

ТСА
.pdfСодержание |
|
СОДЕРЖАНИЕ.................................................................................................................. |
1 |
ВВЕДЕНИЕ......................................................................................................................... |
6 |
СТРУКТУРА АСУ ТП....................................................................................................... |
6 |
КЛАССИФИКАЦИЯ ТЕХНИЧЕСКИХ СРЕДСТВ РЕГУЛИРОВАНИЯ ................. |
7 |
ГОСУДАРСТВЕННАЯ СИСТЕМА ПРИБОРОВ В ТЕХНИЧЕСКИХ СРЕДСТВАХ |
|
АВТОМАТИЗАЦИИ.......................................................................................................... |
7 |
УНИФИЦИРОВАННЫЕ СИГНАЛЫ ГСП. .................................................................. |
8 |
СТРУКТУРА СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ................. |
9 |
ТРЕБОВАНИЯ К УНИВЕРСАЛЬНЫМ ТЕХНИЧЕСКИМ СРЕДСТВАМ |
|
АВТОМАТИЗАЦИИ........................................................................................................ |
10 |
СПОСОБЫ ВВОДА ВХОДНОГО СИГНАЛА В РЕГУЛЯТОР........................................................ |
10 |
Приборный способ ввода входного сигнала............................................................... |
10 |
Аппаратный способ ввода входного сигнала. ........................................................... |
11 |
Агрегатный способ ввода входного сигнала. ............................................................ |
11 |
ЗАКОНЫ РЕГУЛИРОВАНИЯ....................................................................................... |
13 |
СТАНДАРТНЫЕ НЕЛИНЕЙНЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ. ................................................. |
13 |
СТАНДАРТНЫЕ ЛИНЕЙНЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ....................................................... |
14 |
Пропорциональный закон регулирования. ................................................................. |
14 |
Интегральный закон регулирования.......................................................................... |
15 |
Пропорционально-интегральный закон регулирования. ........................................... |
15 |
Пропорционально-дифференциальный закон регулирования. .................................. |
16 |
Пропорционально-интегрально-диференциальный закон регулирования................ |
16 |
СВОЙСТВА ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ И ИХ УЧЕТ ПРИ |
|
ФОРМИРОВАНИИ ЗАКОНОВ РЕГУЛИРОВАНИЯ................................................. |
17 |
ПНЕВМАТИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ.......................................................... |
17 |
ГИДРАВЛИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ........................................................... |
17 |
ЭЛЕКТРИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ. ............................................................ |
17 |
ФОРМИРОВАНИЕ СТАНДАРТНЫХ ЗАКОНОВ РЕГУЛИРОВАНИЯ. ................ |
19 |
СПОСОБЫ ФОРМИРОВАНИЯ ПРОПОРЦИОНАЛЬНОГО ЗАКОНА. ............................................ |
19 |
1 способ формирования пропорционального закона................................................. |
19 |
2 способ формирования пропорционально-интегрального закона........................... |
20 |
СПОСОБЫ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО ЗАКОНА....................................................... |
20 |
1 способ формирования интегрального закона. ....................................................... |
20 |
2 способ формирования пропорционально-интегрального закона........................... |
20 |
ФОРМИРОВАНИЕ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНОГО ЗАКОНА...................................... |
20 |
1 способ формирования пропорционально-интегрального закона........................... |
20 |
2 способ формирования пропорционально-интегрального закона........................... |
21 |
3 способ формирования пропорционально-интегрального закона........................... |
21 |
4 способ формирования пропорционально-интегрального закона........................... |
21 |
1
СПОСОБЫ ФОРМИРОВАНИЯ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНОГО |
22 |
ЗАКОНА. ........................................................................................................................... |
|
1 способ формирования пропорционально-интегрально-дифференциального |
|
закона.......................................................................................................................... |
22 |
2 способ формирования пропорционально-интегрально-дифференциального |
|
закона.......................................................................................................................... |
