

АСУТП / лабораторные_0805
.pdfВВЕДЕНИЕ
Данное методическое указание рассчитано на фронтальное проведение лабораторного практикума, когда все бригады (по 2-3 человека) на которые разделена учебная группа выполняют лабораторную работу по вариантам, используя программу имитационного моделирования САУ, которая имитирует работу реальной промышленной системы автоматического управлении (САУ) технологическими параметрами.
Результаты выполнения лабораторной работы заносятся студентом в лабораторный журнал в последовательности, соответствующей порядку выполнения работы. За оставшиеся 30-40 минут студент должен оформить отчет о проведении лабораторной работы и «защитить» полученные результаты путем квалифицированного объяснения хода выполнения работы. Проверить качество усвоенного материала можно с помощью контрольных вопросов, которые даны в конце каждой лабораторной работы.
Предварительную подготовку к выполнению лабораторных работ и подготовку лабораторного журнала каждый студент должен выполнить самостоятельно до выполнения работы.
ЛАБОРАТОРНАЯ РАБОТА №1
ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ СТАТИЧЕСКОЙ ХАРАКТЕРИСТИКИ ОБЪЕКТА УПРАВЛЕНИЯ
Цель работы: экспериментальное исследование статической характеристики объекта управления, определение её параметров и определение уравнения линии регрессии.
1. Общие сведения о статических характеристиках объектов управления
Автоматизация процессов металлургического производства осуществляется с помощью разнообразных технических средств, объединенных в системы управления.
Основным элементом системы является объект, в котором протекает управляемый процесс. Объектами управления (ОУ) могут быть как отдельные параметры, так и весь технологический процесс: металлургические агрегаты или цехи, отдельные предприятия или целые отрасли промышленности.
Создание условий, обеспечивающих требуемое направление протекания процесса, на основании анализа поступающей с объекта информации, называется управлением.
Процесс управления состоит из следующих этапов:
-получение информации о задачах и целях управления;
-получение информации о текущем состоянии и поведении ОУ в переходном режиме;
-проведение анализа полученной информации, принятие решения на управление;
-реализация принятого решения, контроль прохождения управляющего воздействия на объект и анализ качества управления.
Для обеспечения эффективного управления очень важно иметь информацию о характерных особенностях ОУ, которую получают при помощи анализа статических и динамических характеристик объекта.
Зависимость выходной величины Y (регулируемой величины) от входной величины X (регулирующей величины или воздействия) в установившемся режиме называется статической характеристикой объекта.
Установившимся режимом называется такое состояние ОУ или системы, при котором все переходные процессы закончены.
1 |
2 |
В качестве входной величины X обычно используется положение регулирующего органа или процент хода перемещения вала исполнительного механизма (ИМ) в процентах. Статическая характеристика позволяет определить границы управляемости объекта, т.е. в каких пределах Ymin – Ymax может изменяться регулируемый параметр при изменении положения вала ИМ от Xmin до Xmax, где минимальное и максимальное значения входного параметра ограниченны концевыми выключателями ИМ.
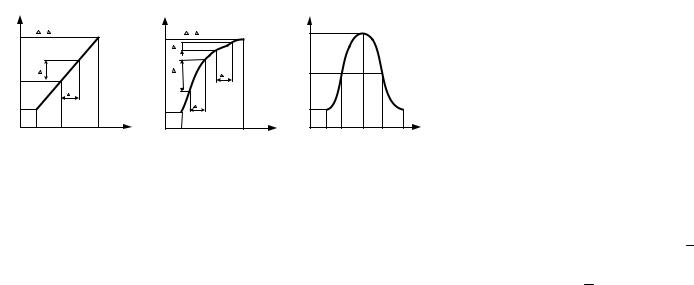
Статические характеристики могут быть линейными (рис.1,а) и нелинейными (рис.1,б). Нелинейные характеристики весьма разнообразны и на практике встречаются гораздо чаще линейных. Существуют объекты с экстремальными статическими характеристиками (рис.1,в).
Рис.1. Статические характеристики
По статической характеристике можно определить один из важнейших параметров объекта управления коэффициент передачи КОБ:
K = |
Y |
(1) |
ОБ |
X |
|
Коэффициент передачи КОБ равен отношению приращения выходной величины Y к приращению входной X в установившемся режиме.
