
206 |
8.3.2. Энергетический расчет универсального мехатронного |
|
модуля при значительных динамических нагрузках......... |
208 |
8.3.3. Передаточное отношение преобразователя движения ...... |
210 |
8.3.4. Оптимизация выбора силовых элементов .......................... |
211 |
Глава 9. ПРЕОБРАЗОВАТЕЛИ ДВИЖЕНИЯ ....................................... |
213 |
9.1. Винтовая передача качения......................................................... |
213 |
9.2. Винтовая передача скольжения .................................................. |
228 |
9.3. Дифференциальная и интегральная передача винт-гайка ....... |
233 |
9.4. Реечная передача .......................................................................... |
235 |
9.5. Волновая зубчатая передача ....................................................... |
251 |
9.6. Планетарные передачи ................................................................ |
264 |
9.7. Передачи с гибкой связью........................................................... |
285 |
Глава 10. ЛЮФТОВЫБИРАЮЩИЕ МЕХАНИЗМЫ........................... |
291 |
10.1. Выборка мертвого хода в винтовых механизмах ................... |
291 |

6 |
ОГЛАВЛЕНИЕ |
10.2. Выборка мертвого хода в зубчатых механизмах .................... |
292 |
Глава 11. ТОРМОЗНЫЕ УСТРОЙСТВА............................................... |
297 |
11.1. Механические тормозные устройства ..................................... |
297 |
11.2. Электромагнитные фрикционные тормозные устройства..... |
299 |
Глава 12. НАПРАВЛЯЮЩИЕ ............................................................... |
305 |
12.1. Направляющие с трением скольжения .................................... |
305 |
12.2. Направляющие с трением качения........................................... |
310 |
12.3. Шариковые LM – направляющие............................................. |
312 |
12.4. Шарикосплайновые направляющие......................................... |
317 |
12.5. Расчет LM – направляющих на долговечность....................... |
323 |
12.6.Расчет шарикосплайновых направляющих на долговечность 326
12.7.Расчет LM – и шарикосплайновых направляющих
на статическую грузоподъемность ........................................... |
325 |
Глава 13. ИНФОРМАЦИОННЫЕ УСТРОЙСТВА ............................... |
327 |
13.1. Датчики информации................................................................. |
327 |
13.2. Датчики положения и перемещения ........................................ |
328 |
13.3. Датчики скорости ....................................................................... |
360 |
Глава 14. НАДЕЖНОСТЬ МЕХАТРОННЫХ МОДУЛЕЙ................... |
365 |
14.1. Основные понятия надежности ................................................ |
365 |
14.2. Характеристики надежности..................................................... |
366 |
14.3. Безотказность.............................................................................. |
369 |
14.4. Надежность в период нормальной эксплуатации ................... |
370 |
14.5. Надежность в период постепенных отказов ........................... |
372 |
14.6. Надежность сложных систем .................................................... |
374 |
ПРИЛОЖЕНИЯ ....................................................................................... |
377 |
СПИСОК ЛИТЕРАТУРЫ ....................................................................... |
420 |

7
ПРЕДИСЛОВИЕ
В настоящее время мехатроника является одной из наиболее быстро развивающихся отраслей науки и техники. Еѐ достижения широко применяют в различных сферах деятельности человека: робототехнике, технологических производственных процессах, медицине, космосе, под водой, в военном деле и т.д.
Важную роль в развитии мехатроники в мире сыграл бурный прогресс в области информационных, электронных и интеллектуальных технологий и их приложения к задачам управления функциональными движениями. Одновременно разрабатывались новые принципы и технологии изготовления высококачественных и компактных механических устройств, электронных блоков, двигателей углового и линейного движения, что послужило основой современных мехатронных модулей. Внимание учѐных, конструкторов, инженеров сосредоточено на создании мехатронных модулей, отвечающих самым современным требованиям качества, надѐжности и безопасности.
В учебном пособии даны общие понятия о мехатронике, широко представлены различные виды мехатронных модулей и их классификация по видам и уровням интеграции, приведена их структура и представлен структурный анализ и синтез, разработаны критерии интеграции и изложены основы конструирования мехатронных модулей
иотдельных элементов, их составляющих: преобразователей движения, люфтовыбирающих механизмов, направляющих, тормозных и информационных устройств, а также приведена методика расчета точности работы как отдельных конструктивных компонентов, так и всего мехатронного модуля в целом.
Учебное пособие предназначено для студентов, магистров и аспирантов, обучающихся по направлению “Мехатроника и робототехника”, а также может быть полезна студентам и специалистам других технических направлений, занимающихся проектированием модулей
имашин для автоматизированного машиностроения.
Авторы выражают благодарность рецензентам за труд по рецензированию рукописи и критические замечания, а также коллективу кафедры “Робототехника и мехатроника” Московского государственного технологического университета “Станкин” за помощь при подготовке учебного пособия и полезные советы.