22 |
3 способ формирования пропорционально-интегрально-дифференциального |
|
закона.......................................................................................................................... |
23 |
4 способ формирования пропорционально-интегрально-дифференциального |
|
закона.......................................................................................................................... |
23 |
5 способ формирования пропорционально-интегрально-дифференциального |
|
закона.......................................................................................................................... |
24 |
6 способ формирования пропорционально-интегрально-дифференциального |
|
закона.......................................................................................................................... |
24 |
ФОРМИРОВАНИЕ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНОГО ЗАКОНА |
|
РЕГУЛИРОВАНИЯ В РЕГУЛЯТОРАХ С ИСПОЛНИТЕЛЬНЫМ |
|
МЕХАНИЗМОМ ПОСТОЯННОЙ СКОРОСТИ. ........................................................ |
25 |
ЗАДАЧА ГРАДУИРОВКИ ОРГАНОВ НАСТРОЙКИ................................................ |
26 |
КОМПЛЕКС АППАРАТУРЫ РЕГУЛИРОВАНИЯ «КОНТУР» .............................. |
27 |
ПРИБОР РЕГУЛИРУЮЩИЙ Р25 МОДИФИКАЦИЙ Р25.1, Р25.2, Р25.3. ................................. |
27 |
ПРИБОР КОРРЕКТИРУЮЩИЙ К15 МОДИФИКАЦИЙ К15.1, К15.2, К15.3............................. |
28 |
ПРИБОР КОРРЕКТИРУЮЩИЙ К16 МОДИФИКАЦИЙ К16.1 И К16.3...................................... |
28 |
ПРИБОР КОРРЕКТИРУЮЩИЙ К26 МОДИФИКАЦИЙ К26.1 И К26.3...................................... |
28 |
ПРИБОР РЕГУЛИРУЮЩИЙ КОМПАКТНЫЙ РС29................................................................. |
28 |
ИЗМЕРИТЕЛЬНЫЙ СУББЛОК РЕГУЛЯТОРА Р25.1................................................................. |
29 |
ИЗМЕРИТЕЛЬНАЯ СХЕМА РЕГУЛЯТОРА Р25.2. ................................................................... |
29 |
ИЗМЕРИТЕЛЬНАЯ СХЕМА Р25.3. ....................................................................................... |
30 |
СХЕМА РЕГУЛИРУЮЩЕГО СУББЛОКА РЕГУЛЯТОРА Р25..................................................... |
30 |
ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА РЕГУЛЯТОРОВ СИСТЕМЫ «КОНТУР».............................. |
31 |
РЕАЛЬНЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ. .............................................................. |
31 |
СТРУКТУРНАЯ СХЕМА ПОЛУЧЕНИЯ ПРОПОРЦИОНАЛЬНОГО ЗАКОНА.................................. |
32 |
СТРУКТУРНАЯ СХЕМА ПОЛУЧЕНИЯ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНОГО ЗАКОНА. ......... |
32 |
СИСТЕМА «КОНТУР-2»................................................................................................ |
34 |
КОМПЛЕКС СРЕДСТВ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ «КАСКАД-
2»......................................................................................................................................... |
35 |
СВОЙСТВА ПЕРЕДАЧИ ИНФОРМАЦИИ С ПОМОЩЬЮ ТОКОВОГО |
|
СИГНАЛА......................................................................................................................... |
37 |
ИЗМЕРИТЕЛЬНЫЙ БЛОК И.04................................................................................... |
37 |
БЛОК А.04......................................................................................................................... |
38 |
РЕГУЛИРУЮЩИЙ БЛОК Р.21 .................................................................................... |
39 |
РЕГУЛИРУЮЩИЙ БЛОК Р.12 .................................................................................... |
40 |
2
БЛОК ДИНАМИЧЕСКИХ ПРЕОБРАЗОВАНИЙ Д.01 .............................................. |
42 |
БЛОКИ УПРАВЛЕНИЯ: БУ21 И БУ12........................................................................ |
42 |
РЕАЛЬНЫЕ РЕГУЛЯТОРЫ И ЗАКОНЫ РЕГУЛИРОВАНИЯ............................... |
43 |
ВЫСОКОТОЧНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ВРТ ....................................... |
45 |
ИЗМЕРИТЕЛЬНЫЙ БЛОК И102........................................................................................... |
45 |
ФОРМИРУЮЩИЙ БЛОК Р111............................................................................................. |
46 |
КОМПЛЕКС ТЕХНИЧЕСКИХ СРЕДСТВ ’’КАСКАД-2’’ ........................................ |
46 |
РЕГУЛИРУЮЩИЕ УФМ (УНИФИЦИРОВАННЫЕ МОДУЛИ) .................................................. |
47 |
РЕГУЛИРУЮЩИЕ МОДУЛИ................................................................................................ |
48 |
Р027................................................................................................................................. |