Объект считается линейным, если коэффициент передачи КОБ является постоянной величиной на всем диапазоне изменения входной величины. Линейную зависимость можно выразить следующим уравнением:
Y = Y0 + KОБ X или Y = KОБ X |
(2) |
где Y0 – значение параметра Y при начальном значении X0. Линейными объектами управлять значительно проще, так как
легко прогнозировать выходное значение Y при изменении входного X. Объект считается нелинейным, если коэффициент передачи является переменной величиной, зависящей от входного параметра
КОБ= f(X).
Экстремальные статические характеристики можно отнести к существенно нелинейным характеристикам, коэффициент передачи которых меняет знак при переходе статической характеристики через минимум или максимум. Одному значению Yi соответствует два значе-
ния Xi1 и Xi2.
Для математического описания статических свойств ОУ используются данные, полученные экспериментально или расчетным путем. В производственных условиях статическая характеристика ОУ представляет собой экспериментальную статистическую зависимость между двумя параметрами X и Y. Для математического описания статических характеристик используются выражения, определяющие функциональную связь в виде Y = f(X). Здесь X – входной параметр объекта (обычно угол поворота вала ИМ, в % хода), Y – значение выходного параметра объекта (обычно регулируемый параметр).
Функциональная зависимость Y = f(X), определяющая статистическую связь между X и Y, называется теоретической линией регрессии. Процедура определения вида уравнения линии регрессии называется регрессионным анализом.
Запас функций, которыми можно математически выразить линию регрессии разнообразен, но обычно предпочтение отдается многочленам целых положительных степеней:
Y (X )= a + b X + c X 2 +K+ q X n ,
гдеY (X ) – ордината теоретической линии регрессии; а, b q – коэф-
фициенты, n – порядок многочлена.
При использовании статистических зависимостей необходимо помнить следующее: как бы точно тот или иной многочлен не воспроизводил искомую зависимость в заданном интервале изменения аргумента, это не дает основания полагать, что вне этого интервала данный многочлен будет соответствовать действительному ходу изменения функции.
Линия регрессии решает вопрос интерполяции, т.е. нахождения значений функции внутри некоторого интервала значений аргумента и
3 |
4 |
не оценивает течение процесса вне рассматриваемого интервала, т.е. не решает задачу экстраполяции.
Для определения уравнения теоретической линии регрессии необходимо, чтобы искомая линия подходила к экспериментальным точкам как можно ближе. Для расчета теоретической линии регрессии наиболее часто применяется метод наименьших квадратов, суть которого состоит в следующем: если близость каждой экспериментальной точки линии регрессии измеряется отрезком ординаты:
Yi = Yi −Y (Xi ),
где Yi – экспериментальное (измеренное) значение выходной величины при входном значении Xi; Y (Xi ) – ордината линии регрессии при
Х=Хi.
Обычно требуется, чтобы для всего интервала изменения аргумента выполнялось условие:
∑n (Yi −Y |
(Xi ))2 → min, |
(3) |
i=1 |
|
|
где n – число экспериментальных пар Yi – Xi.
По полученному уравнению статической характеристики легко рассчитать уравнение, описывающее изменение коэффициента передачи объекта. Для этого необходимо взять производную уравнения линии регрессии по Х:
|
|
|
(X ) |
|
К = |
dY |
(4) |
||
ОБ |
dX |
|
2. Порядок выполнения работы
2.1Подготовить рабочий журнал наблюдений в соответствии с таблицей 1.
2.2Включить стенд (должна загореться лампа «работа включе-
на».
2.3С помощью универсального переключателя (УП) установить ручной режим управления.
2.4С помощью другого УП и кнопок больше «>» и меньше «<» установить значение входного параметра Х (по дистанционному ука-
зателю положения ДУП вала исполнительного механизма ИМ) на отметку 0% хода ИМ. Дождаться установившегося режима, т.е. достижения выходной величиной У установившегося значения (в зависимости от характеристик объекта время установления показаний колеблется от 3 до 10 минут).
2.5Зафиксировать в журнале наблюдений значение X и Y.
2.6При помощи кнопок «>» и «<» установить положение вала ИМ на 10% хода; дождаться перехода Y в новое установившееся значение по шкале вторичного прибора и занести данные в журнал наблюдений.
