

АСУТП / лабораторные_0805
.pdfВ системах промышленного типа в чистом виде П-регулятор используется редко, так как обеспечивает быстрое, но не точное регулирование.
2.3 Пропорционально-интегральные регуляторы (ПИ-регуляторы)
Иногда ПИ-регуляторы называются изодромными регуляторами с гибкой обратной связью. Гибкая ОС действует только в период переходного режима. Эти регуляторы сочетают свойства И- и П-регулятора и технически представляют собой параллельное соединение И- и П- регулятора.
Зависимость между входной и выходной величинами ПИрегулятора определяется выражением:
τ |
|
|
1 |
τ |
|
|
u = KР e + KИ ∫e(τ )dτ |
или u = K |
|
|
|
|
(22) |
Р e + |
TИЗ |
∫e(τ )dτ |
||||
0 |
|
|
0 |
|
|
|
где Т |
|
= |
КР |
= |
u |
e |
|
= τ |
ИЗ |
|
|
τ |
|
||||
|
|
К |
u |
e |
||||
|
|
|
И |
|
|
|
|
|
ТИ – время изодрома – время, за которое угол поворота ИМ под действием пропорциональной части удваивается интегральной. Время изодрома ТИЗ численно характеризует среднюю скорость ИМ под действием интегральной части регулятора.
Благодаря наличию гибкой ОС ПИ-регулятор работает быстрее интегрального и точнее пропорционального регулятора.
2.4. Пропорционально-интегральные регуляторы с предварением (ПИД-регуляторы)
Наиболее эффективно используются на технологических объектах, подверженных воздействию длительных монотонных возмущений ПИД-регуляторы. Реализуя ПИД-закон управления, при формировании управляющего сигнала, регулятор учитывает не только величину, но и скорость изменения отклонения. Зависимость между входной и выходной величинами ПИД-ргулятора имеет вид:
|
|
|
|
|
|
τ |
|
de(τ ) |
|
|
||
u(τ ) = KР e(τ ) + KИ ∫e(τ )dτ + КП |
|
или |
||||||||||
|
dτ |
|||||||||||
|
|
|
|
|
|
0 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
1 |
τ |
|
|
|
|
|||
|
|
|
|
|
|
|
||||||
|
|
|
|
∫e(τ )dτ + TП |
|
de(τ ) |
||||||
u(τ ) = K |
Р e(τ ) + |
|
|
|
|
, |
||||||
|
|
dτ |
|
|||||||||
|
|
|
|
TИЗ 0 |
|
|
|
|||||
|
|
|
|
КП |
|
|
|
|
|
(23) |
||
где |
Т |
|
= |
|
|
|
|
|
|
|
||
П |
КР |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||
ТП – время предварения, параметр настройки дифференциальной части регулятора. Физически ТП – время, в течение которого угол поворота вала ИМ, под действием дифференцирующей части, удваивается пропорциональной.
Данный регулятор имеет три параметра динамической настройки: КР, ТИЗ, ТП. Наличие дифференциальной части в ПИД-регуляторе позволяет повысить качество регулирования. В данном случае регулятор работает с опережением (предварением), обеспечивая дополнительное перемещение РО на величину, компенсирующую скорость изменения отклонения параметра от задания.
Для формирования воздействия по производной от изменения регулируемого параметра необходимо наличие на входе регулятора дифференцирующего блока.
3. Определение динамических параметров настройки регулятора по динамическим параметрам объекта
Эффективность работы систем автоматического регулирования в конечном итоге определяется качеством переходного процесса в системе, которое зависит от принятого критерия оценки качества параметров переходного процесса.
После выбора критерия оценки качества требуемого переходного процесса необходимо определить для конкретных значений динамических параметров ОУ значения параметров динамической настройки выбранного закона регулирования.
Инерционные свойства τЗ и ТО управляемого технологического объекта препятствуют идеальной реализации поставленной задачи. В реальных производственных условиях перед каждым инженером возникает задача оптимизации контура управления, которая заключается в том, что для каждого объекта с известными динамическими пара-
21 |
22 |
метрами τЗ, ТО, КОБ необходимо определить значения параметров динамической настройки КР, ТИЗ, ТП регулятора, при которых максимально возможно компенсируется влияние инерционных свойств объекта.
Для практических инженерных целей широкое распространение получили различные приближенные методы определения динамических параметров настройки. Эти методы не требуют графических построений, использования номограмм и построения траекторий переходных процессов.
В зависимости от технологических требований к характеру действующих на объект возмущений наилучшим, как рекомендует традиционный метод, может быть признан один типовых процессов регулирования:
1 – апериодический монотонный процесс с минимальным временем регулирования τР min;
2 – апериодический процесс с 20% перерегулированием;
3 – процесс с минимальным значением квадратичного критерия
∞
J′ = ∫x2dτ → min
0
4 – процесс с настройкой на модальный оптимум (оптимум по модулю или метод ОМ) и т.п.
Например, сущность метода модального оптимума заключается
втом, чтобы модуль передаточной функции замкнутой системы WЗ(р)
вкак можно большей полосе частот (от ω = 0 до ∞) был максимально приближен к единице. Оптимизация состоит в "пригонке" модуля WЗ(р) к единице для возможно большей полосы частот.