48 |
Р017................................................................................................................................. |
48 |
ИЗМЕРИТЕЛЬНЫЕ БЛОКИ .................................................................................................. |
49 |
И001................................................................................................................................ |
49 |
ИД001 ............................................................................................................................. |
49 |
ИС001 ............................................................................................................................. |
49 |
ИТ002.............................................................................................................................. |
49 |
МОДУЛИ СТАТИЧЕСКОГО ПРЕОБРАЗОВАНИЯ ИНФОРМАЦИИ.............................................. |
49 |
А001................................................................................................................................ |
49 |
А005................................................................................................................................ |
49 |
А035................................................................................................................................ |
50 |
Л003 ................................................................................................................................ |
50 |
Н005................................................................................................................................ |
50 |
Ф001................................................................................................................................ |
50 |
Ф003................................................................................................................................ |
51 |
МОДУЛИ ДИНАМИЧЕСКОГО ПРЕОБРАЗОВАНИЯ ИНФОРМАЦИИ. ......................................... |
51 |
Д005 ................................................................................................................................ |
51 |
Д006 ................................................................................................................................ |
51 |
Д007 ................................................................................................................................ |
51 |
РЕГУЛИРУЮЩИЙ БЛОК Р27 ..................................................................................... |
51 |
РЕАЛИЗАЦИЯ ТРЁХПОЗИЦИОННОГО ЗВЕНА С ЗОНОЙ ВОЗВРАТА ......................................... |
52 |
Р17 .................................................................................................................................. |
53 |
АГРЕГАТНЫЙ КОМПЛЕКС ЭЛЕКТРИЧЕСКИХ СРЕДСТВ РЕГУЛИРОВАНИЯ |
|
АКЭСР............................................................................................................................... |
54 |
УСТРОЙСТВА ВВОДА-ВЫВОДА ИНФОРМАЦИИ................................................................... |
55 |
(БКР)............................................................................................................................... |
55 |
БЛОКИ СТАТИЧЕСКОГО ПРЕОБРАЗОВАНИЯ ИНФОРМАЦИИ ................................................. |
56 |
БВО................................................................................................................................. |
56 |
БЛОК СИГНАЛИЗАЦИИ БСГ .............................................................................................. |
56 |
БЛОК НЕЛИНЕЙНЫХ ПРЕОБРАЗОВАНИЙ БНП .................................................................... |
57 |
БЛОК СЕЛЕКТИРОВАНИЯ БСЛ........................................................................................... |
57 |
БЛОКИ ДИНАМИЧЕСКОГО ПРЕОБРАЗОВАНИЯ ИНФОРМАЦИИ.............................................. |
58 |
РЕГУЛИРУЮЩИЕ БЛОКИ ................................................................................................... |
58 |
РБИ ................................................................................................................................. |
58 |
РБА (РЕГУЛИРУЮЩИЙ БЛОК АНАЛОГОВЫЙ)................................................... |
59 |
ФОРМИРОВАНИЕ ЗАКОНА РЕГУЛИРОВАНИЯ ...................................................................... |
63 |
3
БЛОК ПРЕЦИЗИОННОГО ИНТЕГРИРОВАНИЯ БПИ ............................................................... |
64 |
БЛОК ДИНАМИЧЕСКИХ ПРЕОБРАЗОВАНИЙ БДП ................................................................ |
65 |