Таблица 1
Экспериментальные данные
X, |
Y, единицы |
Y, единицы регу- |
K |
|
= |
Y |
, |
|
регулируемой |
лируемой величины, |
ОБ |
X |
|||||
% хода ИМ |
|
|
|
|||||
|
|
|
|
|||||
|
величины |
формула (5) |
формула (1) |
|||||
|
|
|
||||||
0 |
.. |
––– |
|
|
––– |
|
||
10 |
.. |
.. |
|
|
|
|
|
|
.. |
.. |
.. |
|
|
|
|
|
|
.. |
.. |
.. |
|
|
|
|
|
|
100 |
.. |
.. |
|
|
|
|
|
|
2.7 Повторить пункт 2.7 для 20, 30,..., 100% угла поворота вала
ИМ.
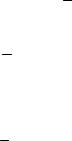
2.8На основе полученных данных построить график статической характеристики ОУ: ось абсцисс % хода вала ИМ, ось ординат единицы регулируемого параметра. Примерный график статической характеристики приведен на рис.2.
2.9Определить величину приращения выходного (регулируемо-
го) параметра Yi и занести в журнал наблюдений.
Yi = Y(Xi )−Y(Xi−1) |
(5) |
2.10Для каждого опыта определить величины значений коэффициентов передачи объекта по формуле (1) и занести в журнал полученные результаты.
2.11Построить график зависимости КОБ = f(Х) следующим обра-
зом:
- на оси X нанести отрезки, равные X;
5 |
6 |
- из середины каждого отрезка провести линии параллельно оси Y и отложить на них значения КОБ, для каждого отрезка X;
- соединить полученные точки плавной линией, что и будет графиком функции КОБ = f(Х), см. рис.3.
Рис.2. Статическая характеристика объекта управления
Рис.3. График зависимости КОБ = f(Х)
2.12 Рассчитать усредненное значение коэффициента передачи на линейном участке характеристики:
|
m |
|
|
ˆ |
= ∑КОБi |
m |
(6) |
КОБ |
|||
|
i=1 |
|
|
2.13 Сделать выводы о типе полученной статической характеристике ОУ, границах управляемости объекта и значении коэффициента передачи.
3. Вопросы для самоконтроля
3.1Что такое статическая характеристика ОУ?
3.2Какие виды статических характеристик объектов вы знаете?
3.2Что такое линии регрессии?
3.3В чем заключается суть метода наименьших квадратов?
3.4Что такое коэффициент передачи объекта? Есть ли у этого параметра размерность?
3.5В чем заключается отличие линейных объектов от нелиней-
ных?
3.6Как определить коэффициент передачи объекта, если известно уравнение линии регрессии его статической характеристики, например Y(X)=250+0.5X?
3.7Изобразите примерный вид графика зависимости КОБ=f(Х) для объекта, изображенного на рис.1,в.
3.8Рассчитайте на сколько изменится выходная величина объекта, если КОБ=3, а входное воздействие увеличится на 5%.
3.9Рассчитайте на сколько необходимо изменить входное воздействие, чтобы выходная величина достигла 450 0С, если известно,
что КОБ=5 0С/%, а Y(X=0)=300 0С.
3.10 Как определить наступление установившегося режима в объекте?
7 |
8 |
ЛАБОРАТОРНАЯ РАБОТА №2
ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ КРИВОЙ РАЗГОНА И ОЦЕНКА ДИНАМИЧЕСКИХ СВОЙСТВ ОБЪЕКТА УПРАВЛЕНИЯ
Цель работы: экспериментальное исследование кривой разгона объекта и определение динамических параметров объекта, построение кривой разгона методом Эйлера
1. Общие сведения о динамических характеристиках
Состояние и поведение объекта управления в неустановившихся переходных режимах определяются их динамическими свойствами. Динамические свойства ОУ могут быть определены линейными дифференциальными уравнениями, выражающими функциональную связь между входными и выходными величинами во времени.
Исходными данными для составления дифференциальных уравнений являются математические выражения физических законов, определяющих неустановившийся процесс в ОУ или другом элементе системы.
Определение динамических характеристик объектов с помощью дифференциальных уравнений может быть выполнено только для сравнительно простых объектов.
В общем виде зависимость выходной величины от входной в неустановившемся режиме выражается линейным дифференциальным уравнением вида:
a |
|
dnYвых |
+ a |
|
dn−1Yвых |
+...+ a |
dYвых |
|
+ a |
|
= |
||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
n dτ т |
n−1 dτ т−1 |
1 dτ |
|
|
0 |
(7) |
||||||||||
|
|
|
dm Xвх |
|
|
|
dm−1Xвх |
|
|
|
|
|
|
|
|||
= b |
+b |
|
+...+b |
dXвх |
+b |
||||||||||||
|
|
|
|||||||||||||||
|
|
m dτ m |
m−1 dτ т−1 |
|
1 dτ |
|
|
|
0 |
||||||||
где a0 .. an, b0 .. bm – постоянные коэффициенты; n, n-1,.. и m, m-1,..,1 – порядок производных.