Метод ОМ обеспечивает определение оптимальных значений динамических параметров настройки в соответствии с условиями:
КР = |
|
Т1 |
|
|
; ТИ = Т1; ТП = Т2 |
(24) |
2К |
ОБ |
τ |
|
|||
|
|
|
З |
|
||
где Т1 – большая постоянная времени; Т2 – меньшая (но соизмеримая с Т1) постоянная времени ОУ, τЗ – время запаздывания.
Применение инженерных методов не требует дополнительного исследования контура управления на устойчивость и обеспечивает получение стандартных переходных процессов в системе.
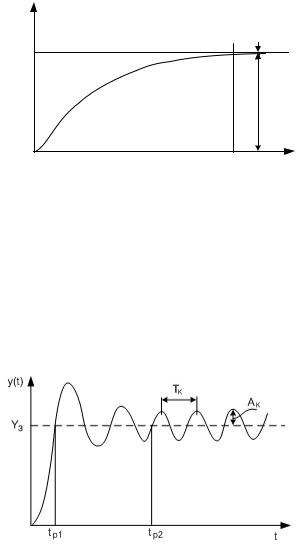
Апериодический монотонный процесс. В этом случае величина перерегулирования равна нулю, а время достижения выходной величины задания равно времени регулирования:
Рис.9 Апериодический переходный процесс по заданию
Периодический процесс с затухающими колебаниями (рис.12). Это самый распространенный вид процессов большинства промышленных САУ. В этом случае сохраняется достаточно высокое быстродействие системы, при наличии нескольких колебаний.
Периодический (колебательный) процесс с незатухающими колебаниями, рис.10. Такой процесс характерен для САУ с позиционными регуляторами. Либо неудачно подобраны настройки типового регулятора и система находится вблизи границы устойчивости.
Рис.10 График процесса с незатухающими колебаниями
Для процессов с установившимися колебаниями дополнительно определяют период ТК и амплитуду АК установившихся колебаний.
23 |
24 |

4. Показатели качества работы САР
В наши дни наибольшее распространение получили одноконтурные стабилизирующие системы регулирования. Структурная схема такой системы представлена на рис.11:
Рис.11 Структурная схема САУ
На систему воздействуют два вида возмущающих воздействий:
-задающее воздействие ХЗ;
-внутреннее f и внешнее F возмущающие воздействия.
Всвязи с этим система управления должна удовлетворять следующим требованиям:
-с максимальной точностью и быстродействием отрабатывать сигнал
задания: ХД(τ) = ХЗ(τ);
- по возможности быстро реагировать на возмущения f(τ) и F(τ), то есть ошибка ε(τ) = ХЗ – ХД под действием возмущений должна быть минимальной.
Качество работы САУ является одной из важнейших её характеристик. Для оценки уровня качества работы системы, в ТАУ введены количественные оценки качества.
Получить общую оценку качества в виде функциональной зависимости от множества структурных, технических и эксплуатационных характеристик системы достаточно сложно. Поэтому о качестве САУ судят в первую очередь по устойчивости статической и динамической точности.
Устойчивость САУ, то есть затухание переходных процессов в системе, является необходимым, но не достаточным условием практической пригодности этой системы.
Существенное значение для реальных промышленных условий имеет и сам характер протекания переходного процесса Y(τ) при регулировании; прежде всего его продолжительность и колебательность.
По траектории переходных процессов в системе можно определить прямые показатели качества её работы: τР1, τР2, е, σ, Ψ (см. рис.12).
Время первого достижения регулируемой величиной заданного значения τР1 оценивает быстроту регулирования системы относительно задающего воздействия и определяется как интервал времени от начала переходного процесса до момента, когда регулируемая величина впервые достигнет заданного значения YЗ.
Время переходного процесса или полное время регулирования τР2 характеризует быстродействие системы. Определяется τР2 как интервал времени от начала переходного процесса до момента, когда отклонение управляемой величины от ее нового установившегося значения становится меньше или равной допустимой ошибке регулирования YЗ – Y(τ) ≤ ε*. Величину ε* обычно принимают равной
±2-5% от диапазона возможного изменения Y.
Статическая ошибка регулирования е = XЗ – Y(τ) это отклонение регулируемой величины от заданного значения по окончании переходного процесса.
Динамическая ошибка регулирования – величина наибольшего отклонения регулируемого параметра от задания. Этот параметр также называют перерегулированием σ это максимальное отклонение в переходный период Ymax от установившегося значения, выраженное в процентах от YЗ:
σ = |
Ymax − YЗ |
100% или σ = |
Y1 |
100% |
(25) |
|
|
||||
|
YЗ − YН |
YЗ − YН |
|
||
Колебательность переходного процесса обычно оценивается периодом ТК и числом колебаний, равным числу минимумов траектории переходного процесса в интервале времени [0;τР2], а также степенью затухания.
