

1.3. Оптимальные типовые процессы регулирования
О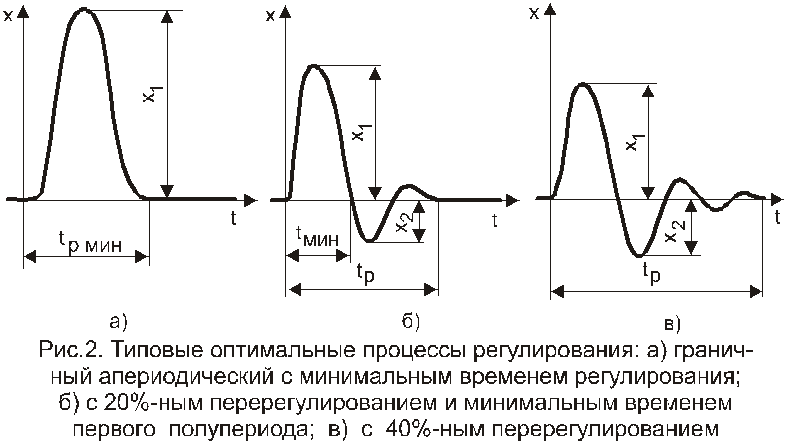 птимальный
процесс регулирования – понятие
относительное, всё зависит от конкретных
требований со стороны технологического
процесса. Наиболее часто встречаются
три типовых переходных процесса
регулирования (рис. 2):
птимальный
процесс регулирования – понятие
относительное, всё зависит от конкретных
требований со стороны технологического
процесса. Наиболее часто встречаются
три типовых переходных процесса
регулирования (рис. 2):
а) граничный апериодический процесс с минимальным временем регулирования tр(рис. 2.а);
б) процесс с 20%-ным перерегулированием и минимальным временем первого полупериода колебаний (рис. 2.б);
в) процесс с минимальной квадратичной
площадью отклонения, т.е.
![]() (рис. 2.в).
(рис. 2.в).
Граничный апериодический процесс характеризуется минимальным общим временем регулирования tр, отсутствием перерегулирования х2и минимальным регулирующим воздействием.
Процесс с 20%-ным перерегулированием является промежуточным и используется, когда некоторое перерегулирование допустимо. При этом уменьшается максимальное динамическое отклонение х1.
Процесс с минимальной квадратичной площадью отклонения отличается наибольшими регулирующим воздействием и временем регулирования и перерегулированием порядка 40…50%. Однако он характеризуется наименьшей величиной максимального динамического отклонения х1.
Один их этих типовых процессов почти всегда может удовлетворить технологическим требованиям различных агрегатов, т.е. будет оптимальным.
1.4. Оптимальные настройки регулятора
Рекомендуемые ниже настройки П-регулятора позволяют получить три указанных выше типовых процесса регулирования. П‑регулятор имеет закон регулирования вида y(t) = kpε(t), гдеkр– коэффициент передачи регулятора, измеряемый в следующих единицах:
![]()
Имеется много методов вычисления настроек регулятора. Копеловичем [ 3 ] на основании результатов исследования регуляторов на моделях предложенозначение оптимальной настройкиkр находить по графику рис. 3, построенному в функции отношения времени запаздыванияоб к постоянной времени объекта регулирования Тоб. Последние, в свою очередь, в результате элементарных построений определяются из кривой разгона объекта (рис. 1.а). Время запаздыванияобнаходится как отрезок на временной оси, отсекаемый касательной, проведённой к кривой разгона на её начальном участке в точке перегиба.
Довольно простыми экспериментальными правилами настройки, приводящими к удовлетворительным результатам, являются правила, сформулированные Циглером и Никольсом [ 2 ]в предположении, что степень затухания составляет 0,7…0,9. По этим правилам увеличивают коэффициентkp регулятора настолько, чтобы система стала совершать незатухающие колебания и, следовательно, находилась бы на границе устойчивости. Это значениеkp обозначают черезkpн. Оптимальная настройка П‑регулятора соответствуетkp = 0,5 kpн.

1.5. Определение уставок п-регулятора
Градуировку уставок регулятора производят путём определе-ния кривых разгона регулятора при различных положениях органов настройки. САУ при этом должна быть разомкнута, а регулятор сбалансирован в центре опыта, т.е. при типичном заданном значении регулируемой величины.
При одном определённом положении органов настройки на вход регулятора подают однократное скачкообразное возмущение – изменение регулируемой величины или заданного значения, тем самым изменяя величину отклонения регулируемой величины хп от задания хз При этом регистрируют изменение выходной величины y(t), т.е. положение регулирующего органа (или исполнительного механизма) по соответствующему указателю положения.
Величину возмущающего воздействия выбирают так, чтобы при каждом положении органов настройки выходную величину можно было измерить достаточно точно. Измеряют величину вводимого изменения входной величиных (она же ε) в единицах измерения регулируемой величины и соответствующее этому перемещение исполнительного механизмаy (рис. 4). Коэффициент передачи регулятора находят из формулыy = kpx,откуда получают:
![]()
Н
 а
первый взгляд П-регу-лятор имеет только
один пара-метр настройки –kp.В реальном регуляторе, если коэффициент
усиления усилителя не бесконечен и
применён интегрирующий исполнительный
механизм, кривая разгона регулятора на
участке, обведённом на рис. 4 окружностью,
может изменяться под вли-янием других
параметров (рис. 5).
а
первый взгляд П-регу-лятор имеет только
один пара-метр настройки –kp.В реальном регуляторе, если коэффициент
усиления усилителя не бесконечен и
применён интегрирующий исполнительный
механизм, кривая разгона регулятора на
участке, обведённом на рис. 4 окружностью,
может изменяться под вли-янием других
параметров (рис. 5).
Изменение скорости исполнительного механизма меняет постоянную времени экспоненты на начальном участке, но не влияет на коэффициент передачи kр (рис. 5.а).
Изменение глубины обратной связи изменяет постоянную времени и kр, неизменным остаётся угол наклона касательной, проведённой к обеим экспонентам в начале координат (рис. 5.б).
Изменение коэффициента усиления измерительного элемента меняет kр, сохраняя постоянную времени (рис. 5.в).