В теории автоматического управления для записи и решения дифференциальных уравнений используется операторный метод, который при нулевых начальных условиях позволяет значительно упростить запись и решение дифференциальных уравнений. Уравнение (7) в операторной форме будет иметь вид:
(a |
n |
pn + a |
n−1 |
pn−1 +...+ a p + a |
0 |
) Y |
(p)= |
||||||||
|
|
|
|
|
|
1 |
|
вых |
|
(8) |
|||||
|
(b |
|
|
|
|
|
pm−1 |
|
|
|
) X |
|
|||
= |
m |
pm + b |
m−1 |
+...+ b p + b |
вх |
(p), |
|||||||||
|
|
|
|
|
|
1 |
|
0 |
|
|
|
||||
где YВЫХ(p), XВХ(p) – изображение по Лапласу выходного и входного параметров.
Операторная форма записи уравнения (7) позволяет получить очень важную динамическую характеристику ОУ – передаточную функцию W(p). Выражение, стоящее в скобках перед YВЫХ(p), называется собственным оператором. Выражение, стоящее в скобках перед XВХ(p), называется оператором воздействия.
Передаточной функцией объекта называется отношение оператора воздействия к собственному оператору, или отношение выходной величины к входной величине в операторной форме:
W(p)= |
Y(p) |
|
b |
|
pm + b |
pm−1 +...+ b p + b |
|
||||
|
|
= |
m |
|
m−1 |
1 |
0 |
(9) |
|||
X (p) |
a |
n |
pn + a |
n−1 |
pn−1 +...+ a p + a |
0 |
|||||
|
|
|
|||||||||
|
|
|
|
|
|
1 |
|
||||
Передаточная функция объекта W(p) является записью дифференциального уравнения (7) в операторной форме и широко используется как основная динамическая характеристика объекта или другого элемента системы.
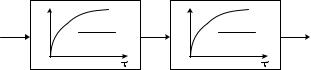
Наглядное представление о характере переходного процесса в объекте дает кривая разгона, которая представляет собой траекторию изменения выходного параметра во времени при однократном скачкообразном возмущении на входе.
По виду кривых разгона практически все объекты управления можно разделить на три вида:
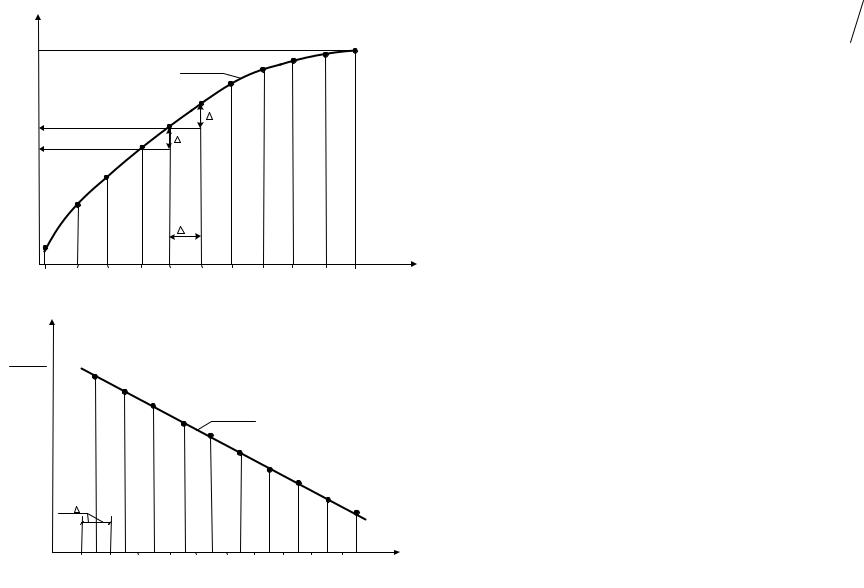
-объекты с самовыравниванием (рис.4,а);
-объекты без самовыравнивания (рис.4,б);
-объекты с запаздыванием с самовыравниванием или без самовыравнивания (рис.4,в).