Степень затухания колебаний Ψ определяется как отношение разности двух соседних положительных амплитуд колебаний к первой из них:
ψ = Y1 − Y3 =1− Y3 |
(26) |
Y1 Y1
Степень затухания колебаний в пределах 0.78-0.98 считается вполне удовлетворительной.
25 |
26 |
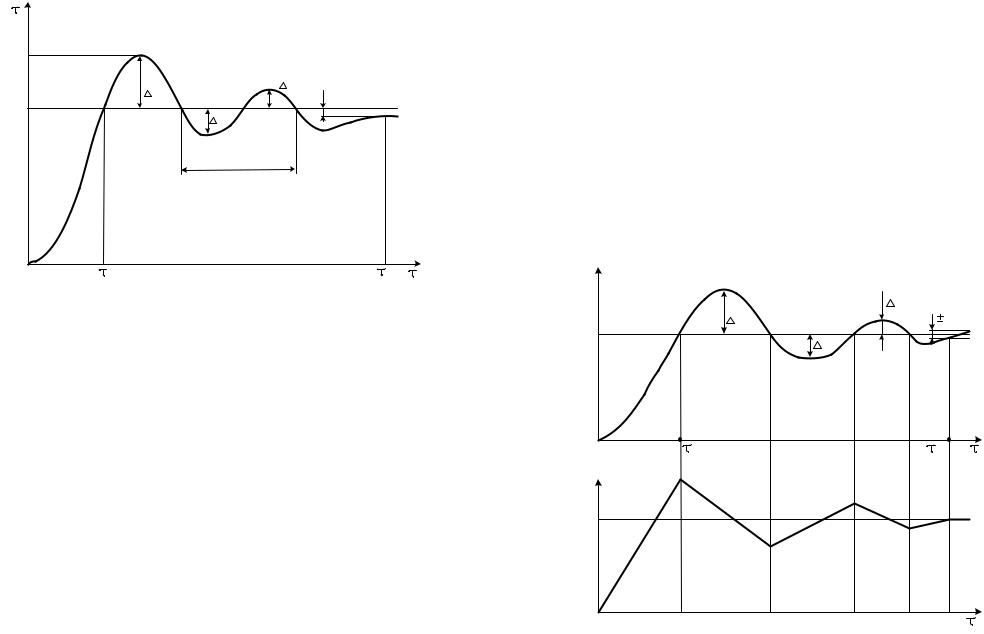
Рис.12. Прямые показатели качества переходного процесса |
5. Порядок выполнения работы
51 Включить стенд.
5.2С помощью блока ручного управления установить автоматический режим управления.
5.3Установить заданное значение регулируемого параметра на одной трети рабочего интервала статической характеристики с помощью задатчика и дождаться окончания переходного процесса. Зафиксировать в журнале значение начальные значения YН регулируемого параметра по шкале вторичного прибора и положение вала ИМ ХН по указателю положения вала.
5.4Быстро изменить задатчиком на 15-20% значение заданного параметра до YЗ.
5.5С момента изменения задания фиксировать по шкале вто-
ричного прибора изменение во времени выходного параметра Y(τ) и положение вала ИМ X(τ) через каждые 5 или 10 с, занося данные в журнал наблюдений. Измерения проводить до окончания переходного процесса или установления колебаний постоянной амплитуды.
27
Таблица 3
|
Экспериментальные данные |
|
Время, с |
Х, %хода |
Y, единицы регулируемой величины |
0 |
|
.. |
5 |
|
.. |
10 |
|
|
.. |
|
.. |
5.6Используя полученные значения, построить графики траекторий Y(τ) и X(τ). Примерный вид переходных процессов показан на рис.13.
5.7По построенным графикам определить количественные
оценки качества системы: τР1, τР2, е, σ, Ψ.
5.8 Сделать вывод о качестве управления и эффективности работы САУ.
Рис.13 Примерный вид графиков переходных процессов |
28
6. Вопросы для самопроверки
6.1Как оценивается качество работы САУ?
6.2Изобразите структурную схему замкнутой САУ.
6.3Какие прямые показатели качества используют для оценки работы САУ?
6.4Какие показатели применяют для оценки качества колебательных процессов?
6.5Перечислите преимущества ПИ-законы регулирования и напишите формулу ПИ-закона.
6.6В каких случаях целесообразно применять ПИД-регулятор и
почему?
6.7Перечислите инженерные методы определения оптимальных параметров настройки типовых регуляторов.
6.8Почему Д-закон не используют для управления в системах стабилизации?
6.9Как называются и рассчитываются параметры настройки ПИрегулятора?
6.10Перечислите основные виды переходных процессов в САУ, дайте краткую характеристику.
№ |
|
|
|
|
|
|
|
|
|
№ варианта |
|
|
|
вопросов |
|
|
|
|
|
|
1 и 6 |
1 |
6 |
11 |
16 |
21 |
26 |
2 и 7 |
2 |
7 |
12 |
17 |
22 |
27 |
3 и 8 |
3 |
8 |
13 |
18 |
23 |
28 |
4 и 9 |
4 |
9 |
14 |
19 |
24 |
29 |
5 и 10 |
5 |
10 |
15 |
20 |
25 |
30 |
29