РЕГУЛИРУЮЩИЙ БЛОК РБИ-1.......................................................................................... |
65 |
РБИМ (РЕГУЛИРУЮЩИЙ БЛОК ИМПУЛЬСНЫЙ МОДЕРНИЗИРОВАННЫЙ) |
|
............................................................................................................................................ |
67 |
АНАЛИЗ ДИНАМИЧЕСКОЙ СТРУКТУРЫ БЛОКА РБИМ........................................................ |
69 |
РАБОТА БЛОКА РБИМ С ДИСКРЕТНОЙ ДИСТАНЦИОННОЙ НАСТРОЙКОЙ ПАРАМЕТРОВ ...... |
71 |
РАБОТА БЛОКА РБИМ С АНАЛОГОВОЙ ДИСТАНЦИОННОЙ НАСТРОЙКОЙ ПАРАМЕТРОВ. .... |
72 |
ФОРМИРОВАНИЕ ЗАКОНОВ ПИ- И ПИД-РЕГУЛИРОВАНИЯ В РЕГУЛЯТОРЕ РБИМ .............. |
74 |
ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА ЭЛЕКТРИЧЕСКИХ СРЕДСТВ |
|
РЕГУЛИРОВАНИЯ......................................................................................................... |
75 |
Управление пусковым устройством.......................................................................... |
75 |
ТИРИСТОРНЫЙ ПУСКАТЕЛЬ БПР-2 ....................................................................... |
76 |
ТИРИСТОРНЫЙ ПУСКАТЕЛЬ У-101......................................................................... |
78 |
ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ ТИПА МЭО ПРОИЗВОДСТВА ЧЗЭИМ. 79 |
|
ПНЕВМАТИЧЕСКИЕ СРЕДСТВА РЕГУЛИРОВАНИЯ .......................................... |
81 |
ПНЕВМАТИЧЕСКОЕ ИЗОДРОМНОЕ РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО НА |
|
БАЗЕ КС3.......................................................................................................................... |
86 |
ПНЕВМАТИЧЕСКИЕ РЕГУЛЯТОРЫ СИСТЕМЫ «СТРАРТ» .............................. |
86 |
ПОЗИЦИОННЫЙ РЕГУЛЯТОР ПР1.5. .................................................................................. |
87 |
ПРОПОРЦИОНАЛЬНЫЙ РЕГУЛЯТОР ПР 2.5......................................................................... |
87 |
ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР ПР3.21. ............................................... |
89 |
ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР ПР3.25 ............... |
90 |
ГИДРАВЛИЧЕСКИЕ СРЕДСТВА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ. 91 |
|
ГИДРАВЛИЧЕСКИЕ СРЕДСТВА РЕГУЛИРОВАНИЯ ХАРЬКОВСКОГО ЗАВОДА |
|
«ТЕПЛОАВТОМАТ.».......................................................................................................... |
94 |
ПРИНЦИП ДЕЙСТВИЯ ГИДРАВЛИЧЕСКОГО РЕГУЛЯТОРА ИНТЕГРАЛЬНОГО ДЕЙСТВИЯ ......... |
94 |
ГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР П-ДЕЙСТВИЯ .................................................................... |
94 |
ГИДРАВЛИЧЕСКИЙ РЕГУЛЯТОР ПИ-ДЕЙСТВИЯ.................................................................. |
94 |
4
Рекомендуемая литература
1.Беляев Г.Н., Кузищин В.Ф., Смирнов Н.И. Технические средства автоматизации в теплоэнергетике.
2.Справочник по наладке автоматических устройств контроля и регулирования (вторая часть второго издания) Дубровный В.А.
3.Штейнберг Ш., Хвилевицкий Промышленные автоматические регуляторы.
4.Плетнев Г.П. Автоматическое регулирование и защита тепловых установок электростанций.
5.Каталоги ГСП издание ЦНИИТЭИ приборостроения (том 1 — том 5).
6.Каталог чертежей и схем по курсу технических средств автоматизации.
7.Клюев А.С. Наладка систем автоматического регулирования.
5

Введение
Технические средства АСУТП включают в себя все устройства, входящие в состав системы управления и предназначенные для получения информации, ее передачи, хранения и преобразования, а также для осуществления управляющих и регулирующих воздействий на технологический объект управления (ТОУ).
Главное внимание в данном курсе будет уделяться аналоговым средствам регулирования, в меньшей степени — дискретным.
Вразвитии технических средств автоматизации можно выделить 3 этапа:
1.начальный;
2.комплексной механизации, автоматизации ТОУ;
3.автоматизированные системы управления; Первому этапу характерно применение технических средств для автоматизации
управления отдельных функций объекта, регулирования (в основном, стабилизации) отдельных технологических величин. Большая часть управляющих воздействий осуществляется оператором с помощью устройств дистанционного управления.
Второй этап характерен тем, что функции автоматизации охватывают все технические устройства объекта. Усовершенствуются сами технические средства, переходят к блочно-модульному принципу конструирования.
Третий этап характеризуется внедрением АСУ в технологические процессы. АСУ ТП — автоматическая система, совершающая управление процессами и агрегатами на низшем уровне АСУ. Предполагает использование как аналоговых, так и современных цифровых комплексов, призванных управлять процессом в целом по заданию технолога.