9 |
10 |
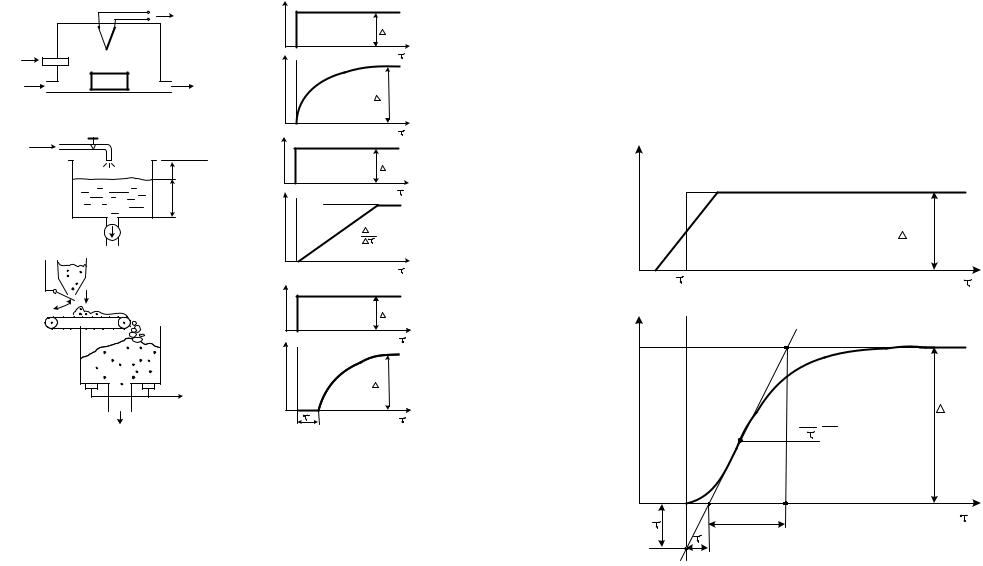
Рис.4. Объекты различного вида и траектории кривых разгона, соответствующих каждому типу объектов
Большинство объектов металлургического производства относится к первой группе. Изменение выходной величины после скачкообразного входного возмущающего воздействия происходит с постоянно уменьшающейся скоростью до момента достижения нового установившегося значения (рис.4,а).
Свойство объекта восстанавливать нарушенное равновесие называется самовыравниванием.
В объектах без самовыравнивания изменение выходной величины происходит с постоянной скоростью и беспредельно (до возникновения аварийных ситуаций) – рис.4,б.
В объектах с запаздыванием регулируемая величина начинает изменяться не одновременно с изменением входной величины, как в предыдущих случаях, а через некоторое время τЗ, называемое временем транспортного запаздывания. Для рис.4,в: τЗ = L/VL, где VL –
скорость движения на транспортном участке L.
Реальные кривые разгона (рис.5), полученные на промышленных объектах, отличаются от рассмотренных выше и имеют S-образный вид:
Рис.5. Реальная кривая разгона
Для количественной оценки динамических свойств объектов используются следующие параметры.
11 |
12 |
τЗ – время запаздывания – отрезок времени от начала возмущения τ = 0 до момента начала изменения выходной величины с постоянной максимальной скоростью или до момента пересечения касательной к Y=f(τ) в точке максимальной скорости [dY dτ ]max с осью
dτ ]max с осью
времени.
ТО – время разгона (постоянная времени) – время, в течение которого выходная величина переходит из одного установившегося состояния YУСТ1 в другое YУСТ2, при условии изменения этой величины
с постоянной максимальной скоростью [∂Y ∂τ ]max . Время разгона
∂τ ]max . Время разгона
характеризует инерционные свойства объекта.
КОБ – коэффициент передачи объекта – число единиц измерения выходной величины, приходящихся на единицу входной величины (см. формулу (1)).