Замечания и пожелания по улучшению содержания учебного пособия прошу направлять по адресу: 101472, Москва, Вадковский пер., д. 1, ИЦ МГТУ “Станкин”.
Авторы

8
Глава 1 ОСНОВЫ СТАНОВЛЕНИЯ МЕХАТРОННЫХ УСТРОЙСТВ
1.1. От механики к мехатронике
Термин “мехатроника” был введен японской фирмой Yaskawa Electric в 1969 году и зарегистрирован как торговая марка в 1972 году. Это название получено от комбинации слов “МЕХАника” и “элекТРОНИКА”.
Вотечественной технической литературе еще в 1950-х годах использовался подобным же образом образованный термин “механотроны”. Так назывались электронные лампы с подвижными электродами, которые применялись в качестве датчиков малых перемещений, скоростей и вибраций.
Начиная с 80-х годов в мировой технической литературе начинают применять термин “мехатроника” как название класса машин с компьютерным управлением движения.
Первоначально мехатронными устройствами считали только регулируемые электроприводы. Затем сюда стали относить автоматические двери, торговые автоматы, мобильные устройства и фотокамеры
савтофокусировкой. В 80-х годах класс мехатронных устройств пополнился станками с числовым программным управлением, промышленными роботами и новыми видами бытовых машин (посудомоечных, стиральных и т.п.). В последнее десятилетие очень большое внимание уделяют созданию мехатронных устройств для современных автомобилей, нового поколения технологического оборудования (станков с параллельной структурой, роботов с интеллектуальным управлением), микромашин, новейшей компьютерной и офисной техники.
Вмире активно издают научную и учебную литературу в области мехатроники. Первая монография на русском языке японских специалистов Т. Исии, И. Симояма, Х. Иноуэ “Мехатроника” была издана в 1998 году.
За последние годы ученые США, Европы и Азии выпустили в свет несколько книг с аналогичным названием. Многие из этих книг выдержали уже несколько изданий, что говорит о большом интересе читателей к мехатронике.
Так что же такое мехатроника? Ответ можно найти в Государственном образовательном стандарте РФ по направлению “Мехатроника и робототехника” [16].
Мехатроника – область науки и техники, основанная на синергетическом объединении механических, электротехнических, элек-
ОТ МЕХАНИКИ К МЕХАТРОНИКЕ |
9 |
тронных и компьютерных компонентов, обеспечивающая проектирование и производство качественно новых устройств с интеллектуальным управлением их функциональными движениями.
В данном определении особо подчеркнута триединая сущность мехатронных устройств, в основу построения которых заложена идея глубокой взаимосвязи механических, электронных и компьютерных элементов. Поэтому наиболее распространенным графическим символом мехатроники стали три пересекающихся круга (рис. 1.1), помещенные во внешнюю оболочку Производство – Менеджмент – Требования рынка [30].
Рис. 1.1
Предметом мехатроники являются методы проектирования и компьютерного управления мехатронных устройств, а также новые технологические и информационные процессы, которые обеспечивают все этапы их жизненного цикла, начиная со стадии маркетинга и концептуального проектирования и заканчивая производством, экс-
плуатацией и утилизацией. |
|
|
||
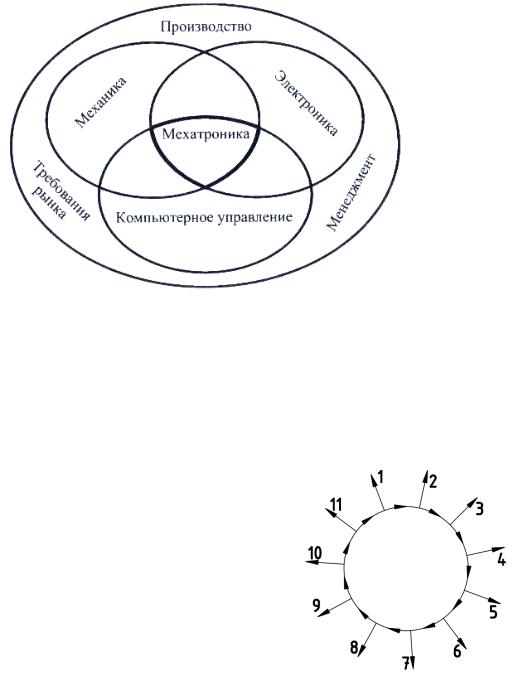
На рис. 1.2. изображена “петля каче- |
|
|||
ства” мехатронного изделия, отражающая |
|
|||
его жизненный цикл: 1 – маркетинг; 2 – |
|
|||
проектирование; |
3 |
– |
материально- |
|
техническое снабжение; 4 – подготовка и |
|
|||
разработка производственных процессов; 5 |
|
|||
– изготовление; 6 – контроль и испытание; |
|
|||
7 – упаковка и хранение; 8 – реализация; 9 – |
|
|||
монтаж и эксплуатация; 10 – техническая |
|
|||
помощь в обслуживании; 11 – утилизация. |
|
|||
В качестве единой системы компью- |
Рис. 1.2 |
|||
10 |
Глава 1. ОСНОВЫ СТАНОВЛЕНИЯ МЕХАТРОННЫХ УСТРОЙСТВ |
терной поддержки всех этапов жизненного цикла мехатронных устройств можно применить принципы CALS – технологий, идеологии интегрированного производства, развития и совершенствования системы автоматизированного проектирования мехатронных изделий, производств, технологий и систем управления.