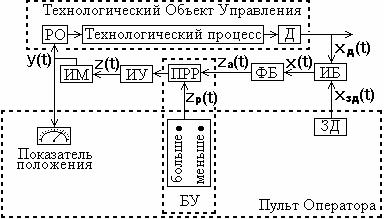
Структура АСУ ТП.
Д — датчик — часть объекта.
РО — регулирующий орган (клапан, вентиль, заслонка).
Рег. — автоматический регулятор — поддерживает на заданом уровне значение технологической величины.
ЗД — задатчик — вводит в автоматический регулятор значение регулируемой величины.
УВВИ — Устройство Ввода и Вывода Информации.
УВМ — Управляющая Вычислительная Машина. УВМ может работать в следующих режимах:
üРежим слежения — обработка поступившей информации, вывод информации на монитор.
üРежим советника — анализ ситуации, рекомендации по исправлению возникших ошибок.
6
ü Режим воздействия на объект — воздействие на регуляторы. Применяется тогда, когда процесс достаточно хорошо изучен, чтобы поручить его управление машине.
Классификация технических средств регулирования
1.По характеру формирования управляющего воздействия на регулирующий орган:
а) прямого действия; б) косвенного действия;
Регуляторы прямого действия вырабатывают управляющее воздействие за счет энергии, которой располагает измерительное устройство (пример: регулятор Уатта). Регуляторы косвенного действия используют для перемещения регулирующего органа источник дополнительной энергии (пример: изодромный регулятор). В схеме изодронного регулятора удается достигнуть регулирования без статической ошибки.
2.По роду используемой энергии: а) гидравлические; б) пневматические; в) электрические; г) смешанные.
3.По закону регулирования: а) П-закон; б) И-закон; в) ПИ-закон;
г) ПД-закон; д) ПИД-закон.
Самые распространенные — 2х- и 3х- позиционные законы регулирования, а также законы экстремального регулирования.
4.По характеру поддержания заданного значения: а) стабилизирующие; б) программные регуляторы;
в) экстремальные — поддерживают значение регулируемой величины на наибольшем или наименьшем уровне; г) следящие системы — слежение за некоторым входным сигналом,
изменяющемся во времени по заранее неизвестной зависимости;
Государственная Система Приборов в технических средствах автоматизации.
Создана ГСП, охватывающая измерительную, управляющую и регулирующую технику. Одна из задач — создание ограничений номенклатуры унифицированых устройств, способных максимально удовлетворять требования построения автоматических систем управления и регулирования.
Основным преимуществом конструирования АСУТП является блочномодульный принцип – агрегирование. Агрегирование является 3 этапом конструкторного исполнения. От середины 20 века конструктивные решения прошли 3 этапа:
1-й этап представлял собой этап приборных систем регулирования – измерительный прибор (вторичный) и регулятор выполнялись в одном корпусе. При этом вторичный прибор являлся одним из элементов системы регулирования, что резко снижало надежность последней.
7
2-й этап – аппаратные системы регулирования. Регулятор и устройство измерения разделили, вторичный прибор вывели из состава контура регулирования. Информация от датчика стала передаваться непосредственно на регулятор. При этом в регуляторе появился узел, который должен обеспечивать стыковку разных типов датчиков с регулятором. Таким образом, за счет сменности измерительного органа обеспечена универсальность и повышена надежность системы вцелом.
3-й этап – агрегатные системы. Каждая СР строится за счет комбинирования, изменения порядка подключения различных блоков и модулей, обменивающихся унифицированными сигналами.
Блок – конструктивное сборное устройство, выполняющее одну или несколько функций, смонтированое в одном корпусе.
Модуль — более простая структурная единица, унифицированный узел, выполняющий одну элементарную операцию и входящий в состав блока или прибора.
Исполнительные механизмы – устройства для преобразования управляющей информации в механическое перемещение регулирующего органа и развивающее мощность, достаточную для потребителя.
Всоставе ГСП имеется 3 ветви приборов:
1.Электрическая;
2.Пневматическая;
3.Гидравлическая.
Электрическая – высокая точность и удобство воспроизведения законов регулирования; возможность строить распределенные системы регулирования; быстродействие передачи сигналов. Первые электрические устройства – лампы, затем полупроводники, интегральные схемы — уменьшение размеров, повышенная надежность.
Пневматическая – пожаро-, взрывобезопасность; несколько сложнее реализуются законы регулирования и меньшие диапозоны изменения параметров, передача сигналов осуществляется медленнее, исполнительные механизмы более быстрые.