Иногда, особенно для теплоэнергетических объектов, вместо постоянной времени ТО используют параметр ε – скорость разгона, а вместо коэффициента передачи КОБ используют коэффициент самовыравнивания – ρ:
|
|
|
ε = |
|
|
|
Yτ |
|
(10) |
||||
|
|
|
τ З X |
||||||||||
|
|
|
ρ = |
|
|
|
X |
(11) |
|||||
|
|
|
|
|
|
|
|
Y |
|
|
|||
где Х, Y, Yτ |
определены графически на рис.5. |
||||||||||||
Соотношения между ρ и КОБ следующее: |
|
|
|||||||||||
|
|
|
ρ = |
|
|
1 |
|
|
|
(12) |
|||
|
|
|
|
|
КОБ |
||||||||
|
|
|
|
|
|
|
|
|
|||||
Соотношение между ε и ТО можно вывести из подобия треуголь- |
|||||||||||||
ников KLN и |
PLO (см. рис.9): |
|
|
|
|
|
|
|
|
|
|||
|
|
τ З |
= |
Yτ |
|
|
|
Y = |
τ З Y |
|
|||
|
|
|
|
|
|
|
|
||||||
|
|
ТО |
|
Y |
|
|
|
τ |
TO |
||||
|
|
|
|
|
|
|
|
||||||
Подставив получившееся выражение в формулу (10), получим:
ε = |
Y |
= |
КОБ |
(13) |
|
X TО |
ТО |
||||
|
|
|
В теории автоматического управления вместо кривой разгона используется переходная функция, представляющая собой траекторию изменения выходной величины во времени, вызванную единичным входным ступенчатым воздействием Х = 1 при условии, что до момента приложения этого воздействия система находится в покое.
В большинстве случаев динамические свойства объектов с самовыравниванием можно представить последовательным соединением двух инерционных звеньев первого порядка с постоянными времени Т1 и Т2. Структурная схема такого соединения показана на рис.6:
Рис.6 Структурная схема представления динамических свойств ОУ с самовыравниванием
Передаточная функция последовательного соединения двух инерционных звеньев первого порядка имеет вид:
W(p)= |
|
1 |
(14) |
|
|||
(T p +1)(T p +1) |
|||
|
1 |
2 |
|
Для определения параметров Т1 и Т2 по экспериментальной кривой разгона в большинстве случаев можно воспользоваться методом Орманса. Последовательность шагов для определения значений Т1 и Т2 следующая.
а) Экспериментальная кривая разгона нормируется, т.е. весь диапазон от YУСТ1 до YУСТ2 (см. рис.5) принимается за единицу и по необходимости начало оси времени смещается вправо на величину транспортного запаздывания – от подачи возмущающего воздействия до начала изменения выходной величины.
б) Из нормированной кривой разгона определяется время, соответствующее значению Y7 = 0.7 и обозначается как τ7.
13 |
14 |
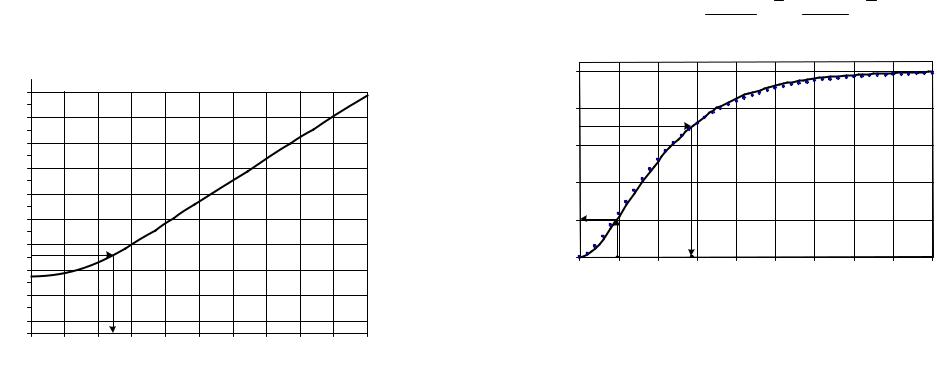
в) Полученый интервал делиться на три части, определяется точка τН = τ7/3. Из точки τН поднимается перпендикуляр до кривой разгона и определяется величина YН = Y(τН).
г) Постоянная времени объекта определяется с помощью вспомогательной величины Z*. Для нахождения которой используется номограмма, представленная на рис.7.
Рис.7 Номограмма для определения величины Z*
д) Величины Т1 и Т2 рассчитываются по формулам:
T = |
τ7 |
(1+ Z ) и |
T |
= |
τ7 |
(1− Z ) |
(15) |
|
|
||||||
1 |
2.4 |
|
2 |
2.4 |
|
|
|
Пример. На рис.8 показаны шаги по определению τ7 и τН по экспериментальной кривой разгона, изображенной точками. Получили значения: τ7 = 28 с, τН = 9,3 с и YН = 0,212. В соответствии с номограммой рис.11 определили Z* = 0.24. Сплошной линией показан результат расчета по модели полученной соединением двух инерционных звеньев первого порядка с найденными по методу Орманса постоянными времени Т1 = 14.5 и Т2 = 8,9 с.