Во многих областях техники мехатронные системы приходят на смену “механическим” машинам, которые уже не соответствуют качественным требованиям к современному оборудованию. Поэтому при проектировании современных высокоскоростных и высокоточных устройств необходимо применять мехатронный подход, заключающийся в переносе функциональной нагрузки от механических компонентов к интеллектуальным (электронным, компьютерным и информационным).
“От механики к электронике” – такова ведущая тенденция развития современного машиностроения. Чем же обусловлено такое направление в создании современного оборудования? В первую очередь
– резко возросшими требованиями рынка к потребительским свойствам и качеству продукции машиностроения и приводной техники. К ним относят:
высокие скорости движения рабочих органов машины;
сверхвысокую точность движения и обработки;
максимальную компактность конструкции
минимизацию массогабаритных показателей устройств;
способность системы к реконфигурации.
Именно эти ключевые требования определяют современные тенденции мирового индустриального развития и стимулируют науч- но-технический прогресс в области мехатроники.
Анализ показывает, что еще в начале 90-х годов прошлого века подавляющее большинство функций машин реализовывалось механическим путем. В последующие десятилетия происходило постепенное вытеснение механических компонентов сначало электронными, а затем и компьютерными блоками. В настоящее время в мехатронных системах объем функций распределен между механическими, электронными и компьютерными компонентами практически поровну.
Важно подчеркнуть, что тенденция перехода от механики к мехатронике не “закрывает” механику. Наоборот, это стимулирует ее развитие к интеграции с интеллектуальными компонентами в рамках единой мехатронной системы. Такой подход диктует новые требования к встроенным механическим и гибридным компонентам, что в свою очередь ведет к развитию новых технологий и конструкторских решений в области механики.

ОТ МЕХАНИКИ К МЕХАТРОНИКЕ |
11 |
В мехатронных устройствах укрупненно выделяют три главные части – механическую, электронную и информационную, совокупность которых и образует систему в целом. Указанные части составляют структурный базис мехатроники, который можно наглядно представить в форме пирамиды (рис. 1.3).
Исторически переход от механики к мехатронике осуществлялся постепенно, проходя ряд стадий. Первоначально три указанных базисных направлений (точная механика, электроника и информатика) интегрировались попарно, образуя три гибридные направления, которые показаны боковыми гранями пирамиды. Это электромеханика (объединение механических компонентов с электротехническими изделиями и электронными блоками), компьютерные системы управления (аппаратно-программное объединение электронных и компьютерных устройств), а также системы автоматизированного проектирования механических систем (САПР). Затем уже на стыке гибридных
направлений – возникает мехатроника [30]. |
|
|||||
Развитие машин |
|
|
||||
от чисто |
механиче- |
Механика |
Системы |
|||
ских к |
современным |
Прецизионная |
||||
автоматизированного |
||||||
мехатронным |
систе- |
механика |
проектирования |
|||
|
||||||
мам проходит после- |
|
|
||||
довательно несколько |
|
Информационные |
||||
этапов. |
Вначале это |
Электро- |
технологии |
|||
разработка |
электро- |
механика |
Информатика |
|||
механических |
систем |
|
||||
|
|
|||||
путем объединения в |
|
|
||||
приводе |
|
электриче- |
|
Компьютерные |
||
ского двигателя и ме- |
|
системы |
||||
|
управления |
|||||
ханического преобра- |
Микроэлектроника |
|||||
|
||||||
|
|
|||||
зователя |
движения с |
Электроника |
|
|||
электронными |
блока- |
|
||||
Рис. 1.3 |
|
|||||
ми. Затем в результате системного объединения электромеханических компонентов с
компьютерными устройствами управления, встроенными датчиками информации и интерфейсами были созданы мехатронные устройства.
Такой путь развития машин обусловлен появлением новых информационных технологий, отличительной чертой которых является возможность системной обработки знаний, а также современных технологий микроэлектроники, которые легли в основу новой элементной базы важнейших компонентов мехатронных устройств – силовых преобразователей, управляющих и диагностических электронных блоков, датчиков обратной связи и сенсоров. Электронные техноло-