Гидравлическая – наименее гибкая ветвь, узкий диапозон применения, реализует простейшие функции, исключительно надежная, исполнительные механизмы самые лучшие (высокая мощность, высокое усилие, высокая скорость при ограниченых размерах).
Унифицированные сигналы ГСП.
Электрические ГОСТ 9895-78 |
|
|
|
Токовый сигнал постоянного тока: |
0... |
5 мА (наиболее распространены); |
|
|
-5... |
0... |
+5 мА; |
|
0... |
20 |
мА; |
|
4... |
20 |
мА. |
Сигналы по напряжению: |
0... |
10 мВ; |
|
|
-10...0...+10 В; |
||
|
0... |
24 |
В; |
|
0... |
48 |
В; |
|
0... |
110 В; |
|
|
0... |
220 В. |
|
Сигналы переменного тока: |
0... |
1 В; |
|
|
0... |
2 В; |
|
|
0... |
220 В; |
|
|
0... |
36 |
В; |
|
0... |
127 В. |
|
8
Частотные сигналы ГОСТ 10938-75 Пневматические сигналы: 0,1...1,0 атм;
0,01...0,1 МПа.
Структура системы автоматического регулирования.
xд(t) — сигнал датчика. xзд(t) — сигнал задатчика.
ЗД — задатчик — вводит требуемое значение величины.
ИБ — измерительный блок — воспринимает и сравнивает сигнал датчика и задатчика, формирует сигнал рассогласования x(t), преобразует его в более удобную форму x(t)=xзд(t)-xд(t).
ФБ — формирующий блок — формирует требуемый закон регулирования — уравнение регулятора или закон регулирования (связывает сигналы x(t) и y(t) — перемещение регулирующего органа) y=fp(x(t)).
za(t) — сигнал автоматического регулирования. zp(t) — сигнал ручного регулирования.
ПРР — переключатель режима работы системы регулирования и модуль ручного (дистанционного) управления составляют Блок Управления.
Автоматический режим работы — воздействие на объект в соответствии с законом управления.
Ручное управление — с помощью кнопок дистанционного управления.
ИУ — исполнительный усилитель — усиливает по мощности командный сигнал от ПРР или от ручного управления (za(t) или zp(t)), не осказив его.
ИМ — исполнительный механизм — реализует командный сигнал, оказывая регулирующее воздействие на регулирующий орган.
На пульте оператора находятся органы оперативного управления.
9

Домашнее задание:
1.Определение: что такое параметр регулирования.
2.Законы регулирования.
Выполнение домашнего задания.
1.Параметрами регулирования называются буквенные коэффициенты в законах регулирования.
2.Законы регулирования:
П-закон:
И-закон:
ПИ-закон:
ПД-закон:
ПИД-закон:
y(t) y(t)
y(t)
y(t)
y(t)
=KP x(t) + y0
1t
=Tu ò0 x(t) + y0
é |
1 |
t |
ù |
|
= KP êx(t) + |
òx(t)dtú + y0 |
|||
T |
||||
ë |
u 0 |
û |
||
=KP éêx(t) +TД dx(t)ùú + y0
ëdt û
é |
1 |
t |
dx(t)ù |
|
|
= KP êx(t) + |
|
òx(t)dt +TД |
|
ú |
+ y0 |
T |
dt |
||||
ë |
u 0 |
|
û |
|
|
Требования к универсальным Техническим Средствам Автоматизации.
Датчик. Требования к регулируемым параметрам: универсальный регулятор должен поддерживать разные технологические переменные (или датчики должны иметь стандартизованный унифицированный выход, или входы регулятора должны поддерживать разные сигналы от датчиков).
Задатчик. Ввод в регулятор заданного значения регулируемой величины с заданной точностью и стабильностью.
Способы ввода входного сигнала в регулятор.
Способы ввода входного сигнала в регулятор: приборный, аппаратный, агрегатный.
Приборный способ ввода входного сигнала.
Датчикпреобразователь механически связан со стрелкой прибора. Универсальные регуляторы должны допускать подключение к ним различных датчиков.
Выполнение достигается за счет применения унифицированных сигналов.
Еще один вариант решения предусматривает исполнение датчикапреобразователя и задатчика в одном формирующем блоке, но при этом резко
уменьшается надежность системы регулирования так как регистрация производится в
10