Решение уравнения при ступенчатом входном сигнале будет |
||||||||
иметь вид: |
|
|
|
|
|
|
|
|
|
|
|
(τ )= 1+ |
Т1 |
− τ |
T2 |
− τ |
|
|
Y |
РАСЧ |
e T1 + |
e T2 |
(16) |
|||
|
|
Т2 |
−Т1 |
T1 − T2 |
|
|
||
|
|
|
|
|
||||
|
Рис.8. Построение кривой разгона методом Орманса |
|
||||||
|
экспериментальная; ––– |
расчетная кривая разгона |
|
|||||
В некоторых случаях, когда значение величины YН оказывается меньше 0.19, воспользоваться номограммой невозможно. Это свидетельствует о том, что объект не может быть с достаточной точностью описан последовательным соединением двух инерционных звеньев. В таком случае следует воспользоваться другими методами. Например, методом наименьших квадратов или, если это допустимо, увеличить время транспортного запаздывания и сместить начало оси времени правее. Если T1 >>T2, то можно перейти к модели первого порядка.
Для построения расчетной кривой разгона в единицах регулируемой величины можно воспользоваться следующим уравнением:
|
|
|
|
|
− |
τ |
|
|
|
|
− |
τ |
|
|
|
|
|
|
|
|
|
Т |
1 e |
|
T1 |
|
|
T2 |
e |
|
T2 |
|
|
|
|
|
|
Y |
|
(τ )= 1+ |
|
|
|
+ |
|
|
|
|
(Y |
− Y |
)+ Y |
(17) |
||||
|
Т2 − Т1 |
|
|
− T2 |
|
|||||||||||||
|
РАСЧ |
|
|
|
T1 |
|
|
УСТ 2 |
УСТ 1 |
УСТ 1 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15 |
16 |

2. Порядок выполнения работы
2.1 Подготовить рабочий журнал наблюдений с таблицей 2 следующего вида:
|
|
|
Таблица 2 |
|
|
|
Экспериментальные данные |
||
Время, с |
Х, %хода |
Y, единицы регулируемой величины |
|
|
0 |
ХН |
|
.. |
|
... |
|
|
.. |
|
|
|
|
|
|
.. |
ХК |
|
.. |
|
2.2 Включить стенд (должна загореться лампа «работа включе-
на».
2.3С помощью универсального переключателя (УП) установить ручной режим управления.
2.4С помощью другого УП и кнопок больше «>» и меньше «<» установить значение входного параметра Х (по дистанционному указателю положения вала исполнительного механизма ИМ) на отметку 40-50% хода ИМ. Дождаться достижения выходной величиной У установившегося значения (5-7 минут).
2.5Изменить положение вала ИМ на 15-20% хода (лучше увеличить). Зафиксировать в журнале время хода ИМ из начального
состояния ХН в конечное ХК и величину возмущения Х = ХК – ХН.
2.6С момента изменения положения вала ИМ фиксировать по шкале вторичного прибора изменение во времени выходного параметра через каждые 5-10 с, занося данные в журнал наблюдений.
2.7Используя полученные значения, построить график траектории кривой разгона объекта. Примерный вид кривой разгона показан на рис.9.
2.8Графическим методом определить динамические параметры
объекта: τЗ, ТО, КОБ, ρ, ε.
2.9Используя метод Орманса определить постоянные времени Т1 и Т2, представив объект в виде последовательного соединения двух инерционных звеньев первого порядка (см. рис.6).
2.10Построить расчетную кривую разгона по формуле (17) на одном графике вместе с экспериментальной кривой разгона. Сравнить результаты, сделать выводы.
3. Вопросы для самоконтроля
3.1Что такое передаточная функция объекта?
3.2Какой объект обладает свойством самовыравнивания?
3.3Какой объект не обладает свойством самовыравнивания?
3.4Что такое транспортное запаздывание? Приведите пример.
3.5Изобразите вид кривой разгона реального объекта управле-
ния.
3.6 Какие параметры объекта можно определить по кривой раз-
гона?
3.7В чем заключается метод Орманса? В каких случаях он при-
меним?
3.8Что такое переходная функция? Чем она отличается от кривой разгона?
3.9Опишите методику снятия экспериментальной кривой разго-
на.
3.10Чему равен коэффициент самовыравнивания для объектов без самовыравнивания? Ответ поясните формулой.
ЛАБОРАТОРНАЯ РАБОТА № 3
ИЗУЧЕНИЕ ТИПОВЫХ ЗАКОНОВ РЕГУЛИРОВАНИЯ И ОПРЕДЕЛЕНИЕ ПОКАЗАТЕЛЕЙ КАЧЕСТВА ПЕРЕХОДНЫХ ПРОЦЕССОВ В САУ
Цель работы: изучить типовые законы регулирования, изучить методики определения оптимальных параметров настройки регуляторов по динамическим параметрам объекта. Научиться определять показатели качества по переходным процессам в САУ.
1. Общие сведения
Применяемые в настоящее время в металлургическом производстве автоматические регуляторы, как правило, относятся к устройствам непрерывного действия. Это значит, что между входными и выходными параметрами регулятора существует непрерывная функциональная связь.
Входным параметром регулятора является сигнал рассогласования между заданным и действительным значением регулируемого параметра. Обычно сигнал рассогласования называют сигналом ошибки регулирования.
17 |
18 |

Выходной величиной регулирующего устройства являются командные импульсы, управляющие работой исполнительного механизма (ИМ), перемещающего регулирующий орган (РО). Поэтому наиболее удобно выходную величину регулятора оценивать в процентах хода вала ИМ.
Между входной и выходной величинами регулятора существует определенная функциональная связь во времени. Эта функциональная связь называется законом регулирования. Формирование закона регулирования в регуляторах разных конструкций осуществляется различными способами:
1)закон регулирования вырабатывается непосредственно в канале регулирования;
2)закон регулирования формируется с помощью введения различных обратных связей (ОС).
Качество работы регулятора при выбранном законе регулирования зависит от значений параметров динамической настройки регулятора, входящих в виде постоянных коэффициентов в уравнения
иопределяющие закон регулирования.
Схематическое решение каждого промышленного регулятора позволяет изменять значения этих коэффициентов в широких пределах.
Величины динамических параметров настройки регулятора должны соответствовать динамическим параметрам объекта. Правильный выбор коэффициентов настройки регулятора является главной задачей технологической наладки контура регулирования на реальном производственном объекте. Серийные регулирующие системы непрерывного действия в соответствии с используемыми в них законами регулирования можно разделить на четыре типа.
2. Типовые законы регулирования
2.1 Интегральные регуляторы (И-регуляторы)
Эти регуляторы реализуют интегральный И-закон регулирования и иногда называются астатическими. Зависимость между входной и выходной величинами И-регулятора имеет вид:
τ |
du(τ ) |
|
||
u(τ )= KИ ∫e(τ )dτ или |
= KИ e(τ ) |
|||
dτ |
|
|||
0 |
|
|||
|
|
|
||
(18)
где e(τ) – отклонение регулируемой величины от задания (ед. измерения регулируемого параметра); u(τ) – угол поворота вала ИМ или РО (% хода).
Отличительная особенность интегрального регулятора: скорость перемещения вала ИМ пропорциональна отклонению регулируемого параметра от задания.
Динамическим параметром настройки И-регулятора является коэффициент передачи КИ. Этот коэффициент численно равен величине скорости перемещения РО (вала ИМ), приходящейся на единицу отклонения регулируемого параметра от задания:
KИ |
= |
du dτ |
, |
|
%хода |
|
|
|
|
|
|
(19) |
|||
e(τ ) |
|
||||||
|
|
|
|
ед.изм.регулир.величины |
|
||
Наиболее полно интегральному типу регуляторов соответствуют гидравлические регуляторы со струйной трубкой.
2.2 Пропорциональные регуляторы (П-регуляторы)
П-регуляторы реализуют пропорциональный закон регулирования в соответствии с выражением:
u(τ ) = KР e(τ ) |
(20) |
Отличительной особенностью П-регулятора является пропорциональность угла поворота вала ИМ величине отклонения регулируемого параметра от задания.
Регулятор характеризуется наличием жесткой ОС по положению вала ИМ. Для реализации этой обратной связи в ИМ дополнительно встраивается датчик контроля положения выходного вала ИМ.
Пропорциональный регулятор имеет один параметр динамической настройки – коэффициент передачи КР. Последний численно равен углу поворота вала ИМ, приходящегося на единицу отклонения регулируемого параметра от задания:
KР |
= u , |
|
%хода |
|
|
|
|
|
(21) |
||||
|
||||||
|
e |
ед.изм.регулир.величины |
|
|||
19 |
20 |